
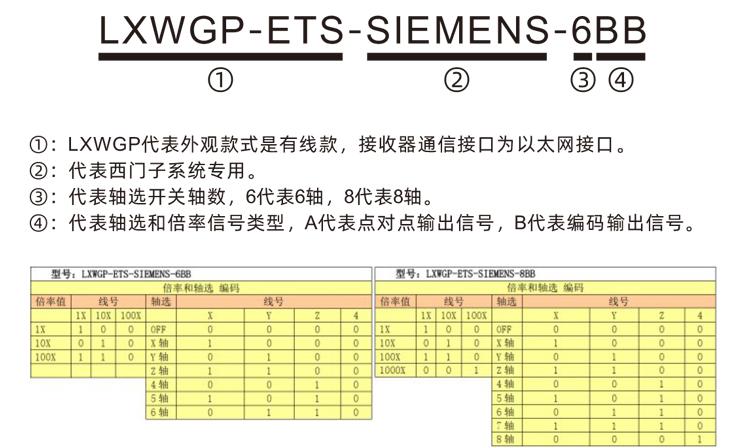
LXWGP-ETS-SIEMENS 有線電子ハンドホイール
説明


電子ハンドホイールは CNC 工作機械の手動ガイドに使用されます、位置、ストライキ操作。このモデルの電子ハンドホイールは、実際のディスプレイを備えたシーメンスの有線電子ハンドホイールです。,ハンドホイールは、ネットワーク ケーブルを介して Siemens システムの X130 インターフェイスに接続されています。,システム座標を読み取り、S7 プロトコル通信を通じてハンドルの LCD ディスプレイに表示します。,また、ハンドル制御系の軸選択は通信により行うことができます。、倍率、ボタンとその他の信号。

1.6芯航空プラグケーブルを使用して接続,ハンドホイールケーブル長さ 10 メートル。
2.ハンドホイール画面にシステムのワーク座標を表示可能、機械座標、送り速度、軸の選択、倍率などの情報。
3.緊急停止ボタンをサポートします,数量IO信号出力の切り替え,ハンドル停止緊急停止は引き続き有効です。
4.6つのカスタムボタンをサポート,IO信号の切り替え,IO配線や通信を通じてシステムに信号を出力可能。
5.6軸または8軸制御をサポート,IO信号の切り替え,IO配線や通信を通じてシステムに信号を出力可能。
6.3 または 4 レベルの倍率制御をサポート,IO信号の切り替え,IO配線や通信を通じてシステムに信号を出力可能。
7.パルスエンコーダーをサポートします,100パルス/円,ABパルス配線によりシステムに信号を出力できます。。
8.Siemens S7プロトコルをサポートします,シーメンス 828D をサポート、840DSL、ONE およびその他のモデル システム。

| ハンドル作動電源電圧 | DC24V/1A |
| 受信電源電圧 | DC24V/1A |
| レシーバIO出力負荷範囲 |
DC24V
|
| ハンドル端ケーブル長さ |
10メートル
|
| 受信側ケーブル長 |
1メートル
|
| 受信側ネットワークケーブルの長さ |
3メートル
|
| 動作温度 |
-25℃<x<55℃
|
| アンチフォールの高さ |
1メートル
|
| ボタンの数をカスタマイズします | 6個々 |
| 製品サイズ | 233*90.7*77.4(mm) |


コメント:
①非常停止ボタン:
緊急停止ボタンを押します,レシーバー上の緊急停止IO出力の2つのグループが切断されています,そして、ハンドホイールのすべての機能は無効です。
緊急停止が解放された後,緊急停止IO出力は、受信機の閉じています,ハンドホイールのすべての機能が復元されます。
②画面表示:
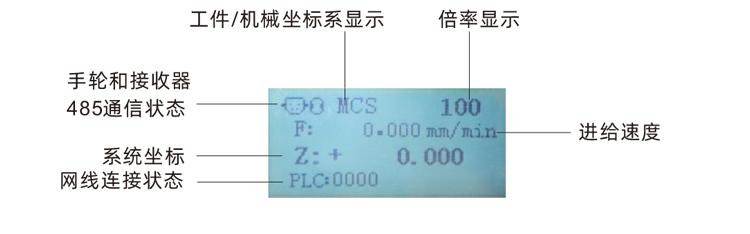
PLC:0000ネットワークケーブルが接続されていないことを意味します,PLC:1010これは、ネットワーク ケーブルと PLC システムが正常に接続されていることを意味します。,
PLC:1110ハンドホイールがシステム データを正常に書き込んだことを示します。,PLC:0001コンピュータへの接続が成功したことを示します。
③カスタムボタン:
6カスタムボタン,各ボタンは、受信機のIO出力ポイントに対応します,通信でもシステムと接続。
④軸選択スイッチ:
軸選択スイッチを切り替えると、手輪で制御された移動軸を切り替えることができます。
⑤有効ボタン:
どちらかの側のいずれかの有効化ボタンを押し続けます,パルスエンコーダを振るだけで効果あり。 そして、受信機上の 2 セットの有効な IO 出力がオンになります。,[イネーブル]ボタンをリリースします,IO出力切断を有効にします。
⑥倍率スイッチ:
倍率スイッチを切り替えるとハンドルで制御する倍率を切り替えることができます。。
⑦パルスエンコーダ:
[イネーブル]ボタンを押し続けます,パルスエンコーダーの振る,パルス信号を送信します,マシンシャフトの動きを制御します。
⑧ハンドルケーブル:
ハンドルと受信機を接続するケーブル,航空プラグ,ハンドル電源および通信用。



