
ワイヤーソーマシン自動切断ワイヤレスリモコン
ワイヤーソーマシンDH12S-P6Sの自動切断ワイヤレスリモートコントロール
説明


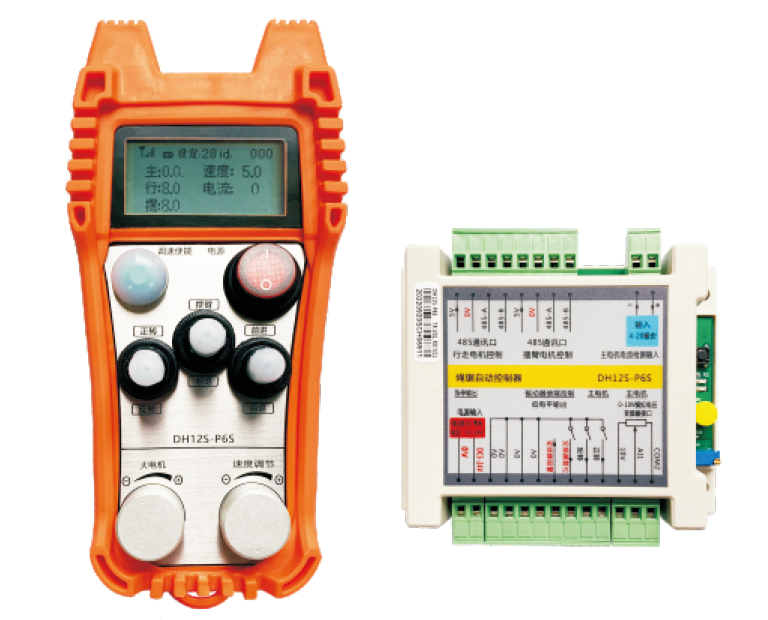
モデル:DH12S-P6Sアダプター装備:ワイヤーソー/ブレードソーマシン


述べる:3種類のアンテナを選択できます,デフォルトの吸引カップアンテナには標準が装備されています


メインモーター速度:ホスト:0-50
走行モーター速度:わかりました:0-50
自動切断走行モーターの最高速度制限:スピード:0-30(パラメーターは調整可能です)
自動切断メインモーター設定電流:設定:28(パラメーターは調整可能です)
スイングアームモーター速度:置く:0-50

