
Մետաղական սղոց մեքենա ավտոմատ կտրող անլար հեռակառավարման վահանակ
Լարային սղոցի մեքենայի ավտոմատ կտրող անլար վերահսկողություն DH12S-P6S
Նկարագրություն


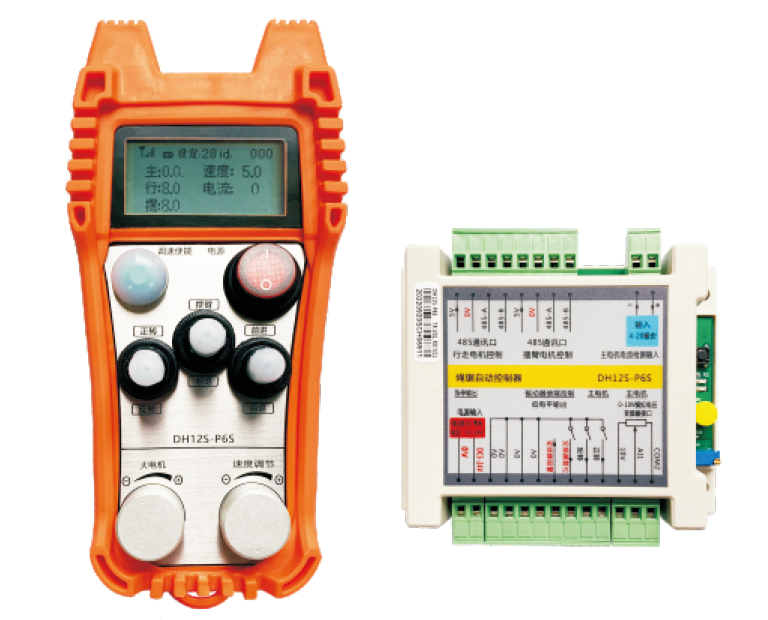
մոդել:DH12S-P6S ադապտեր սարքավորում:Մետաղական սղոց / սղոց սղոց մեքենա


Դիտողություն:Կարող են ընտրվել երեք տեսակի ալեհավաքներ,Լռելյայն ներծծման բաժակի ալեհավաքը հագեցած է ստանդարտով


Հիմնական շարժիչի արագությունը:հյուրընկալող:0-50
Ճանապարհորդական շարժիչի արագություն:Լավ:0-50
Ավտոմատ կտրող ճանապարհորդական շարժիչի առավելագույն արագության սահմանը:արագություն:0-30(Պարամետրերը կարգավորելի են)
Ավտոմատ կտրում հիմնական շարժիչի կարգավորման հոսանքը:ստեղծել:28(Պարամետրերը կարգավորելի են)
Swing arm շարժիչի արագությունը:դնել:0-50

Ցածր ճնշում:Հեռակառավարման մարտկոցը չափազանց ցածր է,Խնդրում ենք փոխարինել մարտկոցը

Ընկնել ինտերնետից:Անլար ազդանշանի ընդհատում,Խնդրում ենք ստուգել ստացողի էլեկտրամատակարարումը,Իշխանությունը կրկին,Վերագործարկեք հեռակառավարումը

