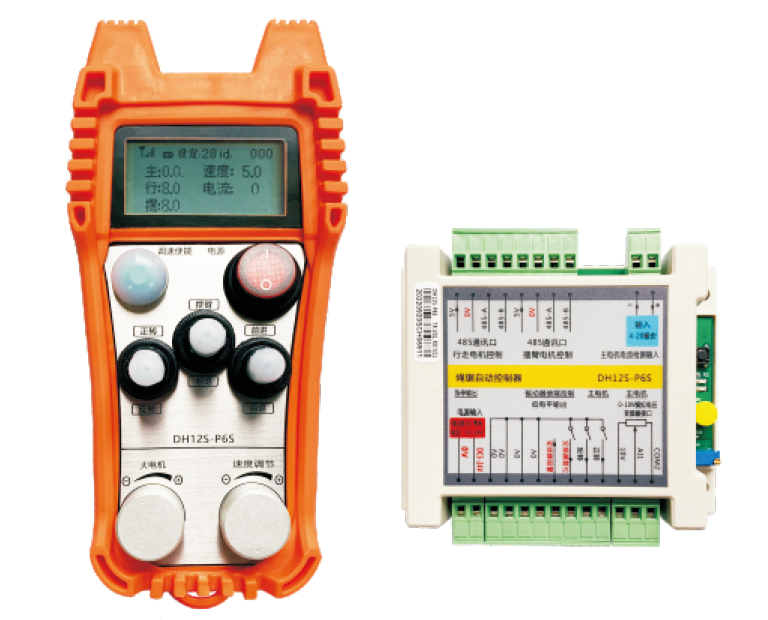
Wire Gwelodd peiriant torri awtomatig rheoli o bell di-wifr
Torri Awtomatig Rheolaeth o Bell Di-wifr ar Wire Saw Machine Dh12S-P6S
Disgrifiadau


fodelwch:Offer addasydd DH12S-P6S:Peiriant llifio gwifren / llafn llifio


Sylw:Gellir dewis tri math o antena,Mae'r antena cwpan sugno diofyn wedi'i gyfarparu â safon


Prif gyflymder modur:gwesteiwr:0-50
Cyflymder modur teithio:iawn:0-50
Terfyn cyflymder uchaf modur teithio torri awtomatig:goryrru:0-30(Mae'r paramedrau'n addasadwy)
Cerrynt gosod prif modur torri awtomatig:sefydlu:28(Mae'r paramedrau'n addasadwy)
Cyflymder modur braich swing:rhoi:0-50

Gwasgedd isel:Mae batri'r teclyn rheoli o bell yn rhy isel,Amnewid y batri os gwelwch yn dda

Cwympo allan o'r rhyngrwyd:Ymyrraeth signal diwifr,Gwiriwch y cyflenwad pŵer derbynnydd,Pŵer ymlaen eto,Ailgychwyn y teclyn rheoli o bell

