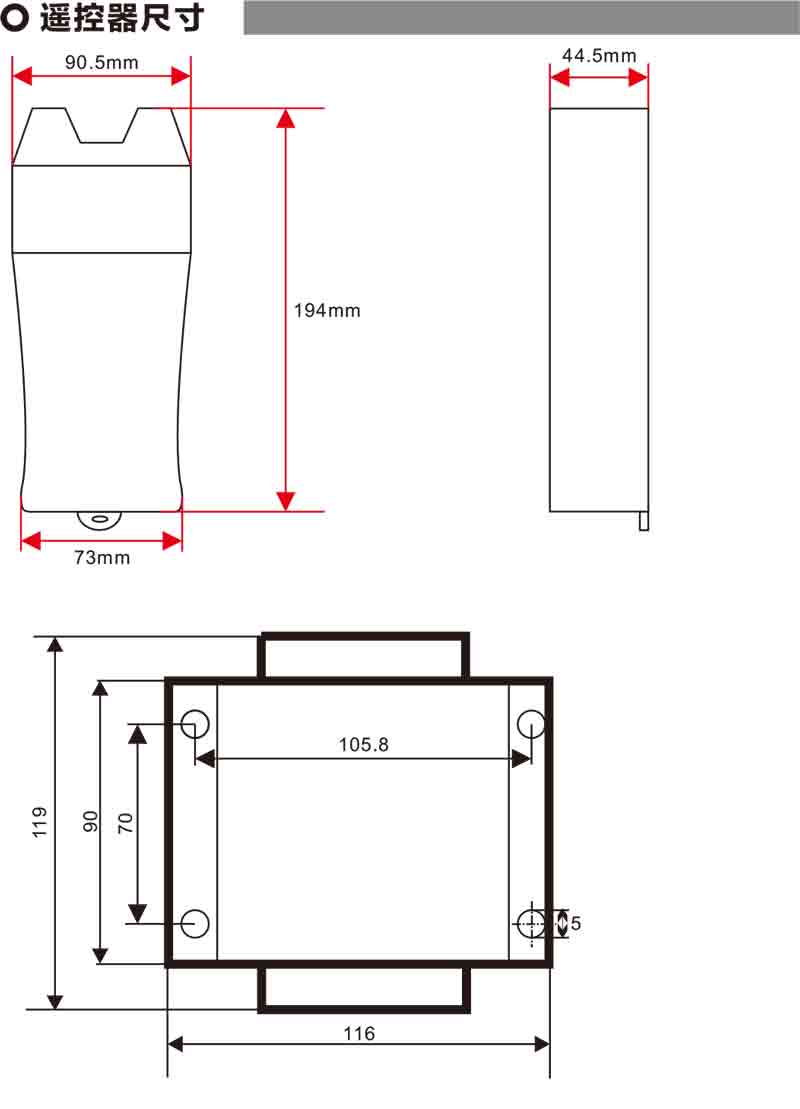
Langattoman kauko -ohjaimen automaattinen leikkaus indeksointiköyssahaan
Crawler Köyden sahan kone-automaattinen langaton kaukosäädin DH12S-LD
Kuvaus

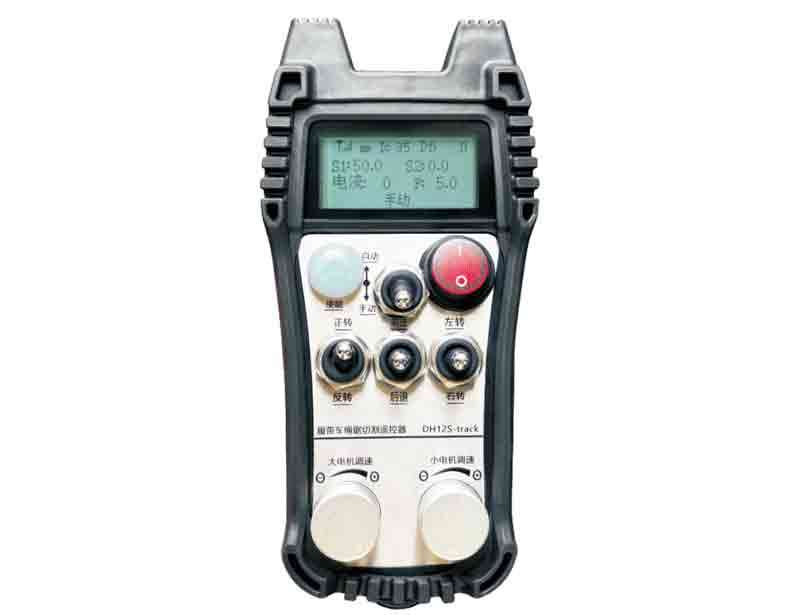
malli:DH12S-LD Mukautuvat laitteet:Indeksointikökin

Huomautus:Kolme tyyppiä antenneja voidaan valita,Oletuksena oleva imukuppi -antenni on varustettu vakiona 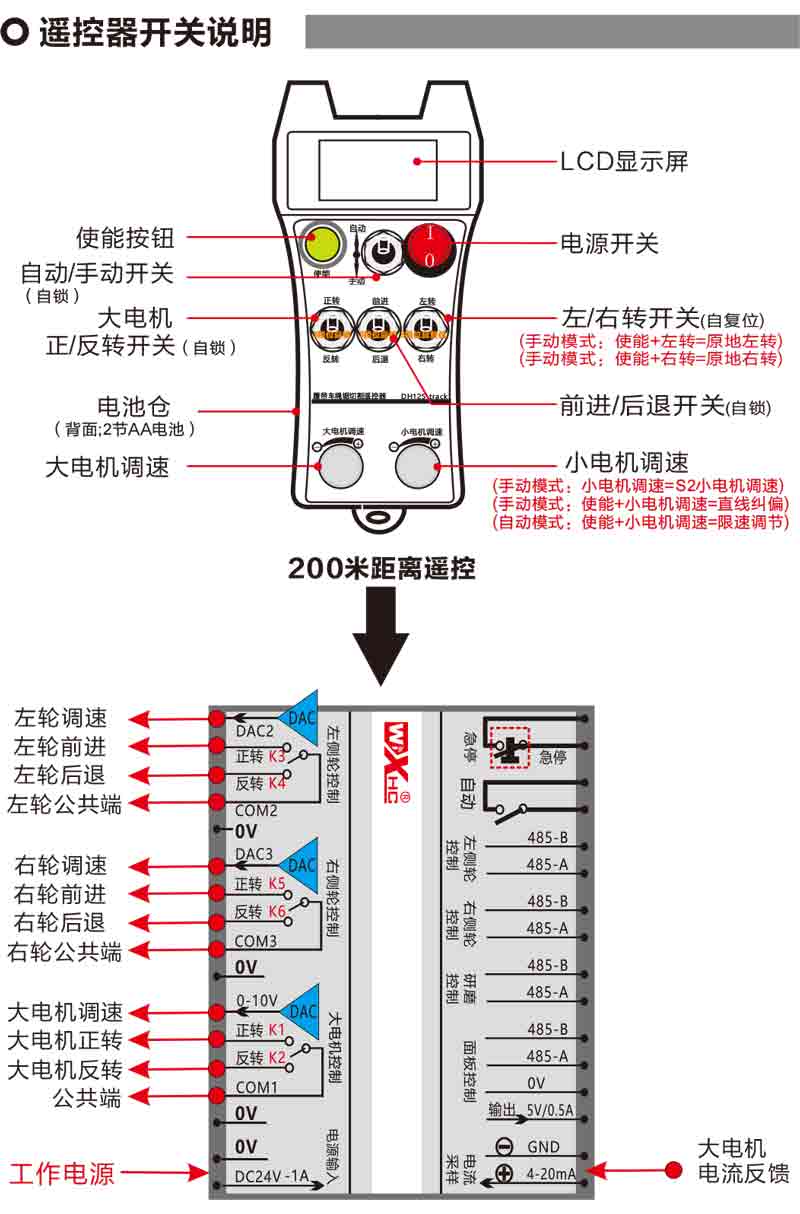

Suuri moottorin nopeus:S1:0-50
Pieni moottorin nopeus:S2:0-50
Automaattinen leikkausmoottorin enimmäisnopeusrajoitus:F:0-30(Parametrit ovat säädettävissä)
Automaattinen leikkaus enimmäisvirta:IC:0-35(Parametrit ovat säädettävissä)
Lineaarinen poikkeaman korjausarvo:Df:-99-99(1 yksikkö on noin 0,02 V))
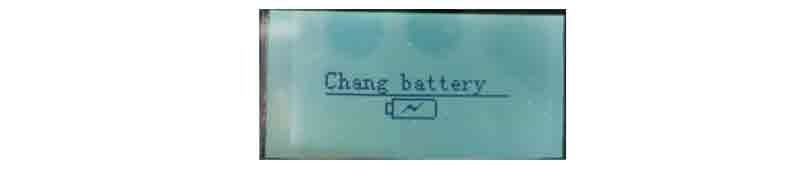
Matalapaine:Kaukosäätimen akku on liian matala,Vaihda akku
Pudota Internetistä:Langaton signaalin keskeytys,Tarkista vastaanottimen virtalähde,Voima taas,Käynnistä kaukosäädin uudelleen
![]()
1、Kaukosäädin kytketty päälle
Vastaanotin on käynnissä,Vastaanottimen RF: n johtama valo alkaa vilkkua;Kaksi nro 5 paristoa, jotka on asennettu kaukosäätimeen,Käynnistää virtakytkin,Näytön näytön moottorin nopeus,Se tarkoittaa, että käynnistys on onnistunut。
2、Suuri moottori- ja nopeussäätely
Käännä "eteenpäin/käänteinen" kytkin eteenpäin,Vastaanottimen suuri moottori kytkeytyy,Näyttö näyttää eteenpäin kiertoa ;
;
Käännä "eteenpäin/käänteinen" kytkin käänteiseen,Vastaanotin suuri moottorin käännös jstk,Näytön näytön inversio ;
;
;Käännä "eteenpäin/käänteinen" kytkin käänteiseen,Vastaanotin suuri moottorin käännös jstk,Näytön näytön inversio