低圧:リモートコントロールのバッテリーが低すぎます,バッテリーを交換してください

インターネットから落ちる:ワイヤレス信号の中断,レシーバー電源を確認してください,再び電源を入れます,リモートコントロールを再起動します

1、リモートコントロールがオンになりました
受信機は電源を入れています,受信機の D2 電源ライトが常に点灯します。,D1信号灯が点滅し始める;リモコンに2つのNo. 5バッテリーが設置されています,電源スイッチをオンにします,表示モーターの速度を表示します,これは、スタートアップが成功することを意味します。
2、メインモーターと速度調整
「速度制御有効」を長押し,「フォワード/リバース」スイッチをフォワードに回します,受信機のメインモーターが正転し、電源が入ります。;
「速度制御有効」を長押し,「フォワード/リバース」スイッチをフォワードに回します,受信機のメインモーターが正転し、電源が入ります。;
「速度制御有効」を長押し,「フォワード/リバース」スイッチを逆にします,受信機のメインモーターが逆転してオンになります;
スイッチを中央または逆に動かすだけです,メインモーターがすぐに停止する,有効にするために速度制御を押す必要はありません;
「ビッグモーター」ノブを回す,受信機のメインモーターのインバーター速度調整電圧は0〜10Vに調整できます。;
3、トラベルモーター
3、トラベルモーター
「速度制御有効」を長押し,「前進/後退」スイッチを前進または後進に動かします。,ウォーキングモーターは50の高速で動きます;
4、スイングアームモーターと速度調整
「スイングアーム/リバース」スイッチを回してスイングアームまたはリバースにします。,受信機のスイングアームモーターが始動します;次に「速度調整」ノブを回します,スイングアームモーターの速度を調整可能;
「速度制御有効」を長押し,次に、「スイングアーム/リバース」スイッチを切り替えます。,スイングアームモーターは50の高速で動きます。;
5、走行モーターの速度制限調整
「速度を有効にする」ボタンを長押しします,「速度調整」を回すと、自動切断時の走行モーターの最高速度制限を調整できます。;
6、自動切断
最初のステップ,メインモーターを始動します;ステップ2,走行モーターの最高速度制限を調整する;ステップ3,「前進/後進」スイッチを回すと前進または後進します。,自動カットモードに入る;
7、パラメータ設定(ユーザーが個人的に変更することは禁止されています)
パラメーターメニューを入力します:手動モードで,メインモーター回転数が0の場合,フォワード/リバーススイッチは連続して3回曲がっています,その後、3回続けて壊します,パラメーターメニューを入力します;
パラメータメニューを終了します:速度調整ノブ ページめくり,保存するか保存しないかを選択してください,有効化ボタンを押して確認します;
定格電流:メインモーター電流の最大値,単位アンペア;
速度規制パラメーター:自動切断制御パラメーター,デフォルト800,単位はミリ秒,変更は禁止されています;
減速パラメーター:切断電流の変化値がこの値を超える場合,急に減速を始める,単位アンペア;
加速A1:切断電流が設定された切断電流よりも低い場合,歩行モーターの加速ごとに増加する速度値;
減速A2: 切断電流が設定された切断電流よりも高い場合,歩行モーターの減速ごとに減少する速度値;
スイングアーム電流:デフォルト値,変更は禁止されています;
停止時間:自動モードでの過電流によるシャットダウン後,一定時間が経過してから再度電流を確認してください,設定電流以下の場合,歩行モーターを自動的に開始します;単位秒,デフォルト値,変更は禁止されています;
停止時間:自動モードでの過電流によるシャットダウン後,一定時間が経過してから再度電流を確認してください,設定電流以下の場合,歩行モーターを自動的に開始します;単位秒,デフォルト値,変更は禁止されています;
最大電流:メインモーターのフィードバック電流範囲,単位アンペア;
最大ホスト:リモコンメインモーター速度表示範囲;
最大のウォーキング:無効なパラメータ;
速度制限オフセット:自動的に切断するとき,リモコン表示のウォーキングモーター速度制限 = このパラメータの 50%;
感度を追加する:メインモーターのフィードバック電流が増加した場合,値がこの値を超えて増加するたびに,走行モーターの加速度;
感度を下げる:メインモーターのフィードバック電流が減少した場合,値がこの値を超えて減少するたびに,走行モーターの減速度;
感度オフセット:プラスおよびマイナス感度パラメータのオフセット増分;
設定電流:自動切断,メインモーターフィードバック電流の閾値,この値を超える,歩行モーターが減速し始める;この値を下回ると,歩行モーターが加速し始めます;単位アンペア;
設定電流:自動切断,メインモーターフィードバック電流の閾値,この値を超える,歩行モーターが減速し始める;この値を下回ると,歩行モーターが加速し始めます;単位アンペア;
空の出口:自動モードが始まると,メインモーターのフィードバック電流がこの値より小さい場合,アイドリングモードです,この値より大きい,その後アイドリングモードを終了します,切断モードに入る,単位アンペア;
無負荷電流:自動モードが始まると,メインモーターのフィードバック電流がこの値より小さい場合,無負荷モードです,この値より大きい,無負荷モードを終了します,切断モードに入る,単位アンペア;
スイングアームの速度:スイングアームモーターの起動速度;
切断モード:ブレードソーモードとワイヤーソーモードを切り替えます,切り替え後はパラメータもそれに応じて切り替わります。;ブレードソーモード時,リモコン表示部にスイングアームモーターを追加,ワイヤーソーモードにはスイングアームモーターはありません。;
デバウンス時間:メインモータフィードバック電流が停止電流を超えた場合,フィードバック電流を継続的に検出します,デバウンス時間は、この継続的な検出の継続時間です。,この時間を超える,メインモーター電流が依然として停止電流を超えていることを検出,歩くモーターが停止します;そうしないと、歩行モーターは前進し続けます。;
停止電流:メインモーターのフィードバック電流がこの値を超えています,走行モーターが停止します;単位アンペア;
オフセットのデフォルト:リモコンがオンになったときの歩行モーター速度制限の初期値 = この値の 50%;
![]()
| 受信機の動作電源 |
DC24V/1A(独立電源)
|
| レシーバー出力ポイント負荷 | AC0-250V/3A DC0-30V/5A |
| 受信速度レギュレーション出力電圧 | DC0-10V |

この製品を解釈する最終的な権利は、Chengdu Xinshen Technology Co.、Ltdに属します。。




-500x650.png)
