
უკაბელო დისტანციური მართვის ავტომატური ჭრა მავთულის ხერხი
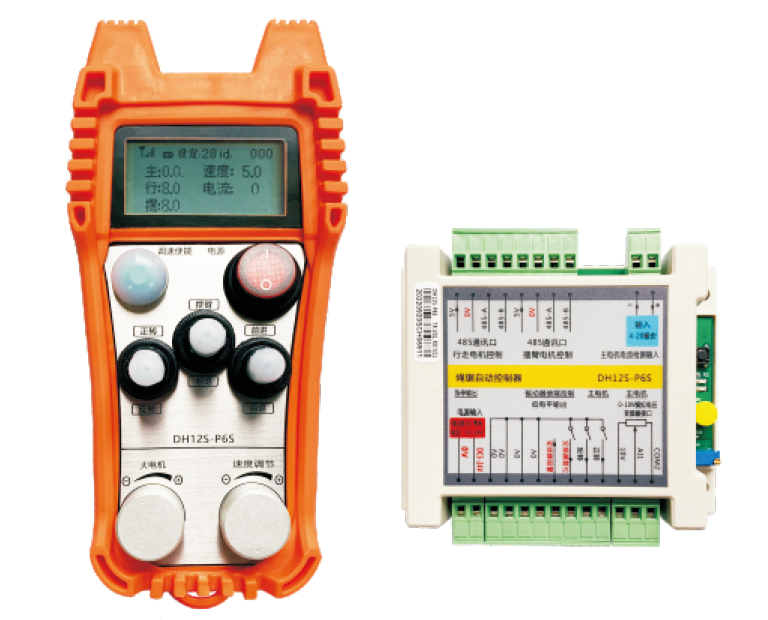
ავტომატური ჭრის უკაბელო დისტანციური მართვის მავთულის ხერხის მანქანა DH12S-P6S
აღწერილობა


ნიმუში:DH12S-P6S ადაპტერის მოწყობილობა:მავთულის ხერხი/დანა ხერხის მანქანა


შენიშვნა:ანტენის სამი ტიპი შეიძლება შეირჩეს,ნაგულისხმევი შეწოვის თასის ანტენა აღჭურვილია სტანდარტით


მთავარი ძრავის სიჩქარე:მასპინძელი:0-50
ფეხით ძრავის სიჩქარე:კარგი:0-50
ავტომატური ჭრის ფეხით ძრავის მაქსიმალური სიჩქარის ლიმიტი:სისწრაფე:0-30(პარამეტრები რეგულირდება)
ავტომატური ჭრის მთავარი საავტომობილო ნაკრები დენი:დაყენება:28(პარამეტრები რეგულირდება)
სვინგის მკლავის ძრავის სიჩქარე:დადება:0-50

დაბალი წნევა:დისტანციური მართვის ბატარეა ძალიან დაბალია,გთხოვთ შეცვალოთ ბატარეა

იშლება ინტერნეტიდან:უკაბელო სიგნალის შეფერხება,გთხოვთ, შეამოწმოთ მიმღების ელექტრომომარაგება,ენერგია ისევ,გადატვირთეთ დისტანციური კონტროლი

