
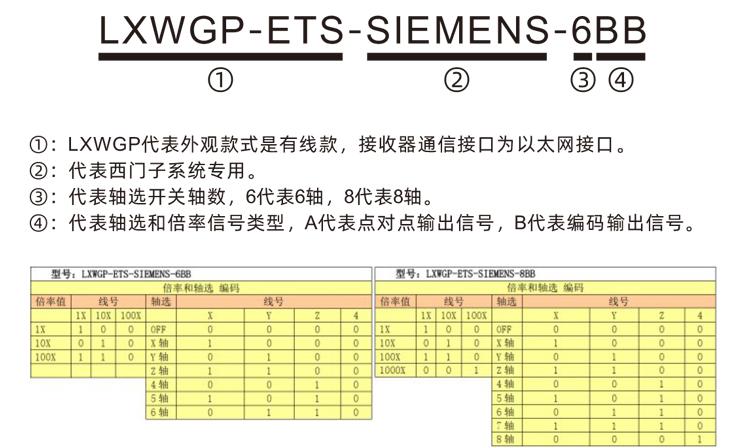
LxWgp-ets-Siemens Wired Electronic Handwheel
Kev piav txog


Electronic handwheel yog siv rau phau ntawv qhia ntawm CNC tshuab cuab yeej、chaw nyob、Kev ua haujlwm tawm tsam。Cov qauv ntawm cov khoom siv hluav taws xob no yog Siemens wired electronic handwheel nrog cov zaub tiag.,Lub handwheel txuas nrog X130 interface ntawm Siemens system los ntawm lub network cable.,Nyeem cov kab ke tswj hwm thiab muab tso rau hauv LCD zaub ntawm tes los ntawm S7 raws tu qauv kev sib txuas lus.,Thiab lub handwheel tswj system axis xaiv tuaj yeem ua los ntawm kev sib txuas lus.、ua kom dav、Khawm thiab lwm yam teeb liab。

1.Txuas siv 6-core aviation plug cable,Handwheel cable ntev 10 meters。
2.Lub handwheel screen tuaj yeem tso saib qhov system workpiece coordinates、Mechanical coordinates、Pub ceev、Axis xaiv、Cov ntaub ntawv xws li magnification。
3.Txhawb Nqa Xwm Ceev,Hloov kom muaj nuj nqis IO teeb liab tawm,Handwheel shutdown thaum muaj xwm ceev nres tseem siv tau。
4.Txhawb 6 kev cai khawm,Hloov io teeb liab,Muaj peev xwm tso tawm cov cim rau lub kaw lus los ntawm IO thaiv lossis kev sib txuas lus。
5.Txhawb 6 lossis 8 axis tswj,Hloov io teeb liab,Muaj peev xwm tso tawm cov cim rau lub kaw lus los ntawm IO thaiv lossis kev sib txuas lus。
6.Txhawb nqa 3 lossis 4 qib ntawm kev tswj kom zoo,Hloov io teeb liab,Muaj peev xwm tso tawm cov cim rau lub kaw lus los ntawm IO thaiv lossis kev sib txuas lus。
7.TXHAWJ ECODER,100Mem tes / vajvoog,Lub teeb liab tuaj yeem tso tawm rau qhov system los ntawm AB pulse thaiv.。
8.Txhawb Siemens S7 Raws Cai,Txhawb Siemens 828D、840DSL、IB thiab lwm yam qauv。

