
Wireless chaw taws teeb tswj tsis siv neeg txiav cov hlau kaw
Tsis siv neeg txiav wireless chaw taws teeb tswj ntawm cov hlau kaw tshuab dh12s-p6s
Kev piav txog


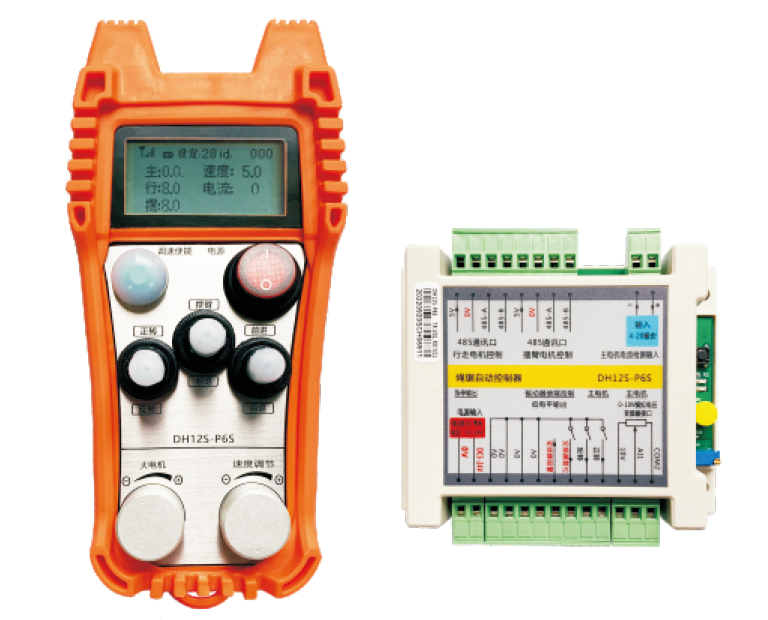
tus qauv:DH12S-P6S 适配设备:绳锯/片锯机


Hais txog:Peb hom kav hlau txais xov tuaj yeem xaiv tau,Lub neej ntawd suction khob kav hlau txais xov yog nruab nrog tus qauv


主电机速度:主:0-50
行走电机速度:行:0-50
自动切割行走电机最高限速:hov ceev:0-30(Cov tsis yog kho tau)
自动切割主电机设定电流:设定:28(Cov tsis yog kho tau)
摆臂电机速度:摆:0-50

Tsis tshua muaj siab:Lub roj teeb ntawm cov chaw taws teeb tswj tau qis dhau,Thov hloov lub roj teeb

Poob tawm hauv is taws nem:Wireless teeb liab cuam tshuam,Thov txheeb xyuas cov khoom siv fais fab tuag,Lub hwj chim dua,Rov qab pib tswj chaw taws teeb