6.1製品のインストール手順
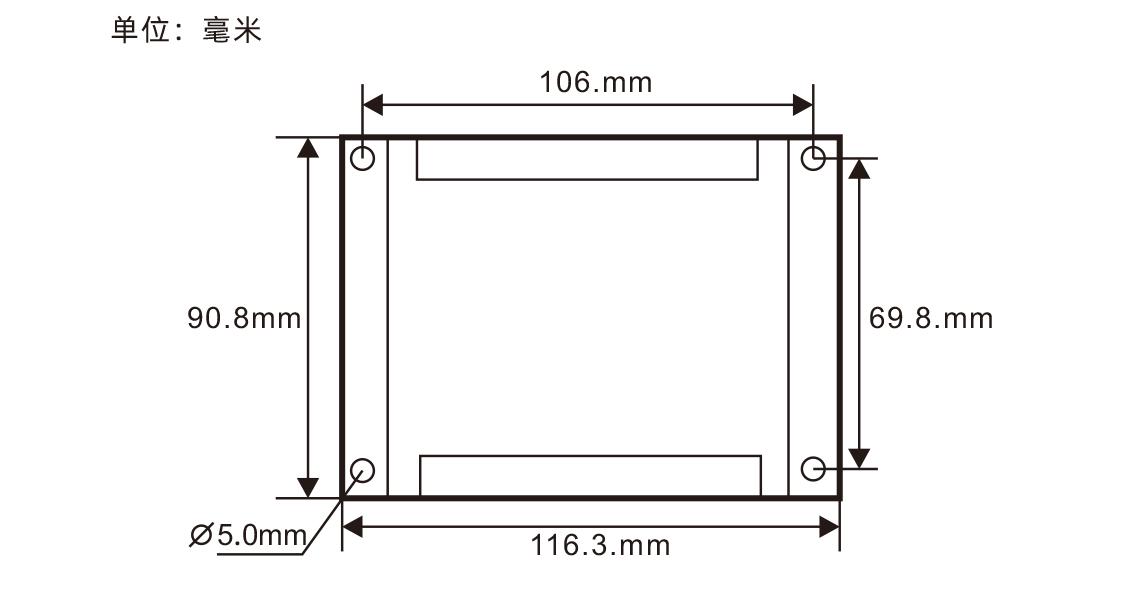
1.受信機を電気キャビネットの四隅のネジ穴に通して取り付けます。。
2.レシーバー配線図を参照してください,オンサイトの機器を比較してください,ケーブルとレシーバーを介してデバイスを接続します
接続する,ネットワーク ケーブルを使用して、受信機をシステムの X130 インターフェイスに接続します。。
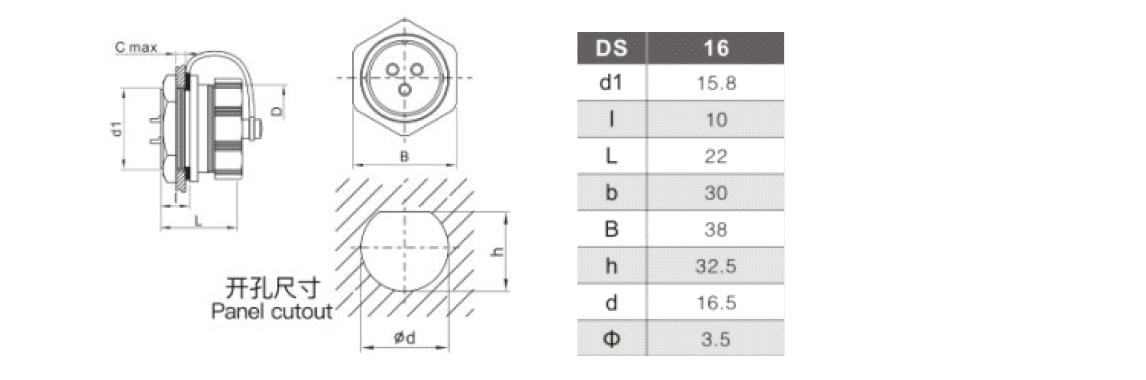
3.受信機が固定された後,航空プラグベースをパネルのハンドル開口部に取り付けます。,もう一つの拠点
端子台は受信機のハンドホイール インターフェイスに差し込まれます。。次に、ハンドルエンドケーブルの航空プラグをベースに挿入します。,締める
備品。
6.2受信機のインストールサイズ
6.3航空プラグ取り付け寸法
6.4レシーバー配線参照図