;Kierrä "suuren moottorin nopeuden säätelyn" nuppia,Se voi säätää vastaanottimen suuren moottorin nopeuden säätelyn 0-10 V lähtöjännitettä;
3、Pieni moottori ja nopeussääntely
Käännä "eteenpäin/käänteinen" kytkin eteenpäin,Vastaanottimen revolverin eteneminen ja oikea edistys,Näyttää
Käännä "eteenpäin/peruutus" kytkin taaksepäin,Vastaanottimen kääntäminen ja oikea pyörän kääntyminen auki,Näyttää
Manuaalitilassa:Kierrä "pienen moottorin nopeuden säätely" -nuppia,Samanaikaisesti säädä vastaanottimen vasemman pyörän oikean pyörän nopeuden säätö 0-10 V: n lähtöjännite;
Manuaalitilassa:Kierrä "pienen moottorin nopeuden säätely" -nuppia,Samanaikaisesti säädä vastaanottimen vasemman pyörän oikean pyörän nopeuden säätö 0-10 V: n lähtöjännite;
4、Kääntyä vasemmalle ja oikealle
Käännä "vasen/oikea" kytkin vasemmalle,Vastaanottimen oikea pyörän eteneminen avautuu,Näyttö näyttö kääntyy vasemmalle
Käännä "vasen/oikea" kytkin oikealle,Vastaanottimen revolverin ennakko avautuu,Näyttö näyttö kääntyy oikealle
5、Kääntyminen paikalleen
Manuaalitilassa:
Käänny vasemmalle paikoilleen:Pidä käyttöpainiketta painettuna,Käännä "vasen/oikea" kytkin vasemmalle,Vastaanottimen kääntö ja oikea pyörän etukäteen avoin,Alkaa kääntyä vasemmalle paikoilleen;
Kääntyä oikealle paikalleen:Pidä käyttöpainiketta painettuna,Käännä "vasen/oikea" kytkin oikealle,Astian revolverin edistyminen ja oikean pyörän selkänojat avautuvat,Aloita kääntyminen oikealle paikalleen;
6、Pienen moottorin nopeusrajoituksen säätö
Automaattisessa tilassa:Pidä käyttöpainiketta painettuna,Kierrä "pienen moottorin nopeuden säätely" pienen moottorin suurimman nopeuden säätämiseksi automaattisen leikkauksen aikana;