| Handwheel ua hauj lwm fais fab mov voltage | DC 24V / 1A |
| Tau Txais Hluav Taws Xob Hluav Taws Xob | DC 24V / 1A |
| Txais IO tso zis ntau yam |
DC 24 V
|
| Handwheel kawg cable ntev |
10m
|
| Receiver kawg cable ntev |
1m
|
| Receiver kawg network cable ntev |
3m
|
| Kev khiav hauj lwm kub |
-25℃<X<55℃
|
| Anti-poob siab |
1m
|
| Customize tus naj npawb ntawm khawm | 6kev xav tsis thoob |
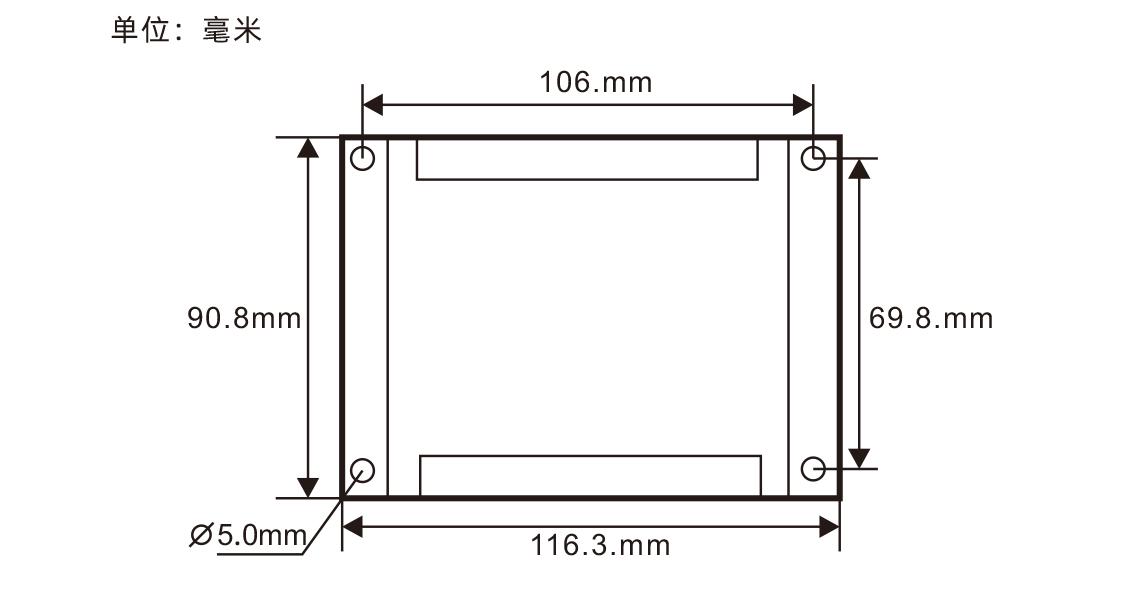
| Cov khoom loj | 233*90.7*77.4(Hli) |


Lus:
①ل Clock Khawm:
Nias lub khawm thaum muaj xwm ceev,Ob pab pawg ntawm kev kub ntxhov nres IO tawm ntawm tus txais kev ua txhaum,Thiab tag nrho cov haujlwm ntawm cov tes tsis raug。
Tom qab cov khoom nres tsheb thaum muaj xwm ceev,Nres tsheb nres Io Cov zis kaw rau ntawm tus txais,Txhua txoj haujlwm ntawm cov tes tau rov qab。
②screen zaub:
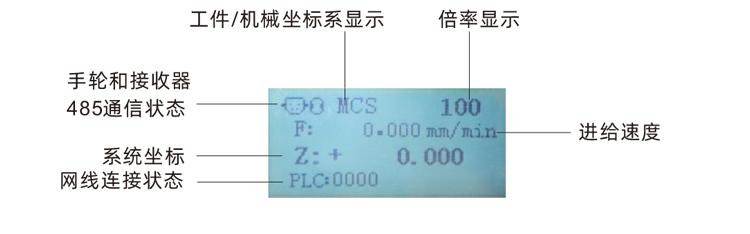
PLC:0000Nws txhais tau hais tias lub network cable tsis txuas nrog,PLC:1010Nws txhais tau hais tias lub network cable thiab PLC system txuas nrog ua tiav.,
PLC:1110Qhia tau hais tias lub handwheel sau cov ntaub ntawv system tiav.,PLC:0001Qhia tau hais tias kev sib raug zoo rau lub computer。
③Custom nyees khawm:
6Kev cai khawm,Txhua lub khawm sib raug rau IO tso zis taw tes rau ntawm tus txais,Kuj txuas nrog lub system los ntawm kev sib txuas lus。
Oaxis xaiv lub pob hloov:
Hloov cov Axis xaiv hloov tuaj yeem hloov cov txav mus rau Axis tswj hwm los ntawm Handwheel。
⑤ Qhib khawm:
Nias thiab tuav ib qho khoom siv uas muaj zog ntawm ob sab,Cov co pob zeb scyoder yog lub txiaj ntsig。 Thiab ob pab pawg ntawm tus tau txais kev pab kom io tsim tawm,Tso Tawm Lub khawm,Pab kom Io Tawm Tawm Disconnection。
⑥ Magnification hloov:
Hloov lub tsom iav hloov kom hloov lub zog tswj tau los ntawm kev ua haujlwm。
⑦ Pulse encoder:
Nias thiab tuav lub pob qhib,Mem Tes Encoder,Xa daim phiaj teeb mem tes,Tswj lub tshuab ncej qaum。
⑧ Tes log cable:
Cable txuas handwheel thiab receiver,aviation plug,Rau handwheel fais fab mov thiab kev sib txuas lus。