1、დისტანციური მართვა ჩართულია
მიმღები იკვებება,მიმღებზე D2 ელექტრომომარაგების შუქი ყოველთვის ჩართულია,D1 სიგნალის შუქი იწყებს flash;დისტანციური კონტროლზე დამონტაჟებულია ორი 55 ბატარეა,ჩართეთ დენის შეცვლა,ეკრანის ჩვენების ძრავის სიჩქარე,ეს ნიშნავს, რომ გაშვება წარმატებულია。
2、ძირითადი ძრავა და სიჩქარის რეგულირება
ხანგრძლივად დააჭირეთ "სიჩქარის კონტროლის ჩართვა",ჩართეთ "წინ/საპირისპირო" შეცვლა წინ,მიმღების მთავარი ძრავა ბრუნავს წინ და ირთვება;
ხანგრძლივად დააჭირეთ "სიჩქარის კონტროლის ჩართვა",ჩართეთ "წინ/საპირისპირო" შეცვლა წინ,მიმღების მთავარი ძრავა ბრუნავს წინ და ირთვება;
ხანგრძლივად დააჭირეთ "სიჩქარის კონტროლის ჩართვა",გადააქციეთ "წინ/საპირისპირო" შეცვლა საპირისპიროდ,მიმღების მთავარი ძრავა უკუბრუნდება და ირთვება;
უბრალოდ გადაიტანეთ გადამრთველი შუაზე ან უკან,მთავარი ძრავა მაშინვე ჩერდება,არ არის საჭირო სიჩქარის დაჭერით;
გადაატრიალეთ "დიდი ძრავის" ღილაკი,მიმღების მთავარი საავტომობილო ინვერტორული სიჩქარის რეგულირების ძაბვა შეიძლება მორგებული იყოს 0-10V;
3、ფეხით მოსიარულე ძრავა
3、ფეხით მოსიარულე ძრავა
ხანგრძლივად დააჭირეთ "სიჩქარის კონტროლის ჩართვა",ჩართეთ "წინ/საპირისპირო" შეცვლა წინ ან უკან,ფეხით მოსიარულე ძრავა გადავა 50 სიჩქარით;
4、სვინგის მკლავი და სიჩქარის რეგულირება
ჩართეთ "სვინგის მკლავი/დაბრუნების" შეცვლა სვინგის მკლავზე ან უკან,მიმღების სვინგის მკლავი იწყება;შემდეგ ჩართეთ "სიჩქარის კორექტირება" ღილაკი,შეუძლია შეცვალოს სვინგის მკლავის ძრავის სიჩქარე;
ხანგრძლივად დააჭირეთ "სიჩქარის კონტროლის ჩართვა",ისევ ჩართეთ "სვინგის მკლავი/უკან დახევის" შეცვლა,სვინგის მკლავის ძრავა გადაადგილდება მაღალი სიჩქარით 50;
5、სიჩქარის ლიმიტის რეგულირება ფეხით ძრავის
დააჭირეთ ღილაკს "სიჩქარის კორექტირების ჩართვა",მბრუნავ "სიჩქარის კორექტირებას" შეუძლია შეცვალოს სიარული ძრავის მაქსიმალური სიჩქარის ზღვარი ავტომატური ჭრის დროს;
6、ავტომატური ჭრა
პირველი ნაბიჯი,დაიწყეთ მთავარი ძრავა;ნაბიჯი 2,შეცვალეთ ფეხით ძრავის მაქსიმალური სიჩქარის ზღვარი;ნაბიჯი 3,ჩართეთ "წინ/საპირისპირო" შეცვლა წინ ან უკან,შეიყვანეთ ავტომატური ჭრის რეჟიმი;
7、პარამეტრის პარამეტრები (მომხმარებლები კრძალავენ კერძო მოდიფიკაციას)
შეიყვანეთ პარამეტრის მენიუ:სახელმძღვანელო რეჟიმში,როდესაც მთავარი ძრავის სიჩქარეა 0,წინ/საპირისპირო შეცვლა ზედიზედ 3 ჯერ იზრდება,შემდეგ დაარღვიე ზედიზედ 3 ჯერ,შეიყვანეთ პარამეტრის მენიუ;
პარამეტრების მენიუდან გასვლა:სიჩქარის რეგულირების ღილაკის გვერდი ჩართეთ,აირჩიეთ შენახვა ან არ შენახვა,დააჭირეთ ღილაკს ჩართვის დასადასტურებლად;
შეფასებული მიმდინარე:ძირითადი საავტომობილო დენის მაქსიმალური მნიშვნელობა,განყოფილების ამპერი;
სიჩქარის რეგულირების პარამეტრები:ავტომატური ჭრის კონტროლის პარამეტრები,ნაგულისხმევი 800,ერთეულის მილიწამი,აკრძალულია მოდიფიკაცია;
შენელებული პარამეტრები:როდესაც მიმდინარე ცვლილების მნიშვნელობა აჭარბებს ამ მნიშვნელობას,დაიწყეთ სწრაფად შენელება,განყოფილების ამპერი;
აჩქარება A1:როდესაც ჭრის დენი უფრო დაბალია, ვიდრე ნაკრები ჭრის დენზე,სიარული ძრავის სიჩქარის მნიშვნელობა იზრდება თითოეული აჩქარებისთვის;
შენელება A2: როდესაც ჭრის დენი უფრო მაღალია, ვიდრე მითითებული ჭრის დენი,სიჩქარის მნიშვნელობა მცირდება ფეხით მოძრავი ძრავის ყოველი შენელებით;
სვინგის მკლავის დენი:ნაგულისხმევი მნიშვნელობა,აკრძალულია მოდიფიკაცია;