1、Trodd rheolaeth o bell ymlaen
Mae'r derbynnydd yn cael ei bweru ymlaen,Mae'r golau pŵer D2 ar y derbynnydd ymlaen bob amser,Mae golau signal D1 yn dechrau fflachio;Dau fatris Rhif 5 wedi'u gosod ar y teclyn rheoli o bell,Trowch y switsh pŵer ymlaen,Arddangos Cyflymder Modur Arddangos,Mae'n golygu bod y cychwyn yn llwyddiannus。
2、Prif reoleiddio modur a chyflymder
Pwyswch a dal "galluogi rheoli cyflymder",Trowch y switsh "ymlaen/gwrthdroi" i ymlaen,Mae prif fodur y derbynnydd yn cylchdroi ymlaen ac yn troi ymlaen;
Pwyswch a dal "galluogi rheoli cyflymder",Trowch y switsh "ymlaen/gwrthdroi" i ymlaen,Mae prif fodur y derbynnydd yn cylchdroi ymlaen ac yn troi ymlaen;
Pwyswch a dal "galluogi rheoli cyflymder",Trowch y switsh "ymlaen/gwrthdroi" i wrthdroi,Mae prif fodur y derbynnydd yn gwrthdroi ac yn troi ymlaen;
Yn syml, symudwch y switsh i'r canol neu'r cefn,Mae'r prif fodur yn stopio ar unwaith,Nid oes angen pwyso rheolaeth cyflymder i alluogi;
Trowch y bwlyn "Modur Mawr".,Gellir addasu foltedd rheoleiddio cyflymder gwrthdröydd modur prif dderbynnydd 0-10V;
3、Modur teithio
3、Modur teithio
Pwyswch a dal "galluogi rheoli cyflymder",Symudwch y switsh "ymlaen / cefn" ymlaen neu yn ôl,Bydd y modur cerdded yn symud ar gyflymder uchel o 50;
4、Modur braich swing a rheoleiddio cyflymder
Trowch y switsh "Swing Arm/Reverse" i fraich swing neu wrthdroi,Mae modur braich swing y derbynnydd yn dechrau;Yna trowch y bwlyn "Addasiad Cyflymder".,Gellir addasu cyflymder modur braich swing;
Pwyswch a dal "galluogi rheoli cyflymder",Yna trowch y switsh "swing braich / cefn".,Bydd y modur braich swing yn symud ar gyflymder uchel o 50;
5、Addasiad terfyn cyflymder modur teithio
Pwyswch a dal y botwm "Galluogi Cyflymder".,Trowch "Addasiad Cyflymder" i addasu terfyn cyflymder uchaf y modur teithio yn ystod torri awtomatig.;
6、Torri awtomatig
Cam cyntaf,Dechreuwch y prif fodur;Cam 2,Addaswch derfyn cyflymder uchaf y modur teithio;Cam 3,Trowch y switsh "ymlaen / cefn" i symud ymlaen neu yn ôl,Rhowch fodd torri awtomatig;
7、Gosodiadau paramedr (gwaherddir defnyddwyr rhag eu haddasu'n breifat)
Rhowch y ddewislen paramedr:Yn y modd llaw,Pan fydd y prif gyflymder modur yn 0,Mae switsh ymlaen/gwrthdroi wedi'i blygu i fyny 3 gwaith yn olynol,Yna ei dorri 3 gwaith yn olynol,Rhowch y ddewislen paramedr;
Allanfa'r ddewislen paramedrau:Troi tudalen knob addasiad cyflymder,Dewiswch arbed neu beidio â chadw,Cadarnhewch trwy wasgu'r botwm galluogi;
Cerrynt graddedig:Gwerth uchaf y prif gerrynt modur,Uned Ampere;
Paramedrau Rheoleiddio Cyflymder:Paramedrau rheoli torri awtomatig,Diofyn 800,Uned milieiliad,Gwaherddir addasu;
Paramedrau arafu:Pan fydd y gwerth newid cyfredol torri yn fwy na'r gwerth hwn,Dechreuwch arafu'n gyflym,Uned Ampere;
Cyflymiad A1:Pan fydd y cerrynt torri yn is na'r cerrynt torri set,Cynyddodd y gwerth cyflymder gan bob cyflymiad o'r modur cerdded;
Arafiad a2: Pan fydd y cerrynt torri yn uwch na'r cerrynt torri set,Mae'r gwerth cyflymder wedi'i leihau gan bob arafiad yn y modur cerdded;
Cerrynt braich swing:gwerth rhagosodedig,Gwaherddir addasu;
