
Wire saw machine awtomatikong pagputol ng wireless remote control
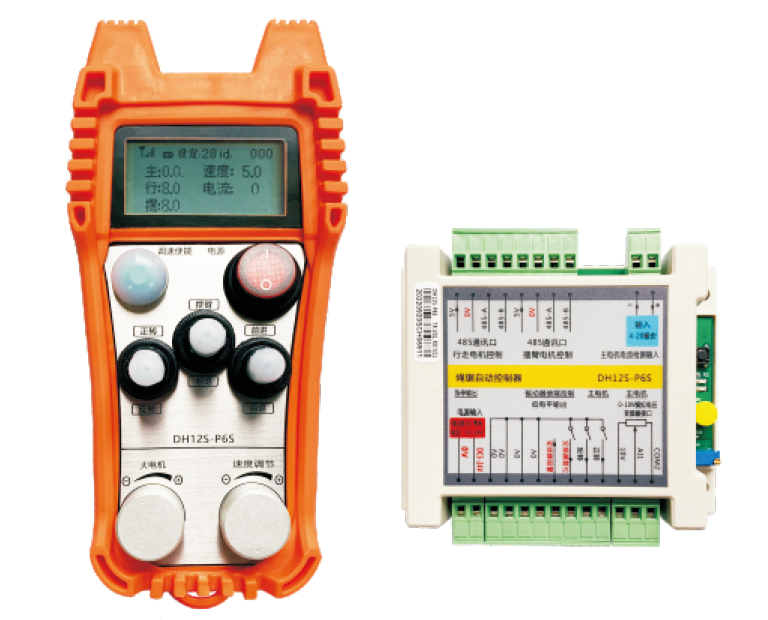
Awtomatikong paggupit ng wireless remote control ng wire saw machine DH12S-P6S
Paglalarawan


modelo:DH12S-P6S adapter equipment:Wire saw/blade saw machine


Pansinin:Tatlong uri ng mga antenna ang maaaring mapili,Ang default na suction cup antenna ay pamantayan


Pangunahing bilis ng motor:host:0-50
Bilis ng motor sa paglalakbay:OK:0-50
Automatic cutting travel motor maximum speed limit:bilis:0-30(Ang mga parameter ay nababagay)
Awtomatikong pagputol ng kasalukuyang setting ng pangunahing motor:set up:28(Ang mga parameter ay nababagay)
Bilis ng motor ng swing arm:ilagay:0-50

Mababang presyon:Ang baterya ng remote control ay masyadong mababa,Mangyaring palitan ang baterya

Mahulog sa internet:Pagkagambala sa wireless signal,Mangyaring suriin ang supply ng kuryente ng tatanggap,Kapangyarihan muli,I -restart ang remote control