6.2受信機のインストールサイズ
6.3航空プラグ取り付け寸法
6.4レシーバー配線参照図

1.受信機は電源を入れています,受信機の動作光が点灯しています,ネットワークケーブルを使用して受信機をコンピュータに接続します,パソコンに固定IPアドレスを設定する,ネットワーク設定ツール ソフトウェアを使用して、ハンドホイール機能のネットワーク パラメータを設定します,特定の設定
方法は「LXWGP-ETS 有線ハンドル車使用説明書」を参照してください。。
2.受信機のセットアップが完了したら,システムにはPLCプログラムのプログラミングが必要です,詳細については、「各種シーメンス CNC システムの LXWGP-ETS 設定方法」および PLC プログラム ルーチン情報を参照してください。。
3.上記の設定が完了したら,受信機を機械の電気キャビネットに持ってきて設置します,ネットワーク ケーブルをコンピュータから取り外し、システムの X130 インターフェイスに接続します。,受信機の電源とパルスワイヤーを差し込みます。
4.マシンは搭載されています,受信機は電源を入れています,受信機の動作光が点灯しています,ハンドルの電源スイッチをオンにします,ハンドホイールスクリーンブート,画面表示PLC:1010,ハンドホイールとシステム間の通信が成功したことを示します。。
5.軸選択を選択:車軸選択スイッチを切り替えます,操作する軸を選択します。
6.乗数を選択します:拡大スイッチを切り替えます,必要な乗数を選択します。
7.軸を移動します:[イネーブル]ボタンを押し続けます,軸とスイッチを選択します,乗数スイッチを選択します,次に、パルスエンコーダーを回します,時計回りに前方に移動する軸を回します,負の動き軸を反時計回りに回します。
8.カスタムボタンを押し続けます,対応するボタンIOレシーバーの出力がオンになっています,ボタン出力を閉じます。
9.緊急停止ボタンを押します,受信機は、緊急停止IO出力を切断します,ハンドホイール機能は失敗します,緊急停止ボタンをリリースします,緊急停止IO出力が閉じられました,ハンドホイール関数の回復。


| 障害の状況 | 考えられる原因 |
トラブルシューティング方法
|
|
|
トラブルシューティング方法
|
1.ハンドホイールと受信機間の航空ケーブルが正しく確実に接続されているかどうか
2.受信機の電源電圧は十分ですか?
3.ハンドホイールの故障
|
1.ハンドホイールと受信機の間の航空ケーブルの接続を確認してください。
2.受信機の入力電力を確認してください
3.メーカーに連絡して、メンテナンスのために工場に戻ってください
|
|
| ハンドルを操作しても反応しない |
1.受信機とシステム間のネットワークケーブルは接続されていますか?
2.システム PLC プログラムは適切に作成されていますか?
3.受信機の設定は正しく設定されていますか?
4.ハンドル表示部に表示される485通信アイコンが故障していませんか?
5.ハンドホイールを操作するとき,両側の有効化ボタンを押し続ける必要があります
6.非常停止ボタンは解除されていますか?
|
1.受信機とシステム X130 ネットワーク ポートがネットワーク ケーブルで接続されているかどうかを確認します。
2.システム PLC が当社が提供した参考資料に従って記述されているかどうかを確認してください。
3.受信者が当社情報および提供ツールソフトを参照しているか確認する,受信機のネットワークパラメータやDBアドレスなどを正しく設定してください。
4.ハンドルと受信機の間を確認してください
6コアグリーンソケット,通信回線のうちの 2 回線:485-A および 485-B,正しく確実に接続されていますか?,回路の断線はありますか?
|
|
|
受信機の電源を入れた後,受信機の作業灯が点灯しない
|
1.電源異常
2.電源配線エラー
3.受信障害
|
1.電源に電圧があるかどうかを確認してください,
電圧は要件を満たしていますか
2.電源の正と負の極が逆に接続されているかどうかを確認します
3.工場のメンテナンスに戻ります
|

1.室温と圧力でお願いします,乾燥した環境で使用されます,サービスの寿命を延ばします。
2.雨の中で濡れないでください、水疱などの異常な環境で使用されます,サービスの寿命を延ばします。
3.ハンドホイールをきれいにしてください,サービスの寿命を延ばします。
4.圧迫は避けてください、秋、バンピングなど。,ダメージや精度エラーからハンドホイール内の精密アクセサリを防ぐ。
5.長い間使用されていません,ハンドホイールを清潔で安全な場所に保管してください。
6.貯蔵および輸送中の湿気と衝撃防止に注意してください。

1.使用する前に使用するための手順を読んでください,非専門家の職員は禁止されています。
2.ハンドルに何らかの異常が発生した後,すぐに使用を中止してください,そしてトラブルシューティングを行う,トラブルシューティングの前に,故障したハンドルを再度使用することは禁止されています,ハンドルの未知の故障による安全上の事故を回避します。;
3.修理が必要な場合,メーカーに連絡してください,自己修復によって引き起こされる損傷の場合,メーカーは保証を提供しません。


.png)

.png)
