
Ang LXWGP-ETS-Siemens Wired Electronic Handwheel
Hulagway


Ang electronic handwheel gigamit alang sa manwal nga paggiya sa mga gamit sa makina sa CNC、posisyon、Operasyon sa welga。Kini nga modelo sa electronic handwheel usa ka Siemens wired electronic handwheel nga adunay tinuod nga display.,Ang handwheel konektado sa X130 interface sa Siemens system pinaagi sa network cable.,Basaha ang mga coordinate sa sistema ug ipakita kini sa LCD display sa handwheel pinaagi sa S7 protocol communication.,Ug ang pagpili sa axis sa sistema sa pagkontrol sa handwheel mahimo pinaagi sa komunikasyon.、ipadako、Button ug uban pang signal。

1.Konektado gamit ang 6-core aviation plug cable,Handwheel cable gitas-on 10 metros。
2.Ang screen sa handwheel mahimong magpakita sa mga coordinate sa workpiece sa sistema、Mekanikal nga mga coordinate、Kadali sa pagpakaon、Pagpili sa axis、Impormasyon sama sa pagpadako。
3.Suporta sa Emergency Stop button,Pagbalhin sa Kadaghan nga IO Signal Output,Ang paghunong sa emerhensya nga pagpahunong sa handwheel epektibo gihapon。
4.Nagsuporta sa 6 custom nga buton,Pagbalhin sa IO Signal,Makapagawas ug signal sa sistema pinaagi sa IO wiring o komunikasyon。
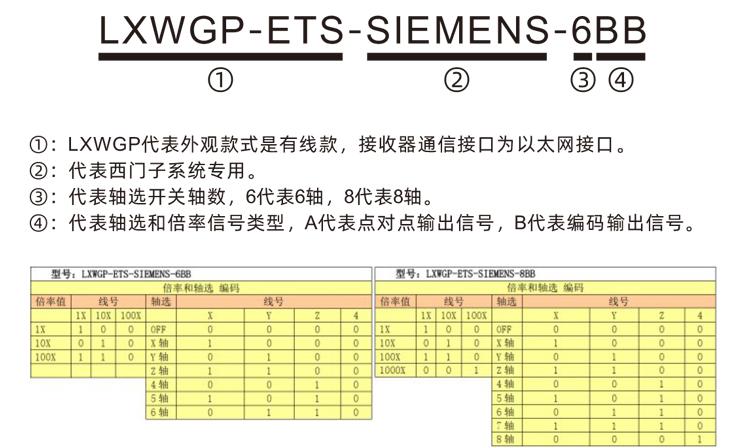
5.Nagsuporta sa 6 o 8 axis control,Pagbalhin sa IO Signal,Makapagawas ug signal sa sistema pinaagi sa IO wiring o komunikasyon。
6.Pagsuporta sa 3 o 4 nga lebel sa pagkontrol sa pagpadako,Pagbalhin sa IO Signal,Makapagawas ug signal sa sistema pinaagi sa IO wiring o komunikasyon。
7.Pagsuporta sa pulso encoder,100Pulse / lingin,Ang signal mahimong output sa sistema pinaagi sa AB pulse wiring.。
8.Suportahi ang Siemens S7 protocol,Suportahi ang Siemens 828D、840DSL、USA ug uban pang mga sistema sa modelo。

| Handwheel nga nagtrabaho nga boltahe sa suplay sa kuryente | DC24V/1A |
| Madawat nga Koleksyon sa Gahum sa Pagdumala | DC24V/1A |
| Receiver IO output load range |
DC24V
|
| Ang gitas-on sa kable sa tumoy sa handwheel |
10m
|
| Ang gitas-on sa cable sa receiver |
1m
|
| Receiver end network cable gitas-on |
3m
|
| Temperatura sa operasyon |
-25℃<X<55℃
|
| Anti-Fall Taas |
1m
|
| Ipasadya ang gidaghanon sa mga buton | 6indibiduwal |
| Gidak-on sa produkto | 233*90.7*77.4(mm) |