7、Automaattinen leikkaus
ensimmäinen askel,Aloita iso moottori;
Vaihe 2,Kytke tilan kytkin "auto";
Vaihe 3,Aloita pieni moottori,Näytön näyttö tulee "automaattisen leikkaamisen",Osoittaa, että automaattinen leikkaustila on syötetty;
Vaihe 2,Kytke tilan kytkin "auto";
Vaihe 3,Aloita pieni moottori,Näytön näyttö tulee "automaattisen leikkaamisen",Osoittaa, että automaattinen leikkaustila on syötetty;
8、Suoran linjan korjaus
Kun vasen ja oikea moottori liikkuu eteenpäin ja taaksepäin,Vasemmalla ja oikealla nopeudella on ero,Suoraviivainen kävely on kompensoitu,Kauko -ohjaimen lineaarista poikkeaman korjaustoimintoa voidaan käyttää,Hienosäädä vasemman ja oikean pyörän nopeutta;
Korjausperiaate:Puolueellisuuden korjausfunktion kautta,Hienosäätö revolverinopeus,Saavuttaa sama nopeus kuin oikea pyörä,Ymmärtää vasemman ja oikean pyörän nopeuden synkronointi,Poista korvaukset;
Korjaustoimenpiteet:Manuaalitilassa,Pidä käyttöpainiketta painettuna,Kierrä "pienen moottorin nopeuden säätely";
Pyöriä myötäpäivään,Lisää revolverinopeuden jännitettä,Lisääntynyt poikkeaman korjausarvo näyttöön;
Kiertää vastapäivään,Vähennä revolverinopeuden jännitettä,Näytön poikkeaman korjausarvo laskee;
Korjausalue:Korjausarvo -90 -90;1Kunkin poikkeamankorjausyksikön esijännitteenjännitteen jännite on noin 0,02 V;
9、Parametrivalikko (käyttäjä kieltää yksityisen muutoksen)
Jotkut kaukosäätimen toiminnot voidaan säätää parametrien avulla,Manuaalitilassa,Kun pienen moottorin S2: n nopeus on 10,
Eteenpäin/käänteinen kytkin on taivutettu 3 kertaa peräkkäin,Rikko sitten se 3 kertaa peräkkäin,Syötä parametrivalikko;