1、Nakabukas ang remote control
Ang tatanggap ay pinapagana,Palaging naka-on ang D2 power light sa receiver,Ang ilaw ng signal ng D1 ay nagsisimulang kumikislap;Dalawang No. 5 na baterya na naka -install sa remote control,I -on ang switch ng kuryente,Ipakita ang bilis ng motor ng display,Nangangahulugan ito na matagumpay ang pagsisimula。
2、Pangunahing motor at regulasyon ng bilis
Pindutin nang matagal ang "Speed control enable",Lumiko ang switch na "pasulong/reverse" sa pasulong,Ang pangunahing motor ng receiver ay umiikot pasulong at lumiliko;
Pindutin nang matagal ang "Speed control enable",Lumiko ang switch na "pasulong/reverse" sa pasulong,Ang pangunahing motor ng receiver ay umiikot pasulong at lumiliko;
Pindutin nang matagal ang "Speed control enable",Lumiko ang "pasulong/reverse" switch upang baligtarin,Ang pangunahing motor ng receiver ay bumabaligtad at nag-on;
Ilipat lang ang switch sa gitna o pabalik,Agad na huminto ang main motor,Hindi na kailangang pindutin ang kontrol ng bilis upang paganahin;
Pindutin ang "Big Motor" knob,Ang receiver main motor inverter speed regulation boltahe ay maaaring iakma 0-10V;
3、Motor ng paglalakbay
3、Motor ng paglalakbay
Pindutin nang matagal ang "Speed control enable",Ilipat ang "forward/reverse" switch sa pasulong o paatras,Ang naglalakad na motor ay kikilos sa mataas na bilis na 50;
4、Swing arm motor at regulasyon ng bilis
I-on ang switch na "Swing Arm/Reverse" sa swing arm o reverse,Nagsisimula ang swing arm motor ng receiver;Pagkatapos ay i-on ang "Speed Adjustment" knob,Maaaring iakma ang bilis ng motor ng swing arm;
Pindutin nang matagal ang "Speed control enable",Pagkatapos ay i-flip ang switch na "swing arm/reverse".,Ang swing arm motor ay kikilos sa mataas na bilis na 50;
5、Pagsasaayos ng limitasyon ng bilis ng motor sa paglalakbay
Pindutin nang matagal ang "Speed Enable" na buton,Lumiko ang "Speed Adjustment" upang ayusin ang maximum na limitasyon ng bilis ng naglalakbay na motor sa panahon ng awtomatikong pagputol.;
6、Awtomatikong paggupit
Unang hakbang,Simulan ang pangunahing motor;Hakbang 2,Ayusin ang maximum na limitasyon ng bilis ng naglalakbay na motor;Hakbang 3,I-on ang "forward/reverse" switch para sumulong o paatras,Ipasok ang awtomatikong cutting mode;
7、Mga setting ng parameter (pinagbabawal ang mga user na baguhin ang mga ito nang pribado)
Ipasok ang menu ng parameter:Sa manu -manong mode,Kapag ang pangunahing bilis ng motor ay 0,Ang pasulong/reverse switch ay baluktot ng 3 beses sa isang hilera,Pagkatapos ay masira ito ng 3 beses sa isang hilera,Ipasok ang menu ng parameter;
Lumabas sa menu ng mga parameter:Pag-ikot ng page ng knob ng speed adjustment,Piliin kung i-save o hindi i-save,Kumpirmahin sa pamamagitan ng pagpindot sa pindutang paganahin;
Na-rate ang kasalukuyang:Pinakamataas na halaga ng pangunahing kasalukuyang motor,Yunit ng Ampere;
Mga parameter ng regulasyon ng bilis:Awtomatikong mga parameter ng control control,Default 800,Unit millisecond,Ipinagbabawal ang pagbabago;
Mga Parameter ng Deceleration:Kapag ang pagputol ng kasalukuyang halaga ng pagbabago ay lumampas sa halagang ito,Simulan ang mabilis na pag-decelerate,Yunit ng Ampere;
Acceleration A1:Kapag ang pagputol kasalukuyang ay mas mababa kaysa sa itinakdang kasalukuyang pagputol,Ang halaga ng bilis ay nadagdagan ng bawat acceleration ng walking motor;
Deceleration A2: Kapag ang pagputol kasalukuyang ay mas mataas kaysa sa itinakdang kasalukuyang pagputol,Ang halaga ng bilis ay nabawasan ng bawat deceleration ng walking motor;
Agos ng swing arm:default na halaga,Ipinagbabawal ang pagbabago;
huminto ang oras:Pagkatapos ng shutdown dahil sa kasalukuyang overload sa awtomatikong mode,Suriin muli ang kasalukuyang pagkatapos ng isang yugto ng panahon,Kung ito ay mas mababa sa itinakdang kasalukuyang,Awtomatikong simulan ang naglalakad na motor;Pangalawa ng unit,default na halaga,Ipinagbabawal ang pagbabago;
