
वायर आरा मशीन स्वचालित कटिंग वायरलेस रिमोट कंट्रोल
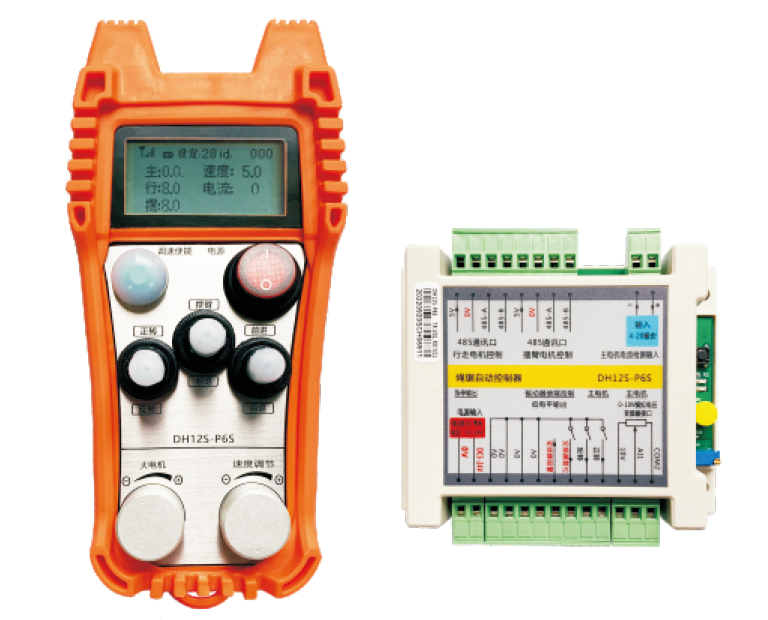
वायर आरा मशीन स्वचालित कटिंग वायरलेस रिमोट कंट्रोल DH12S-P6S
विवरण


नमूना:DH12S-P6S एडाप्टर उपकरण:तार आरा/ब्लेड आरा मशीन


टिप्पणी:तीन प्रकार के एंटेना का चयन किया जा सकता है,डिफ़ॉल्ट सक्शन कप एंटीना मानक है


मुख्य मोटर गति:मेज़बान:0-50
यात्रा मोटर गति:ठीक है:0-50
स्वचालित कटिंग ट्रैवल मोटर अधिकतम गति सीमा:रफ़्तार:0-30(पैरामीटर समायोज्य हैं)
स्वचालित कटिंग मुख्य मोटर सेटिंग करंट:स्थापित करना:28(पैरामीटर समायोज्य हैं)
स्विंग आर्म मोटर की गति:रखना:0-50

कम दबाव:रिमोट कंट्रोल की बैटरी बहुत कम है,कृपया बैटरी को बदलें

इंटरनेट से बाहर गिरना:वायरलेस सिग्नल रुकावट,कृपया रिसीवर बिजली की आपूर्ति की जाँच करें,फिर से पावर,रिमोट कंट्रोल को पुनरारंभ करें