1、Հեռակառավարումը միացված է
Ստացողը սնուցվում է,Ստացողի վրա D2 հոսանքի լույսը միշտ միացված է,D1 ազդանշանային լույսը սկսում է թարթել;Հեռակառավարման վրա տեղադրված երկու թիվ 5 մարտկոց,Միացրեք էլեկտրական անջատիչը,Display ուցադրման էկրանի արագությունը,Դա նշանակում է, որ սկսնակը հաջող է。
2、Հիմնական շարժիչի և արագության կարգավորում
Սեղմեք և պահեք «Արագության կառավարումը միացնել»,Միացրեք «առաջ / հակադարձ» անցումը դեպի առաջ,Ստացողի հիմնական շարժիչը պտտվում է առաջ և միանում;
Սեղմեք և պահեք «Արագության կառավարումը միացնել»,Միացրեք «առաջ / հակադարձ» անցումը դեպի առաջ,Ստացողի հիմնական շարժիչը պտտվում է առաջ և միանում;
Սեղմեք և պահեք «Արագության կառավարումը միացնել»,Անջատեք «առաջ / հակադարձ» անջատիչը `հակադարձելու համար,Ընդունիչի հիմնական շարժիչը շրջվում և միանում է;
Պարզապես տեղափոխեք անջատիչը դեպի մեջտեղը կամ հակառակը,Հիմնական շարժիչը անմիջապես կանգ է առնում,Կարիք չկա սեղմել արագության հսկողությունը միացնելու համար;
Պտտեք «Մեծ շարժիչի» կոճակը,Ընդունիչի հիմնական շարժիչի ինվերտորի արագության կարգավորման լարումը կարող է կարգավորվել 0-10 Վ;
3、Ճանապարհորդական շարժիչ
3、Ճանապարհորդական շարժիչ
Սեղմեք և պահեք «Արագության կառավարումը միացնել»,Տեղափոխեք «առաջ/հետ» անջատիչը առաջ կամ հետ,Քայլող շարժիչը կշարժվի 50 բարձր արագությամբ;
4、Swing arm շարժիչ և արագության կարգավորում
Պտտեք «Swing Arm/Reverse» անջատիչը ճոճվող թևի կամ հետընթացի,Միանում է ընդունիչի ճոճվող թեւի շարժիչը;Այնուհետև պտտեք «Արագության ճշգրտում» կոճակը,Swing arm շարժիչի արագությունը կարող է ճշգրտվել;
Սեղմեք և պահեք «Արագության կառավարումը միացնել»,Այնուհետև շրջեք «swing arm/reverse» անջատիչը,Ճոճվող թեւի շարժիչը կշարժվի 50 բարձր արագությամբ;
5、Ճանապարհորդական շարժիչի արագության սահմանաչափի ճշգրտում
Սեղմեք և պահեք «Speed Enable» կոճակը,Պտտեք «Speed Adjustment»-ը՝ ավտոմատ կտրման ժամանակ շրջող շարժիչի առավելագույն արագության սահմանաչափը կարգավորելու համար:;
6、Ավտոմատ կտրում
Առաջին քայլ,Միացրեք հիմնական շարժիչը;Քայլ 2,Կարգավորեք շրջող շարժիչի առավելագույն արագության սահմանը;Քայլ 3,Պտտեք «առաջ/հետ» անջատիչը՝ առաջ կամ հետ շարժվելու համար,Մուտք գործեք ավտոմատ կտրման ռեժիմ;
7、Պարամետրերի կարգավորումներ (օգտատերերին արգելվում է դրանք մասնավոր կերպով փոփոխել)
Մուտքագրեք պարամետրերի ընտրացանկը:Ձեռքով ռեժիմում,Երբ հիմնական շարժիչի արագությունը 0 է,Փոխանցել / հակառակ անջատիչը անընդմեջ 3 անգամ թեքվում է,Այնուհետեւ կոտրեք այն 3 անգամ անընդմեջ,Մուտքագրեք պարամետրերի ընտրացանկը;
Ելեք պարամետրերի ընտրացանկից:Արագության ճշգրտման կոճակի էջի շրջում,Ընտրեք պահպանել կամ չպահել,Հաստատեք՝ սեղմելով միացնել կոճակը;
Գնահատված հոսանք:Հիմնական շարժիչի հոսանքի առավելագույն արժեքը,Միավոր Ամպեր;
Արագության կարգավորման պարամետրեր:Ավտոմատ կտրման կառավարման պարամետրեր,Լռելյայն 800,Միավոր միլիվայրկյան,Փոփոխությունն արգելվում է;
Դափնեցման պարամետրեր:Երբ կտրված ընթացիկ փոփոխության արժեքը գերազանցում է այս արժեքը,Սկսեք արագ դանդաղեցնել,Միավոր Ամպեր;
Արագացում A1:Երբ կտրող հոսանքը ցածր է, քան սահմանված կտրող հոսանքը,Արագության արժեքը ավելացել է քայլող շարժիչի յուրաքանչյուր արագացումով;
Deleqeration A2: Երբ կտրող հոսանքը ավելի բարձր է, քան սահմանված կտրող հոսանքը,Արագության արժեքը նվազեցվում է քայլող շարժիչի յուրաքանչյուր դանդաղեցմամբ;
Ճոճվող թեւի հոսանքը:լռելյայն արժեք,Փոփոխությունն արգելվում է;
