
שלט רחוק אלחוטי חיתוך אוטומטי של מסור תיל
חיתוך אוטומטי שלט רחוק אלחוטי של מכונת מסור תיל DH12S-P6S
תֵאוּר


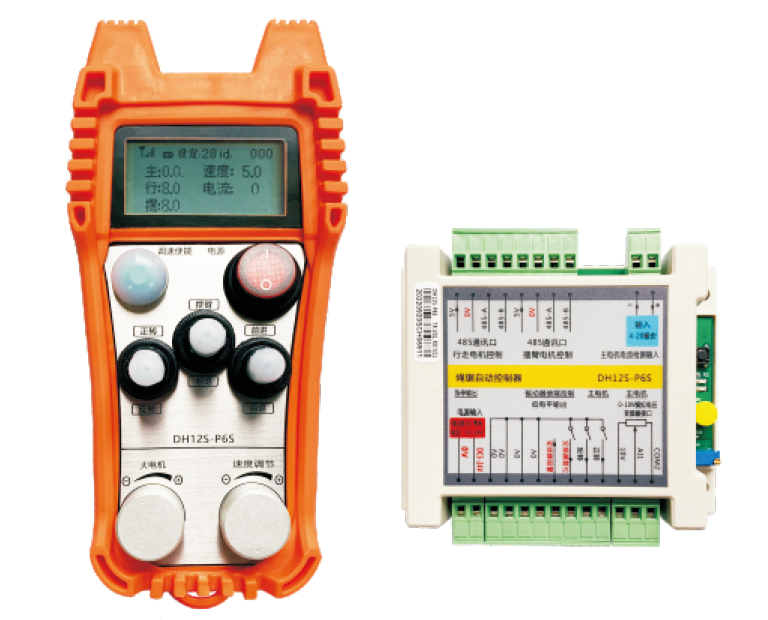
דֶגֶם:ציוד מתאם DH12S-P6S:מסור חוט/מכונת מסור להב


הֶעָרָה:ניתן לבחור שלושה סוגים של אנטנות,אנטנת כוס היניקה המוגדרת כברירת מחדל מצוידת בסטנדרט


מהירות מנוע עיקרית:מְאָרֵחַ:0-50
מהירות מנוע הולכת:בְּסֵדֶר:0-50
חיתוך אוטומטי מנוע הליכה מגבלת מהירות מקסימאלית:מְהִירוּת:0-30(הפרמטרים מתכווננים)
חיתוך אוטומטי מנוע מנוע מנועי:לְהַקִים:28(הפרמטרים מתכווננים)
מהירות מנוע זרוע נדנדה:לָשִׂים:0-50

לחץ נמוך:הסוללה של השלט הרחוק נמוכה מדי,אנא החלף את הסוללה

ליפול מהאינטרנט:הפרעה לאות אלחוטי,אנא בדוק את ספק הכוח המקלט,שובר שוב,הפעל מחדש את השלט הרחוק