1、रिमोट कंट्रोल चालू हो गया
रिसीवर पर संचालित होता है,रिसीवर पर D2 पावर लाइट हमेशा चालू रहती है,D1 सिग्नल लाइट चमकने लगती है;रिमोट कंट्रोल पर स्थापित दो नंबर 5 बैटरी,पावर स्विच चालू करें,प्रदर्शन प्रदर्शन मोटर गति,इसका मतलब है कि स्टार्टअप सफल है。
2、मुख्य मोटर और गति विनियमन
"गति नियंत्रण सक्षम करें" दबाकर रखें,आगे की ओर "फॉरवर्ड/रिवर्स" स्विच को चालू करें,रिसीवर की मुख्य मोटर आगे घूमती है और चालू हो जाती है;
"गति नियंत्रण सक्षम करें" दबाकर रखें,आगे की ओर "फॉरवर्ड/रिवर्स" स्विच को चालू करें,रिसीवर की मुख्य मोटर आगे घूमती है और चालू हो जाती है;
"गति नियंत्रण सक्षम करें" दबाकर रखें,रिवर्स में "फॉरवर्ड/रिवर्स" स्विच को चालू करें,रिसीवर मुख्य मोटर उलट जाती है और चालू हो जाती है;
बस स्विच को बीच में या उल्टा ले जाएँ,मुख्य मोटर तुरंत बंद हो जाती है,सक्षम करने के लिए गति नियंत्रण को दबाने की आवश्यकता नहीं है;
"बड़ी मोटर" घुंडी घुमाएँ,रिसीवर मुख्य मोटर इन्वर्टर गति विनियमन वोल्टेज को 0-10V समायोजित किया जा सकता है;
3、यात्रा मोटर
3、यात्रा मोटर
"गति नियंत्रण सक्षम करें" दबाकर रखें,"फॉरवर्ड/रिवर्स" स्विच को आगे या पीछे ले जाएँ,चलने वाली मोटर 50 की तेज गति से चलेगी;
4、स्विंग आर्म मोटर और गति विनियमन
"स्विंग आर्म/रिवर्स" स्विच को स्विंग आर्म या रिवर्स में बदलें,रिसीवर की स्विंग आर्म मोटर चालू होती है;फिर "स्पीड एडजस्टमेंट" नॉब को घुमाएं,स्विंग आर्म मोटर की गति को समायोजित किया जा सकता है;
"गति नियंत्रण सक्षम करें" दबाकर रखें,फिर "स्विंग आर्म/रिवर्स" स्विच को पलटें,स्विंग आर्म मोटर 50 की तेज गति से चलेगी;
5、यात्रा मोटर गति सीमा समायोजन
"स्पीड इनेबल" बटन को दबाकर रखें,स्वचालित कटिंग के दौरान यात्रा मोटर की अधिकतम गति सीमा को समायोजित करने के लिए "स्पीड एडजस्टमेंट" चालू करें।;
6、स्वत: कटौती
पहला कदम,मुख्य मोटर चालू करें;चरण दो,यात्रा मोटर की अधिकतम गति सीमा समायोजित करें;चरण 3,आगे या पीछे जाने के लिए "फॉरवर्ड/रिवर्स" स्विच चालू करें,स्वचालित कटिंग मोड दर्ज करें;
7、पैरामीटर सेटिंग्स (उपयोगकर्ताओं को उन्हें निजी तौर पर संशोधित करने से प्रतिबंधित किया गया है)
पैरामीटर मेनू दर्ज करें:मैनुअल मोड में,जब मुख्य मोटर की गति 0 हो,फॉरवर्ड/रिवर्स स्विच एक पंक्ति में 3 बार मुड़ा हुआ है,फिर इसे एक पंक्ति में 3 बार तोड़ें,पैरामीटर मेनू दर्ज करें;
पैरामीटर मेनू से बाहर निकलें:गति समायोजन घुंडी पृष्ठ मोड़,सहेजें या न सहेजें चुनें,सक्षम बटन दबाकर पुष्टि करें;
वर्तमान मूल्यांकित:मुख्य मोटर धारा का अधिकतम मान,यूनिट एम्पीयर;
गति विनियमन पैरामीटर:स्वत: कटिंग नियंत्रण पैरामीटर,डिफ़ॉल्ट 800,इकाई मिलीसेकंड,संशोधन निषिद्ध है;
डिक्लेरेशन पैरामीटर्स:जब कटिंग वर्तमान परिवर्तन मूल्य इस मान से अधिक हो जाता है,तेजी से गति कम करना शुरू करें,यूनिट एम्पीयर;
त्वरण ए 1:जब कटिंग करंट सेट कटिंग करंट से कम होता है,चलने वाली मोटर के प्रत्येक त्वरण से गति मान में वृद्धि हुई;
डेक्लेरेशन ए 2: जब कटिंग करंट सेट कटिंग करंट से अधिक होता है,चलने वाली मोटर की प्रत्येक मंदी से गति मान कम हो जाता है;
स्विंग आर्म करंट:डिफ़ॉल्ट मान,संशोधन निषिद्ध है;