amser stopio:Ar ôl cau i lawr oherwydd gorlwytho cyfredol yn y modd awtomatig,Gwiriwch y cerrynt eto ar ôl cyfnod o amser,Os yw'n llai na'r cerrynt gosod,Cychwynnwch y modur cerdded yn awtomatig;Uned yn ail,gwerth rhagosodedig,Gwaherddir addasu;
amser stopio:Ar ôl cau i lawr oherwydd gorlwytho cyfredol yn y modd awtomatig,Gwiriwch y cerrynt eto ar ôl cyfnod o amser,Os yw'n llai na'r cerrynt gosod,Cychwynnwch y modur cerdded yn awtomatig;Uned yn ail,gwerth rhagosodedig,Gwaherddir addasu;
Uchafswm cerrynt:Ystod gyfredol adborth prif modur,Uned Ampere;
Uchafswm gwesteiwr:Ystod arddangos cyflymder prif modur rheoli o bell;
Uchafswm cerdded:Paramedr annilys;
Gwrthbwyso terfyn cyflymder:Wrth dorri'n awtomatig,Rheolaeth bell arddangos terfyn cyflymder modur cerdded = 50% o'r paramedr hwn;
Ychwanegu sensitifrwydd:Pan fydd cerrynt adborth y prif modur yn cynyddu,Bob tro mae'r gwerth yn cynyddu y tu hwnt i'r gwerth hwn,Cyflymiad modur teithio;
Lleihau sensitifrwydd:Pan fydd cerrynt adborth y prif modur yn gostwng,Bob tro mae'r gwerth yn gostwng mwy na'r gwerth hwn,Arafiad modur teithio;
Sensitifrwydd gwrthbwyso:Cynyddiad gwrthbwyso ar gyfer paramedrau sensitifrwydd plws a minws;
Gosod cyfredol:Torri awtomatig,Trothwy cerrynt adborth prif modur,rhagori ar y gwerth hwn,Mae'r modur cerdded yn dechrau arafu;yn is na'r gwerth hwn,Mae'r modur cerdded yn dechrau cyflymu;Uned Ampere;
Gosod cyfredol:Torri awtomatig,Trothwy cerrynt adborth prif modur,rhagori ar y gwerth hwn,Mae'r modur cerdded yn dechrau arafu;yn is na'r gwerth hwn,Mae'r modur cerdded yn dechrau cyflymu;Uned Ampere;
Allanfa wag:Pan fydd modd awtomatig yn dechrau,Os yw'r cerrynt adborth prif modur yn llai na'r gwerth hwn,yn segura,yn fwy na'r gwerth hwn,yna gadael modd segura,Rhowch modd torri,Uned Ampere;
Cyfredol dim llwyth:Pan fydd modd awtomatig yn dechrau,Os yw'r cerrynt adborth prif modur yn llai na'r gwerth hwn,yn y modd dim-llwyth,yn fwy na'r gwerth hwn,yna gadewch y modd dim-llwyth,Rhowch modd torri,Uned Ampere;
Cyflymder braich swing:Cyflymder cychwyn modur braich swing;
modd torri:Newid rhwng moddau llif llafn a llif gwifren,Ar ôl newid, bydd y paramedrau hefyd yn newid yn unol â hynny.;Yn y modd llafn llif,Mae modur braich swing yn cael ei ychwanegu at yr arddangosfa rheoli o bell,Nid oes gan y modd gwelodd wifren fodur braich swing.;
Amser dadlamu:Pan fydd cerrynt adborth y prif fodur yn fwy na'r cerrynt stopio,Bydd yn canfod yr adborth yn gyfredol yn barhaus,Yr amser daduno yw hyd y canfod parhaus hwn.,rhagori ar yr amser hwn,Canfod bod y prif gerrynt modur yn dal i fod yn fwy na'r cerrynt stop,cerddedBydd y modur yn stopio;Fel arall, bydd y modur cerdded yn parhau i symud ymlaen;
cerrynt stop:Mae'r prif gerrynt adborth modur yn fwy na'r gwerth hwn,Bydd y modur teithio yn stopio;Uned Ampere;
gwrthbwyso diofyn:Gwerth cychwynnol y terfyn cyflymder modur cerdded pan fydd y teclyn rheoli o bell yn cael ei droi ymlaen = 50% o'r gwerth hwn;
![]()
| Cyflenwad pŵer gweithredu derbynnydd |
DC24V/1A (Cyflenwad Pwer Annibynnol)
|
| Llwyth pwynt allbwn derbynnydd | AC0-250V/3A DC0-30V/5A |
| Foltedd allbwn rheoleiddio cyflymder derbynnydd | DC0-10V |

Mae hawl dehongli terfynol y cynnyrch hwn yn perthyn i Chengdu Core Synthetic Technology Co, Ltd.。


-500x650.png)