1、שלט רחוק הופעל
המקלט מופעל,נורית אספקת החשמל D2 על המקלט תמיד פועלת,אור אות D1 מתחיל להבהב;שתי סוללות מס '5 המותקנות בשלט רחוק,הפעל את מתג ההפעלה,תצוגה תצוגה מהירות המנוע,זה אומר שהסטארט -אפ מצליח。
2、ויסות מנוע ומהירות עיקרי
לחץ והחזק "מהירות התאמת אפשרות",הפוך את המתג "קדימה/הפוך" לקדימה,המנוע הראשי של המקלט מופעל;
לחץ והחזק "מהירות התאמת אפשרות",הפוך את המתג "קדימה/הפוך" לקדימה,המנוע הראשי של המקלט מופעל;
לחץ והחזק "מהירות התאמת אפשרות",הפוך את מתג "קדימה/הפוך" להפך,היפוך מנוע ראשי מקלט ב;
הפוך את המתג ישירות לאמצע או הפוך,המנוע הראשי נעצר מייד,אין צורך ללחוץ על המהירות כדי לאפשר אותה;
סובב את ידית "המנוע הגדול",ניתן לכוונן את מתח ויסות המהירות של המהפך הראשי של המקלט 0-10V;
3、מנוע הליכה
3、מנוע הליכה
לחץ והחזק "מהירות התאמת אפשרות",הפוך את מתג "קדימה/הפוך" לקדימה או אחורה,מנוע ההליכה ינוע במהירות גבוהה של 50;
4、מנוע זרוע נדנדה ויסות מהירות
סובב את מתג "זרוע הנדנדה/חזרה" לזרוע הנדנדה או לאחור,מנוע הזרוע הנדנדה של המקלט מתחיל;ואז סובב את ידית "התאמת המהירות",יכול להתאים את מהירות מנוע הזרוע הנדנדה;
לחץ והחזק "מהירות התאמת אפשרות",סובב שוב את מתג "זרוע הנדנדה/נסיגה",מנוע זרוע הנדנדה ינוע במהירות גבוהה 50;
5、התאמת הגבלת מהירות של מנוע ההליכה
לחץ והחזק את לחצן "המהירות התאמת אפשרות",סיבוב "התאמת מהירות" יכול להתאים את מגבלת המהירות המרבית של מנוע ההליכה במהלך חיתוך אוטומטי;
6、חיתוך אוטומטי
צעד ראשון,התחל את המנוע הראשי;שלב 2,התאם את מגבלת המהירות המרבית של מנוע ההליכה;שלב 3,הפוך את מתג "קדימה/הפוך" קדימה או אחורה,הזן מצב חיתוך אוטומטי;
7、הגדרות פרמטרים (משתמשים אוסרים שינוי פרטי)
הזן את תפריט הפרמטרים:במצב ידני,כאשר מהירות המנוע העיקרית היא 0,מתג קדימה/הפוך כפוף 3 פעמים ברציפות,ואז לשבור אותו 3 פעמים ברציפות,הזן את תפריט הפרמטרים;
צא מהתפריט של הפרמטרים:עמוד כפתור כוונון מהירות,בחר לשמור או לא לשמור,לחץ על כפתור Enable כדי לאשר;
זרם מדורג:ערך מקסימלי של זרם מנוע ראשי,יחידה אמפר;
פרמטרים של ויסות מהירות:פרמטרים של בקרת חיתוך אוטומטית,ברירת מחדל 800,יחידת אלפיות השנייה,שינוי אסור;
פרמטרי האטה:כאשר ערך השינוי של זרם החיתוך עולה על ערך זה,התחל להאט במהירות,יחידה אמפר;
תאוצה A1:כאשר זרם החיתוך נמוך מזרם החיתוך של הסט,ערך המהירות עלה על ידי כל תאוצה של מנוע ההליכה;
האטה A2: כאשר זרם החיתוך גבוה מזרם החיתוך של הסט,ערך המהירות מופחת על ידי כל האטה של מנוע ההליכה;
זרם זרוע נדנדה:ערך ברירת מחדל,שינוי אסור;
זמן עצירה:לאחר הכיבוי עקב עומס יתר נוכחי במצב אוטומטי,בדוק את הזרם שוב לאחר פרק זמן,אם זה פחות מהזרם שנקבע,התחל אוטומטית את מנוע ההליכה;יחידה שנייה,ערך ברירת מחדל,שינוי אסור;
זמן עצירה:לאחר הכיבוי עקב עומס יתר נוכחי במצב אוטומטי,בדוק את הזרם שוב לאחר פרק זמן,אם זה פחות מהזרם שנקבע,התחל אוטומטית את מנוע ההליכה;יחידה שנייה,ערך ברירת מחדל,שינוי אסור;
זרם מקסימלי:טווח זרם מנוע מנועי עיקרי,יחידה אמפר;
מארח מקסימלי:שלט רחוק טווח תצוגות מהירות מנוע עיקרית;
הליכה מקסימאלית:פרמטר לא חוקי;
מגבלת מהירות קיזוז:בעת חיתוך אוטומטית,תצוגת שלט רחוק מגבלת מהירות מנוע מהלכת = 50% מהפרמטר הזה;
הוסף רגישות:כאשר זרם המשוב הראשי של המנוע גדל,בכל פעם שהערך עולה מעבר לערך זה,תאוצה מנועי נסיעות;
להפחית את הרגישות:כאשר זרם המשוב הראשי של המנוע יורד,בכל פעם שהערך יורד ביותר מערך זה,האטה מוטורית נסיעות;
קיזוז רגישות:קיזוז תוספת לפרמטרים לרגישות פלוס ומינוס;
הגדר זרם:חיתוך אוטומטי,סף זרם המשוב הראשי של המנוע,תעלה על ערך זה,מנוע ההליכה מתחיל להאט;מתחת לערך זה,מנוע ההליכה מתחיל להאיץ;יחידה אמפר;
הגדר זרם:חיתוך אוטומטי,סף זרם המשוב הראשי של המנוע,תעלה על ערך זה,מנוע ההליכה מתחיל להאט;מתחת לערך זה,מנוע ההליכה מתחיל להאיץ;יחידה אמפר;
יציאה ריקה:כאשר מצב אוטומטי מתחיל,אם זרם המשוב הראשי של המנוע הוא פחות מערך זה,נמצא במצב סרק,גדול מערך זה,ואז צא במצב סרק,הזן מצב חיתוך,יחידה אמפר;
ללא עומס זרם:כאשר מצב אוטומטי מתחיל,אם זרם המשוב הראשי של המנוע הוא פחות מערך זה,נמצא במצב ללא עומס,גדול מערך זה,ואז צא ממצב העומס,הזן מצב חיתוך,יחידה אמפר;
מהירות זרוע נדנדה:מהירות ההפעלה של מנוע זרוע נדנדה;
מצב חיתוך:מעבר בין מסור להב למצבי מסור תיל,לאחר המעבר, הפרמטרים יעברו גם הם בהתאם.;במצב מסור בלייד,מנוע זרוע נדנדה מתווסף לתצוגת השלט הרחוק,למצב מסור החוט אין מנוע זרוע נדנדה.;
זמן חוב:כאשר זרם המשוב הראשי של המנוע עולה על זרם העצירה,יגלה ברציפות את זרם המשוב,זמן ה- DebUnce הוא משך הגילוי הרציף הזה.,תעלה על הזמן הזה,זיהה כי זרם המנוע הראשי עדיין עולה על זרם העצירה,לָלֶכֶתהמנוע יפסיק;אחרת, מנוע ההליכה ימשיך להתקדם;
עצור זרם:זרם המשוב העיקרי של המנוע עולה על ערך זה,מנוע הנסיעות יפסיק;יחידה אמפר;
קיזוז ברירת מחדל:הערך הראשוני של מגבלת המהירות המוטורית ההליכה כאשר השלט הרחוק מופעל = 50% מערך זה;
![]()
| ספק כוח הפעלה מקלט |
DC24V/1A (אספקת חשמל עצמאית)
|
| עומס נקודת פלט מקלט | AC0-250V/3A DC0-30V/5A |
| מתח מהירות מקלט מתח יציאה | DC0-10V |

הזכות הסופית לפרש מוצר זה שייכת לצ'נגדו שינשאן טכנולוגיה ושות 'בע"מ.。