6.1Cov Khoom Siv Cov Khoom Siv Installation
1.Nruab lub receiver nyob rau hauv lub txee hluav taws xob los ntawm cov ntsia hlau qhov ntawm plaub fab.。
2.Xa mus rau peb cov ntawv txais nyiaj xoos,Piv koj cov khoom siv hauv thaj chaw,Txuas lub cuab yeej los ntawm cable thiab receiver
txuas,Siv lub network cable los txuas lub receiver mus rau X130 interface ntawm lub kaw lus。
3.Tom qab tus txais yog tsau,Nruab lub aviation plug puag rau hauv lub handwheel qhib ntawm lub vaj huam sib luag,Lwm lub hauv paus
Lub davhlau ya nyob twg strip yog ntsaws rau hauv lub handwheel interface ntawm lub receiver.。Tom qab ntawd ntxig lub aviation plug ntawm handwheel kawg cable rau hauv lub hauv paus,Tighten
khoom siv。
6.2Tau txais kev teeb tsa loj
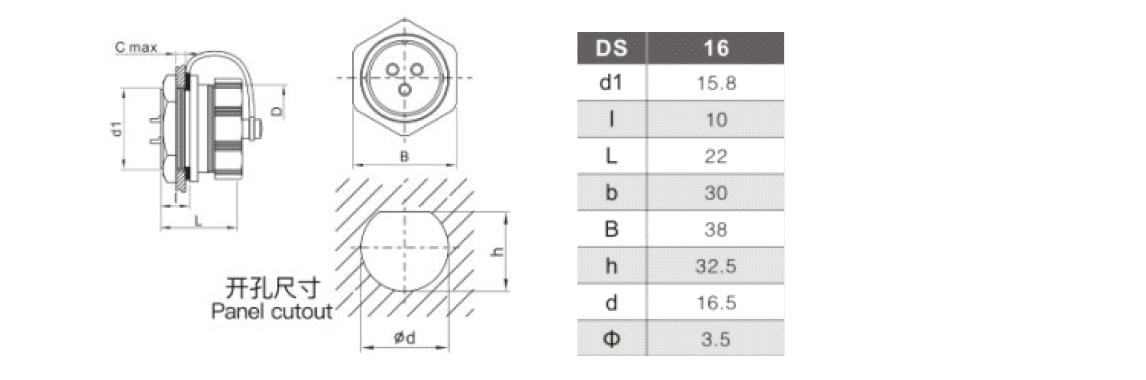
6.3Aviation plug installation qhov ntev
6.4Tus txais ntaub ntawv siv tshuaj lom neeg siv

6.2Tau txais kev teeb tsa loj
6.3Aviation plug installation qhov ntev
6.4Tus txais ntaub ntawv siv tshuaj lom neeg siv

1.Tus txais yog muaj hwj chim rau,Tus txais kev ua haujlwm lub teeb yog nyob,Txuas lub receiver rau lub computer siv ib tug network cable,Teem ib qhov chaw nyob IP ruaj rau koj lub computer,Siv lub network configuration tool software los teeb lub network tsis rau lub handwheel muaj nuj nqi,Tej chaw tshwj xeeb
Rau txoj kev, thov mus saib "Cov Lus Qhia rau Kev Siv LXWGP-ETS Wired Handwheel"。
2.Tom qab kev teeb tsa receiver tiav,Lub kaw lus xav tau kev pab cuam PLC program,Yog xav paub ntxiv, thov xa mus rau "LXWGP-ETS Kev Teeb Meem rau Sib Txawv Siemens CNC Systems" thiab PLC cov ntaub ntawv niaj hnub ua haujlwm。
3.Tom qab cov kev teeb tsa saum toj no ua tiav,Nqa lub receiver mus rau lub tshuab hluav taws xob txee thiab nruab nws,Unplug lub network cable los ntawm lub computer thiab ntsaws rau hauv X130 interface ntawm lub kaw lus,Txuas lub receiver fais fab thiab mem tes xov hlau。
4.Lub tshuab siv lub zog,Tus txais yog muaj hwj chim rau,Tus txais kev ua haujlwm lub teeb yog nyob,Tig rau lub tes tuav lub hwj chim hloov,Handwheel screen khau raj,PLC kov npo:1010,Qhia tau hais tias kev sib txuas lus zoo ntawm tes thiab lub kaw lus.。
5.Xaiv axis xaiv:Hloov Qag Xaiv Hloov,Xaiv cov Axis koj xav ua haujlwm。
6.Xaiv cov hmoov ntau:Hloov lub tsom iav hloov,Xaiv cov ntau koj xav tau。
7.Tshem cov axis:Nias thiab tuav lub pob qhib,Xaiv cov axis thiab hloov,Xaiv cov kev hloov pauv ntau,Tom qab ntawd tig cov mem tes encoder,Tig clockwise rau yav tom ntej,Tig lub zog tsis zoo axis counterclockwise。
8.Nias thiab tuav ib qho kev cai khawm,Lub khawm sib raug Io tawm ntawm tus txais yog muab,Tso Tawm khawm Tawm Kaw。
9.Nias lub khawm thaum muaj xwm ceev,Tus txais qhov kev txiav tawm uas cov xwm txheej ceev nres Io tawm,Handwheel ua haujlwm tsis ua tiav,Tso Tawm Lub Pob Ceev,Nres tsheb nres Io Tso Tawm Kaw,Handwheel ua haujlwm rov ua haujlwm。