Mga Komento:
Button sa paghunong sa ①emerGency:
Pindota ang button sa STOP sa Emergency,Duha ka grupo sa mga Emergency Stop Io output sa tigdawat ang na-disconnect,Ug ang tanan nga mga function sa handwheel dili balido。
Pagkahuman gibuhian ang emergency nga paghunong,Ang Emergency Stop Io Output gisirhan sa tigdawat,Ang tanan nga mga gimbuhaton sa handwheel gipahiuli。
Ang display sa ②screen:
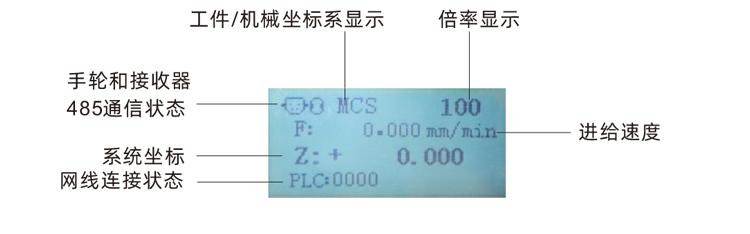
PLC:0000Kini nagpasabot nga ang network cable dili konektado,PLC:1010Kini nagpasabot nga ang network cable ug PLC system malampuson nga konektado.,
PLC:1110Nagpakita nga ang handwheel nagsulat sa datos sa sistema nga malampuson.,PLC:0001Nagpakita sa malampuson nga koneksyon sa kompyuter。
Button sa ③custom:
6Mga batasan nga butones,Ang matag butones katumbas sa usa ka output sa IO output sa tigdawat,Gikonektar usab sa sistema pinaagi sa komunikasyon。
Switch sa pagpili sa ④axis:
Ang pagbalhin sa switch sa pagpili sa Axis mahimo nga ibalhin ang pagbalhin nga Axis nga kontrolado sa handwheel。
⑤Enable nga buton:
Padayon ug hupti ang bisan unsang magamit nga butones sa bisan unsang daplin,Kini epektibo pinaagi lamang sa pag-uyog sa pulso encoder。 Ug ang 2 nga mga sets nga nakapaarang sa mga output sa IO sa tigdawat gi-on,Ipagawas ang button sa Pag-agad,Pag-ayo sa IO output disconnection。
⑥Magnification switch:
Ang pagbalhin sa switfication switch mahimo nga ibalhin ang pagtao sa pagtao sa ligid sa kamot.。
⑦Pulse encoder:
Padayon ug kupti ang magamit nga butones,Pag-shaking pulse encoder,Pagpadala usa ka signal sa pulso,Kontrolaha ang Machine Shaft Movement。
⑧Kamot nga kable sa ligid:
Cable nga nagkonektar sa handwheel ug receiver,plug sa abyon,Para sa handwheel power supply ug komunikasyon。