huminto ang oras:Pagkatapos ng shutdown dahil sa kasalukuyang overload sa awtomatikong mode,Suriin muli ang kasalukuyang pagkatapos ng isang yugto ng panahon,Kung ito ay mas mababa sa itinakdang kasalukuyang,Awtomatikong simulan ang naglalakad na motor;Pangalawa ng unit,default na halaga,Ipinagbabawal ang pagbabago;
Pinakamataas na kasalukuyang:Pangunahing motor feedback kasalukuyang saklaw,Yunit ng Ampere;
Pinakamataas na host:Remote control pangunahing hanay ng pagpapakita ng bilis ng motor;
Pinakamataas na paglalakad:Di-wastong parameter;
Bilis ng limitasyon ng bilis:Kapag awtomatikong pinuputol,Remote control display walking motor speed limit = 50% ng parameter na ito;
Magdagdag ng sensitivity:Kapag tumataas ang kasalukuyang feedback ng pangunahing motor,Sa tuwing tataas ang halaga nang higit sa halagang ito,Pagpapabilis ng motor sa paglalakbay;
Bawasan ang pagiging sensitibo:Kapag bumababa ang kasalukuyang feedback ng pangunahing motor,Sa bawat oras na bumababa ang halaga ng higit sa halagang ito,Pagbaba ng bilis ng motor sa paglalakbay;
Na-offset ang pagiging sensitibo:Offset increment para sa plus at minus na mga parameter ng sensitivity;
Itakda ang kasalukuyang:Awtomatikong paggupit,Threshold ng kasalukuyang feedback ng pangunahing motor,lumampas sa halagang ito,Nagsisimula nang bumagal ang naglalakad na motor;sa ibaba ng halagang ito,Nagsisimula nang bumilis ang naglalakad na motor;Yunit ng Ampere;
Itakda ang kasalukuyang:Awtomatikong paggupit,Threshold ng kasalukuyang feedback ng pangunahing motor,lumampas sa halagang ito,Nagsisimula nang bumagal ang naglalakad na motor;sa ibaba ng halagang ito,Nagsisimula nang bumilis ang naglalakad na motor;Yunit ng Ampere;
Walang laman na labasan:Kapag nagsimula ang awtomatikong mode,Kung ang kasalukuyang feedback ng pangunahing motor ay mas mababa sa halagang ito,ay nasa idling mode,mas malaki kaysa sa halagang ito,pagkatapos ay lumabas sa idling mode,Ipasok ang cutting mode,Yunit ng Ampere;
Walang-load na kasalukuyang:Kapag nagsimula ang awtomatikong mode,Kung ang kasalukuyang feedback ng pangunahing motor ay mas mababa sa halagang ito,ay nasa no-load mode,mas malaki kaysa sa halagang ito,pagkatapos ay lumabas sa no-load mode,Ipasok ang cutting mode,Yunit ng Ampere;
Bilis ng swing arm:Bilis ng startup ng swing arm motor;
cutting mode:Lumipat sa pagitan ng blade saw at wire saw mode,Pagkatapos lumipat, ang mga parameter ay lilipat din nang naaayon.;Sa blade saw mode,Ang isang swing arm motor ay idinagdag sa remote control display,Ang wire saw mode ay walang swing arm motor.;
Oras ng pag-debounce:Kapag ang pangunahing motor feedback kasalukuyang lumampas sa stop kasalukuyang,Patuloy na matutukoy ang kasalukuyang feedback,Ang oras ng pag-debounce ay ang tagal ng tuluy-tuloy na pag-detect na ito.,lumampas sa oras na ito,Alamin na ang pangunahing kasalukuyang motor ay lumalampas pa rin sa stop current,lakadHihinto ang motor;Kung hindi, ang naglalakad na motor ay patuloy na uusad;
itigil ang kasalukuyang:Ang pangunahing kasalukuyang feedback ng motor ay lumampas sa halagang ito,Hihinto ang motor sa paglalakbay;Yunit ng Ampere;
offset default:Ang paunang halaga ng limitasyon sa bilis ng paglalakad ng motor kapag naka-on ang remote control = 50% ng halagang ito;
![]()
| Tagatanggap ng Operating Power Supply |
DC24V/1A (Independent Power Supply)
|
| Ang pag -load ng output point ng receiver | AC0-250V/3A DC0-30V/5A |
| Ang boltahe ng regulasyon ng bilis ng receiver | DC0-10V |

Ang huling karapatan ng interpretasyon ng produktong ito ay pagmamay-ari ng Chengdu Core Synthetic Technology Co., Ltd.。