1、Chaw taws teeb tswj tig
Tus txais yog muaj hwj chim rau,接收器上D2电源灯常亮,D1信号灯开始闪烁;Ob qho tsis muaj 5 roj teeb ntsia rau ntawm cov chaw taws teeb,Qhib lub hwj chim hloov,Muab cov zaub muaj lub tshuab tsav ceev,Nws txhais tau tias qhov pib pib ua tiav。
2、主电机和调速
按住“调速使能”,Tig lub "Forward / rov qab" hloov mus rau pem hauv ntej,接收器主电机正转打开;
按住“调速使能”,Tig lub "Forward / rov qab" hloov mus rau pem hauv ntej,接收器主电机正转打开;
按住“调速使能”,Tig lub "Forward / rov qab" hloov rov qab,接收器主电机反转打开;
直接将开关扳到中间或者反向,主电机立即停止,无需按调速使能;
旋转“大电机”旋钮,可以调节接收器主电机变频器调速电压0-10V;
3、行走电机
3、行走电机
按住“调速使能”,将“前进/后退”开关扳到前进或者后退,行走电机将以高速50进行移动;
4、摆臂电机和调速
将“摆臂/后退”开关扳到摆臂或者后退,接收器的摆臂电机启动;然后旋转“速度调节”旋钮,可以调节摆臂电机速度;
按住“调速使能”,再扳动“摆臂/后退”开关,摆臂电机将以高速50移动;
5、行走电机限速调整
按住“调速使能”按钮,旋转“速度调节”可以调整自动切割时行走电机的最大限速;
6、Tsis Siv Neeg Txiav
thawj kauj ruam,启动主电机;Kauj ruam 2,调整行走电机的最大限速;Kauj ruam 3,将“前进/后退”开关扳动前进或者后退,进入自动切割模式;
7、参数设置(用户禁止私自修改)
Sau cov ntawv qhia zaub mov parameter:Hauv phau ntawv hom,在主电机速度为0时,Forward / Rov Qab Hloov yog khoov li 3 zaug uake,Tom qab ntawd rhuav nws 3 zaug uake,Sau cov ntawv qhia zaub mov parameter;
Tawm ntawm cov ntawv qhia zaub mov:速度调节旋钮翻页,选择保存或不保存,按使能按钮确认;
额定电流:主电机电流的最大值,单位安培;
Kev tswj ceev ceev:Tsis Siv Neeg Txiav Tswj Xyuas,Defauld 800,单位毫秒,Kev hloov kho yog txwv tsis pub;
Deceleration tsis:Thaum tus txiav tam sim no hloov tus nqi tshaj tus nqi no,开始急速减速,单位安培;
Kev nrawm A1:Thaum qhov txiav tam sim no qis dua qhov teeb txiav tam sim no,行走电机每次加速增加的速度值;
Deceleration A2: Thaum qhov txiav tam sim no siab dua cov teeb txiav tam sim no,行走电机每次减速减少的速度值;
摆臂电流:默认值,Kev hloov kho yog txwv tsis pub;
停止时间:自动模式电流超载停机后,隔一段时间再次检测电流,如果小于设定电流,自动启动行走电机;单位秒,默认值,Kev hloov kho yog txwv tsis pub;
停止时间:自动模式电流超载停机后,隔一段时间再次检测电流,如果小于设定电流,自动启动行走电机;单位秒,默认值,Kev hloov kho yog txwv tsis pub;
Qhov siab tshaj plaws:主电机反馈电流的范围,单位安培;
Siab Tshaj Lej:遥控器主电机调速显示范围;
Qhov siab tshaj plaws taug kev:无效参数;
Kev Ceev Tshaj Tawm Offset:Thaum txiav cia li,遥控器显示屏行走电机限速=此参数的50%;
加灵敏度:主电机反馈电流增大时,每次增大的值超过此值,行走电机加速;
减灵敏度:主电机反馈电流减小时,每次减小的值超过此值,行走电机减速;
灵敏度偏移:加和减灵敏度参数的偏移增加量;
设定电流:Tsis Siv Neeg Txiav,主电机反馈电流的门限,超过此值,行走电机开始减速;低于此值,行走电机开始加速;单位安培;
设定电流:Tsis Siv Neeg Txiav,主电机反馈电流的门限,超过此值,行走电机开始减速;低于此值,行走电机开始加速;单位安培;
空走退出:自动模式开始时,如果主电机反馈电流小于此值,则处于空走模式,大于此值,则退出空走模式,进入切割模式,单位安培;
空载电流:自动模式开始时,如果主电机反馈电流小于此值,则处于空载模式,大于此值,则退出空载模式,进入切割模式,单位安培;
摆臂速度:摆臂电机开机初始速度;
切割模式:片锯和绳锯两种模式切换,切换后参数也对应切换;片锯模式下,遥控器显示屏增加摆臂电机,绳锯模式则没有摆臂电机;
去抖时间:主电机反馈电流超过停止电流时,将持续检测反馈电流,去抖时间就是这个持续检测的时长,超过这个时间,检测主电机电流依然超过停止电流,行走电机将停止;反之则行走电机会继续前进;
停止电流:主电机反馈电流超过此值,行走电机将停止;单位安培;
偏移默认:遥控器开机时行走电机限速的初始值=此值的50%;
![]()
| Tau txais kev ua haujlwm fais fab mov |
DC24V / 1A (Kev Nyab Xeeb Khoom Siv Hluav Taws Xob)
|
| Tau txais cov zis point load | AC0-250V/3A DC0-30V/5A |
| Tus txais kev tswj hwm kev tawm TV ceev | DC0-10V |

Txoj cai kawg ntawm kev txhais cov khoom no belongs rau Chengdu Core Synthetic Technology Co., Ltd.。