Poistu parametrivalikosta:Valitse tallentaa tai ei,Paina sitten Enable -painiketta vahvistaaksesi poistumisen;
Enimmäisvirta:Leikkausmoottorin työvirta,Leikkausvirta on 80% tästä virrasta;
Nopeuden säätelyparametrit:Automaattiset leikkauksen ohjausparametrit,Oletus 800,Muutos on kielletty;
Hidastusparametrit:Automaattiset leikkauksen ohjausparametrit,Kun leikkausvirran muutosarvo ylittää tämän arvon,Alkaa hidastua
Kiihtyvyys A1: Automaattiset leikkauksen ohjausparametrit,Kun leikkausvirta on alhaisempi kuin asetettu leikkausvirta,Nopeuttaa hitaasti;
Hidastuvuus A2: Automaattiset leikkauksen ohjausparametrit,Kun leikkausvirta on korkeampi kuin asetettu leikkausvirta,Hitaasti nopeus;
Automaattinen veitsen kokoelma:virheellinen;
Aloita itselukin:0,Älä lukitse itseäsi;1,Itselukke. Paina Enable -näppäintä + eteenpäin ja kääntyäksesi voimaan,Ja lukita se;
Enimmäiskävely:Vähimmäismoottorin nopeus;
Leikkausvirta:Aseta päämoottorin enimmäisarvo automaattiseen leikkaukseen,Palautevirta ylittää tämän arvon,Alkaa hidastua;
Oletuksena nopeusrajoitus:Kun virta,Oletuksena automaattisen leikkausnopeuden maksiminopeus;
Automaattitila:0,Automaattinen kytkin on automaattinen ohjaus;1,Automaattinen kytkimen ohjaus automaattinen IO -lähtöpiste;
Nopeusrajoitus korvaus:Leikkaamalla automaattisesti,Pienen moottorin enimmäisnopeus;
Isäntä:Suuri moottorin enimmäisnopeus.
| Vastaanottimen käyttövirtalähde | DC24V/1A (riippumaton virtalähde) |
| Vastaanottimen lähtöpisteen kuorma | AC0-250V/3A DC0-30V/5A |
| Vastaanottimen nopeuden säätölähtöjännite |
DC0-10V
|