կանգառի ժամանակը:Ավտոմատ ռեժիմում ընթացիկ ծանրաբեռնվածության պատճառով անջատումից հետո,Որոշ ժամանակ անց նորից ստուգեք հոսանքը,Եթե այն փոքր է սահմանված հոսանքից,Ավտոմատ կերպով միացրեք քայլող շարժիչը;Միավոր երկրորդ,լռելյայն արժեք,Փոփոխությունն արգելվում է;
կանգառի ժամանակը:Ավտոմատ ռեժիմում ընթացիկ ծանրաբեռնվածության պատճառով անջատումից հետո,Որոշ ժամանակ անց նորից ստուգեք հոսանքը,Եթե այն փոքր է սահմանված հոսանքից,Ավտոմատ կերպով միացրեք քայլող շարժիչը;Միավոր երկրորդ,լռելյայն արժեք,Փոփոխությունն արգելվում է;
Առավելագույն հոսանք:Հիմնական շարժիչի հետադարձ կապի հոսանքի միջակայքը,Միավոր Ամպեր;
Առավելագույն հյուրընկալող:Հեռակառավարման հիմնական շարժիչի արագության ցուցադրման միջակայքը;
Առավելագույն քայլելը:Անվավեր պարամետր;
Արագության սահմանաչափի օֆսեթ:Ավտոմատ կտրելիս,Հեռակառավարման էկրանին քայլող շարժիչի արագության սահմանաչափը = այս պարամետրի 50%-ը;
Ավելացնել զգայունություն:Երբ հիմնական շարժիչի հետադարձ հոսքը մեծանում է,Ամեն անգամ, երբ արժեքը մեծանում է այս արժեքից ավելի,Ճանապարհորդական շարժիչի արագացում;
Նվազեցնել զգայունությունը:Երբ հիմնական շարժիչի հետադարձ կապի հոսանքը նվազում է,Ամեն անգամ, երբ արժեքը նվազում է այս արժեքից ավելի,Ճանապարհորդական շարժիչի դանդաղում;
Զգայունության փոխհատուցում:Պլյուս և մինուս զգայունության պարամետրերի օֆսեթ աճը;
Սահմանեք հոսանքը:Ավտոմատ կտրում,Հիմնական շարժիչի հետադարձ հոսանքի շեմը,գերազանցել այս արժեքը,Քայլող շարժիչը սկսում է դանդաղեցնել;այս արժեքից ցածր,Քայլող շարժիչը սկսում է արագանալ;Միավոր Ամպեր;
Սահմանեք հոսանքը:Ավտոմատ կտրում,Հիմնական շարժիչի հետադարձ հոսանքի շեմը,գերազանցել այս արժեքը,Քայլող շարժիչը սկսում է դանդաղեցնել;այս արժեքից ցածր,Քայլող շարժիչը սկսում է արագանալ;Միավոր Ամպեր;
Դատարկ ելք:Երբ սկսվում է ավտոմատ ռեժիմը,Եթե հիմնական շարժիչի հետադարձ կապի հոսանքը պակաս է այս արժեքից,գտնվում է պարապ ռեժիմում,այս արժեքից ավելի մեծ,ապա դուրս եկեք պարապ ռեժիմից,Մուտք գործեք կտրման ռեժիմ,Միավոր Ամպեր;
Առանց բեռի հոսանք:Երբ սկսվում է ավտոմատ ռեժիմը,Եթե հիմնական շարժիչի հետադարձ կապի հոսանքը պակաս է այս արժեքից,գտնվում է առանց բեռի ռեժիմում,այս արժեքից ավելի մեծ,ապա դուրս եկեք առանց բեռի ռեժիմից,Մուտք գործեք կտրման ռեժիմ,Միավոր Ամպեր;
Ձեռքի ճոճանակի արագություն:Swing arm շարժիչի գործարկման արագությունը;
կտրման ռեժիմ:Անցեք սղոցի և մետաղալարերի սղոցի ռեժիմների միջև,Անցնելուց հետո պարամետրերը նույնպես կփոխվեն համապատասխանաբար:;Սայրի սղոցի ռեժիմում,Հեռակառավարման էկրանին ավելացվել է ճոճվող թեւի շարժիչ,Լարային սղոցի ռեժիմը չունի ճոճվող թեւի շարժիչ:;
Debounce ժամանակ:Երբ հիմնական շարժիչի հետադարձ հոսքը գերազանցում է կանգառի հոսանքը,Անընդհատ կհայտնաբերի հետադարձ կապի հոսանքը,Debounce-ի ժամանակը այս շարունակական հայտնաբերման տեւողությունն է:,գերազանցել այս անգամ,Պարզեք, որ հիմնական շարժիչի հոսանքը դեռ գերազանցում է կանգառի հոսանքը,քայլելՇարժիչը կկանգնի;Հակառակ դեպքում, քայլող շարժիչը կշարունակի առաջ շարժվել;
դադարեցնել հոսանքը:Հիմնական շարժիչի հետադարձ կապի հոսանքը գերազանցում է այս արժեքը,Ճամփորդական շարժիչը կկանգնի;Միավոր Ամպեր;
օֆսեթ լռելյայն:Քայլող շարժիչի արագության սահմանաչափի սկզբնական արժեքը, երբ հեռակառավարման վահանակը միացված է = այս արժեքի 50%-ը;
![]()
| Ստացողի շահագործման էլեկտրամատակարարում |
DC24V / 1A (անկախ էլեկտրամատակարարում)
|
| Ստացողի ելքային կետի բեռ | AC0-250V/3A DC0-30V/5A |
| Ստացողի արագության կարգավորման ելքի լարման | DC0-10V |

Այս ապրանքը մեկնաբանելու վերջնական իրավունքը պատկանում է Chengdu Xinshen Technology Co., Ltd.。