समय रोकें:स्वचालित मोड में वर्तमान अधिभार के कारण शटडाउन के बाद,कुछ समय के बाद फिर से करंट की जाँच करें,यदि यह निर्धारित धारा से कम है,चलने वाली मोटर को स्वचालित रूप से चालू करें;यूनिट दूसरा,डिफ़ॉल्ट मान,संशोधन निषिद्ध है;
समय रोकें:स्वचालित मोड में वर्तमान अधिभार के कारण शटडाउन के बाद,कुछ समय के बाद फिर से करंट की जाँच करें,यदि यह निर्धारित धारा से कम है,चलने वाली मोटर को स्वचालित रूप से चालू करें;यूनिट दूसरा,डिफ़ॉल्ट मान,संशोधन निषिद्ध है;
अधिकतम वर्तमान:मुख्य मोटर फीडबैक वर्तमान रेंज,यूनिट एम्पीयर;
अधिकतम मेजबान:रिमोट कंट्रोल मुख्य मोटर स्पीड डिस्प्ले रेंज;
अधिकतम चलना:अमान्य पैरामीटर;
गति सीमा ऑफसेट:स्वचालित रूप से काटते समय,रिमोट कंट्रोल डिस्प्ले वॉकिंग मोटर गति सीमा = इस पैरामीटर का 50%;
संवेदनशीलता जोड़ें:जब मुख्य मोटर फीडबैक करंट बढ़ता है,हर बार मूल्य इस मूल्य से अधिक बढ़ जाता है,यात्रा मोटर त्वरण;
संवेदनशीलता कम करें:जब मुख्य मोटर फीडबैक करंट कम हो जाता है,हर बार मूल्य इस मूल्य से अधिक घट जाता है,यात्रा मोटर मंदी;
संवेदनशीलता ऑफसेट:प्लस और माइनस संवेदनशीलता मापदंडों के लिए ऑफसेट वृद्धि;
करेण्ट सेट करें:स्वत: कटौती,मुख्य मोटर फीडबैक करंट की सीमा,इस मान से अधिक,चलने वाली मोटर धीमी होने लगती है;इस मान से नीचे,चलने वाली मोटर तेज होने लगती है;यूनिट एम्पीयर;
करेण्ट सेट करें:स्वत: कटौती,मुख्य मोटर फीडबैक करंट की सीमा,इस मान से अधिक,चलने वाली मोटर धीमी होने लगती है;इस मान से नीचे,चलने वाली मोटर तेज होने लगती है;यूनिट एम्पीयर;
खाली निकास:जब स्वचालित मोड प्रारंभ होता है,यदि मुख्य मोटर फीडबैक करंट इस मान से कम है,निष्क्रिय अवस्था में है,इस मान से अधिक,फिर निष्क्रिय मोड से बाहर निकलें,कटिंग मोड दर्ज करें,यूनिट एम्पीयर;
नो-लोड करंट:जब स्वचालित मोड प्रारंभ होता है,यदि मुख्य मोटर फीडबैक करंट इस मान से कम है,नो-लोड मोड में है,इस मान से अधिक,फिर नो-लोड मोड से बाहर निकलें,कटिंग मोड दर्ज करें,यूनिट एम्पीयर;
हाथ घुमाने की गति:स्विंग आर्म मोटर स्टार्टअप गति;
काटने का तरीका:ब्लेड आरा और तार आरा मोड के बीच स्विच करें,स्विच करने के बाद, पैरामीटर भी तदनुसार स्विच हो जाएंगे।;ब्लेड आरा मोड में,रिमोट कंट्रोल डिस्प्ले में एक स्विंग आर्म मोटर जोड़ी जाती है,वायर सॉ मोड में स्विंग आर्म मोटर नहीं है।;
बहस का समय:जब मुख्य मोटर फीडबैक करंट स्टॉप करंट से अधिक हो जाता है,फीडबैक करंट का लगातार पता लगाएगा,डिबाउंस समय इस निरंतर पता लगाने की अवधि है।,इस बार से अधिक,पता लगाएं कि मुख्य मोटर करंट अभी भी स्टॉप करंट से अधिक है,टहलनामोटर बंद हो जायेगी;अन्यथा चलती हुई मोटर आगे बढ़ती रहेगी;
करंट रोकें:मुख्य मोटर फीडबैक करंट इस मान से अधिक है,यात्रा मोटर बंद हो जाएगी;यूनिट एम्पीयर;
ऑफसेट डिफ़ॉल्ट:रिमोट कंट्रोल चालू होने पर चलने वाली मोटर गति सीमा का प्रारंभिक मान = इस मान का 50%;
![]()
| प्राप्तकर्ता संचालन बिजली आपूर्ति |
DC24V/1A (स्वतंत्र बिजली की आपूर्ति)
|
| रिसीवर आउटपुट बिंदु भार | AC0-250V/3A DC0-30V/5A |
| रिसीवर गति विनियमन आउटपुट वोल्टेज | DC0-10V |

इस उत्पाद की व्याख्या करने का अंतिम अधिकार चेंगदू शिनशेन टेक्नोलॉजी कंपनी, लिमिटेड का है।。