6.1Mga lakang sa pag-install sa produkto
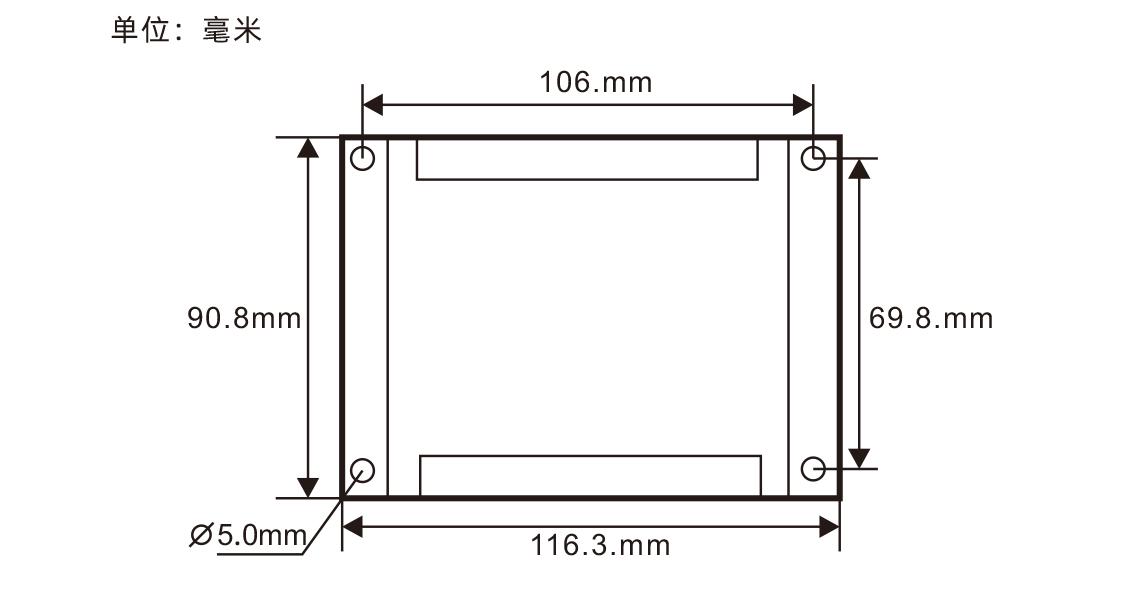
1.I-install ang receiver sa electrical cabinet pinaagi sa screw hole sa upat ka eskina.。
2.Paghisgot sa among diagram sa Newer,Itandi ang imong kagamitan sa site,Ikonektar ang device pinaagi sa cable ug receiver
sumpay,Gamit ug network cable aron makonektar ang receiver sa X130 interface sa system。
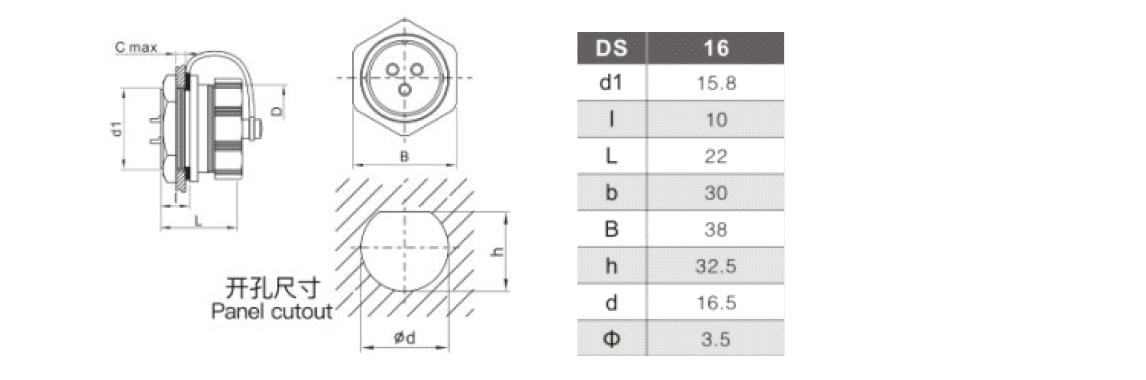
3.Human maayos ang makadawat,I-install ang aviation plug base sa handwheel opening sa panel,Lain nga base
Ang terminal strip gisaksak sa handwheel interface sa receiver.。Dayon isulod ang aviation plug sa handwheel end cable ngadto sa base,Hugot
mga fixtures。
6.2Gidak-on sa Pag-instalar sa Pagdawat
6.3Mga sukat sa pag-instalar sa plug sa abyon
6.4Diagram sa Reacrer Wiring Discrence

6.2Gidak-on sa Pag-instalar sa Pagdawat
6.3Mga sukat sa pag-instalar sa plug sa abyon
6.4Diagram sa Reacrer Wiring Discrence

1.Ang tigdawat gipadagan sa,Ang nagdumala nga operating nga suga naa sa,Ikonektar ang receiver sa kompyuter gamit ang network cable,Pagbutang ug fixed IP address para sa imong computer,Gamita ang network configuration tool software aron itakda ang mga parameter sa network alang sa handwheel function,Piho nga mga setting
Para sa pamaagi, palihog tan-awa ang "Mga Instruksyon sa Paggamit sa LXWGP-ETS Wired Handwheel"。
2.Human makompleto ang setup sa receiver,Ang sistema nanginahanglan programming PLC nga programa,Para sa mga detalye, palihog tan-awa ang "LXWGP-ETS Setting Methods for Different Siemens CNC Systems" ug PLC program routine information。
3.Human makompleto ang mga setting sa ibabaw,Dad-a ang receiver ngadto sa electrical cabinet sa makina ug i-install kini,I-unplug ang network cable gikan sa computer ug i-plug kini sa X130 interface sa system,I-plug ang receiver power ug pulse wires。
4.Ang makina gipadagan,Ang tigdawat gipadagan sa,Ang nagdumala nga operating nga suga naa sa,I-on ang handwheel power switch,Handwheel screen boot,Pagpakita sa screen PLC:1010,Nagpakita sa malampuson nga komunikasyon tali sa handwheel ug sa sistema.。
5.Pilia ang pagpili sa axis:Pagbalhin sa switch sa Pagpili sa Axle,Pilia ang Axis nga gusto nimo nga molihok。
6.Pilia ang PUPERO:I-switch ang switfication switch,Pilia ang PUPERO NGA GUSTO NIMU。
7.Ibalhin ang Axis:Padayon ug kupti ang magamit nga butones,Pilia ang Axis ug Switch,Pilia ang Multultier Switch,Pagkahuman ibalik ang enpoder sa pulso,Pag-on sa Overwise Sayo nga Axis Axis,I-on ang negatibo nga kalihokan Axis nga counterclockwise。
8.Padayon ug paghupot sa bisan unsang kostumbre nga butones,Ang katugbang nga butones nga Output sa Output sa tigdawat gi-on,Ipagawas ang button sa Output。
9.Pindota ang button sa STOP sa Emergency,Gikuha sa tigdawat ang Emergency Stop Io Output,Ang function sa kamot napakyas,Buhian ang button sa Emergency Ont,Ang Emergency Stop Io Output sirado,Pagkaayo sa Kamot。