| Txhaum qhov xwm txheej | Ua tau |
Kev daws teeb meem
|
|
|
Kev daws teeb meem
|
1.Seb lub aviation cable nruab nrab ntawm lub handwheel thiab receiver yog kev cob cog rua kom raug thiab ntseeg tau
2.Puas yog lub receiver fais fab voltage txaus?
3.Handwheel tsis ua hauj lwm
|
1.Txheeb xyuas qhov kev sib txuas ntawm aviation cable ntawm tes thiab lub receiver
2.Xyuas lub receiver input zog
3.Hu rau lub chaw tsim khoom xa rov qab mus rau lub Hoobkas rau kev saib xyuas
|
|
| Tsis muaj lus teb thaum ua haujlwm ntawm tes |
1.Puas yog lub network cables ntawm lub receiver thiab system txuas?
2.Puas yog qhov system PLC program sau tau zoo?
3.Puas yog lub receiver configuration teem raug?
4.Puas yog 485 kev sib txuas lus icon tshwm rau ntawm lub log tsheb ua tsis tiav?
5.Thaum ua haujlwm ntawm Handwheel,Koj yuav tsum nias thiab tuav cov nyees khawm ntawm ob sab
6.Puas yog lub khawm nres thaum muaj xwm ceev tso tawm?
|
1.Xyuas seb lub receiver thiab system X130 network chaw nres nkoj puas txuas nrog lub network cable
2.Xyuas thiab paub meej tias lub kaw lus PLC puas raug sau raws li cov ntaub ntawv siv peb tau muab.
3.Xyuas seb tus neeg txais yuav xa mus rau peb cov ntaub ntawv thiab muab cov cuab yeej software,Kho qhov teeb meem network thiab DB chaw nyob ntawm tus txais, thiab lwm yam.
4.Tshawb xyuas ntawm tes thiab lub receiver
6core ntsuab qhov (socket).,Ob txoj kab kev sib txuas lus:485-A thiab 485-B,Puas yog nws raug thiab ruaj ntseg txuas?,Puas muaj Circuit Court break?
|
|
|
Tom qab tus tau txais lub zog rau,Lub teeb ua haujlwm ntawm lub receiver tsis teeb
|
1.Fais fab mov txawv txav
2.Lub Hwj Chim Hlau Yuam Kev
3.Tus txais kev ua tsis tiav
|
1.Kuaj xyuas yog lub zog fais fab muaj voltage,
Puas yog voltage ntsib qhov yuav tsum tau ua
2.Kuaj seb puas muaj qhov zoo thiab tsis zoo ntawm lub zog hluav taws xob txuas nrog hauv qab
3.Rov qab mus rau lub Hoobkas txij nkawm
|

1.Thov nyob rau hauv chav tsev kub thiab siab,Siv nyob rau hauv cov chaw qhuav,Txuas Kev Pab Lub Neej。
2.Thov zam kom tsis txhob ntub dej hauv cov nag、Siv nyob rau hauv ib puag ncig txawv txav xws li hlwv,Txuas Kev Pab Lub Neej。
3.Thov khaws cov tes ntxuav tes,Txuas Kev Pab Lub Neej。
4.Thov zam tsis txhob muab cia、Poob、Tsoo, thiab lwm yam.,Tiv thaiv kom tiv thaiv precision accessories sab hauv lub tes tau los ntawm kev puas tsuaj lossis raug yuam kev。
5.Tsis siv rau lub sijhawm ntev,Thov khaws cov tes ua kom huv thiab nyab xeeb。
6.Them sai sai rau cov dej noo-pov thawj thiab poob siab-pov thawj thaum lub sijhawm cia thiab tsheb thauj mus los。

1.Thov nyeem cov lus qhia rau siv kom meej ua ntej siv,Cov neeg ua haujlwm tsis yog neeg tshaj lij yog txwv tsis pub。
2.Tom qab ib qho xwm txheej txawv txav tshwm sim nyob rau hauv lub handwheel,Thov txhob siv tam sim ntawd,thiab daws teeb meem,Ua ntej kev daws teeb meem,Nws yog txwv tsis pub siv lub faulty handwheel dua,Zam kev nyab xeeb xwm txheej vim tsis paub txog lub log tsis ua haujlwm;
3.Yog tias yuav tsum tau kho kho,Thov hu rau cov chaw tsim khoom,Yog tias kev puas tsuaj los ntawm kev kho tus kheej,Cov chaw tsim khoom yuav tsis muaj kev tiv thaiv。
-500x650.png)

.png)