| Fault nga kahimtang | Posible nga hinungdan |
Mga pamaagi sa pagsulbad
|
|
|
Mga pamaagi sa pagsulbad
|
1.Kung ang aviation cable tali sa handwheel ug ang receiver konektado sa husto ug kasaligan
2.Igo ba ang boltahe sa gahum sa tigdawat?
3.Kapakyasan sa Kutla
|
1.Susiha ang koneksyon sa aviation cable tali sa handwheel ug sa receiver
2.Susiha ang gahum sa input sa receiver
3.Pakigsulti sa tiggama aron makabalik sa pabrika alang sa pagmintinar
|
|
| Walay tubag sa dihang nag-operate sa handwheel |
1.Ang mga network cable ba tali sa receiver ug system konektado?
2.Maayo ba ang pagkasulat sa programa sa sistema sa PLC?
3.Sakto ba ang gitakda nga configuration sa receiver?
4.Napakyas ba ang 485 nga icon sa komunikasyon nga gipakita sa handwheel display?
5.Sa diha nga nag-operate sa handwheel,Kinahanglan nimo nga ipadayon ug hupti ang mga buton nga mahimo sa duha ka kilid
6.Gipagawas ba ang emergency stop button?
|
1.Susiha kon ang receiver ug ang sistema X130 network port konektado sa usa ka network cable
2.Susiha ug kumpirmahi kung ang sistema sa PLC gisulat sumala sa mga reference nga materyales nga among gihatag.
3.Susiha kon ang tigdawat nagtumong ba sa among impormasyon ug gihatag nga tool software,Husto nga ibutang ang mga parameter sa network ug DB address sa tigdawat, ug uban pa.
4.Susiha tali sa handwheel ug receiver
6core green nga socket,Duha sa mga linya sa komunikasyon:485-A ug 485-B,Sakto ba kini ug luwas nga konektado?,Naa bay circuit break?
|
|
|
Human maigo ang makadawat,Ang suga sa trabaho sa receiver dili mosiga
|
1.Kusog nga Pagsuplay sa Kusog
2.Sayup sa Kalig-on nga Kutya
3.Kapakyas sa Pagdawat
|
1.Susiha kung ang suplay sa kuryente adunay boltahe,
Nahuman ba ang boltahe sa mga kinahanglanon
2.Susihon kung ang positibo ug negatibo nga mga poste sa suplay sa kuryente nga konektado
3.Balik sa Pagministro sa Pabrika
|

1.Palihug sa temperatura sa kwarto ug presyur,Gigamit sa uga nga palibot,Pagpalapad sa kinabuhi sa serbisyo。
2.Palihug likayi ang pag-ulan sa ulan、Gigamit sa dili normal nga palibot sama sa mga blisters,Pagpalapad sa kinabuhi sa serbisyo。
3.Palihug hupti nga limpyo ang handwheel,Pagpalapad sa kinabuhi sa serbisyo。
4.Palihug likayi ang pagpuga、Mahulog、Pagbuto, ug uban pa.,Paglikay sa mga aksesorya sa katukma sa sulod sa handwheel gikan sa kadaot o mga sayup sa katukma。
5.Wala gigamit sa dugay nga panahon,Palihug tipigi ang handwheel sa usa ka limpyo ug luwas nga lugar。
6.Pagtagad sa kaumog-Proof ug shock-proof sa panahon sa pagtipig ug transportasyon。

1.Palihug basaha ang mga panudlo alang sa paggamit sa detalye sa wala pa gamiton,Ang mga dili propesyonal nga mga kawani gidili。
2.Human sa bisan unsa nga abnormal nga sitwasyon mahitabo sa handwheel,Palihug hunong dayon sa paggamit niini,ug troubleshoot,Sa dili pa mag-troubleshoot,Gidili ang paggamit pag-usab sa sayup nga handwheel,Likayi ang mga aksidente sa kaluwasan tungod sa wala mailhi nga handwheel failures;
3.Kung ang pag-ayo gikinahanglan,Palihug kontaka ang tiggama,Kung ang kadaot nga gipahinabo sa pag-ayo sa kaugalingon,Ang tiggama dili maghatag usa ka garantiya。
.png)