გაჩერების დრო:ავტომატურ რეჟიმში მიმდინარე გადატვირთვის გამო გამორთვის შემდეგ,გარკვეული პერიოდის შემდეგ კვლავ შეამოწმეთ დენი,თუ დადგენილ დენზე ნაკლებია,ავტომატური ჩართვა ფეხით ძრავა;ერთეული მეორე,ნაგულისხმევი მნიშვნელობა,აკრძალულია მოდიფიკაცია;
გაჩერების დრო:ავტომატურ რეჟიმში მიმდინარე გადატვირთვის გამო გამორთვის შემდეგ,გარკვეული პერიოდის შემდეგ კვლავ შეამოწმეთ დენი,თუ დადგენილ დენზე ნაკლებია,ავტომატური ჩართვა ფეხით ძრავა;ერთეული მეორე,ნაგულისხმევი მნიშვნელობა,აკრძალულია მოდიფიკაცია;
მაქსიმალური დენი:ძირითადი ძრავის უკუკავშირის დენის დიაპაზონი,განყოფილების ამპერი;
მაქსიმალური მასპინძელი:დისტანციური მართვის მთავარი ძრავის სიჩქარის ჩვენების დიაპაზონი;
მაქსიმალური სიარული:არასწორი პარამეტრი;
სიჩქარის ლიმიტის ოფსეტური:ავტომატურად ჭრისას,სამგზავრო ძრავის სიჩქარის ლიმიტი დისტანციური მართვის ეკრანზე = ამ პარამეტრის 50%;
დაამატეთ მგრძნობელობა:როდესაც ძირითადი ძრავის უკუკავშირის დენი იზრდება,ღირებულება იზრდება ყოველ ჯერზე აღემატება ამ მნიშვნელობას,ფეხით ძრავის აჩქარება;
მგრძნობელობის შემცირება:ძირითადი საავტომობილო უკუკავშირის დენი მცირდება,ყოველ ჯერზე შემცირებული ღირებულება აღემატება ამ მნიშვნელობას,სიარული ძრავა შენელდება;
მგრძნობელობის ოფსეტური:მგრძნობელობის პარამეტრების დამატების და გამოკლების ოფსეტური ზრდა;
დააყენეთ მიმდინარე:ავტომატური ჭრა,ძირითადი ძრავის უკუკავშირის დენის ბარიერი,ამ ღირებულებაზე მეტი,ფეხით მოსიარულე ძრავა იწყებს შენელებას;ამ მნიშვნელობის ქვემოთ,ფეხით მოსიარულე ძრავა იწყებს აჩქარებას;განყოფილების ამპერი;
დააყენეთ მიმდინარე:ავტომატური ჭრა,ძირითადი ძრავის უკუკავშირის დენის ბარიერი,ამ ღირებულებაზე მეტი,ფეხით მოსიარულე ძრავა იწყებს შენელებას;ამ მნიშვნელობის ქვემოთ,ფეხით მოსიარულე ძრავა იწყებს აჩქარებას;განყოფილების ამპერი;
ცარიელი გასასვლელი:როდესაც ავტომატური რეჟიმი იწყება,თუ ძირითადი ძრავის უკუკავშირის დენი ამ მნიშვნელობას ნაკლებია,ცარიელ რეჟიმში,ამ ღირებულებაზე მეტი,ცარიელი რეჟიმში გასვლა,შეიყვანეთ ჭრის რეჟიმი,განყოფილების ამპერი;
არ არის დატვირთვის დენი:როდესაც ავტომატური რეჟიმი იწყება,თუ ძირითადი ძრავის უკუკავშირის დენი ამ მნიშვნელობას ნაკლებია,დატვირთვის რეჟიმში,ამ ღირებულებაზე მეტი,დატოვეთ დატვირთვის რეჟიმი,შეიყვანეთ ჭრის რეჟიმი,განყოფილების ამპერი;
სვინგის სიჩქარე:სვინგის მკლავის ძრავის საწყისი სიჩქარე იწყება;
ჭრის რეჟიმი:გადართეთ Blade Saw- სა და Wire Saw- ს შორის,პარამეტრების შეცვლის შემდეგ, პარამეტრების შესაბამისად ასევე შეიცვლება.;Blade Saw რეჟიმში,დისტანციური მართვის ეკრანი დასძენს სვინგის მკლავის ძრავას,მავთულის ხერხის რეჟიმში არ არის სვინგის ძრავა;
დებიუტის დრო:როდესაც ძირითადი ძრავის უკუკავშირის დენი აღემატება გაჩერების დინებას,უკუკავშირის მიმდინარეობა მუდმივად გამოვლინდება,დებიუტის დრო არის ამ უწყვეტი გამოვლენის ხანგრძლივობა,ამ დროზე მეტი,მთავარი საავტომობილო დენის გამოვლენა კვლავ აღემატება გაჩერების დინებას,სიარულიძრავა შეჩერდება;წინააღმდეგ შემთხვევაში, ფეხით მოსიარულე ძრავა გააგრძელებს წინსვლას;
შეაჩერე მიმდინარე:ძირითადი ძრავის უკუკავშირის დენი აღემატება ამ მნიშვნელობას,ფეხით მოსიარულე ძრავა შეჩერდება;განყოფილების ამპერი;
ოფსეტური ნაგულისხმევი:სამგზავრო ძრავის სიჩქარის ზღვრის საწყისი მნიშვნელობა, როდესაც დისტანციური მართვის ჩართულია = ამ მნიშვნელობის 50%;
![]()
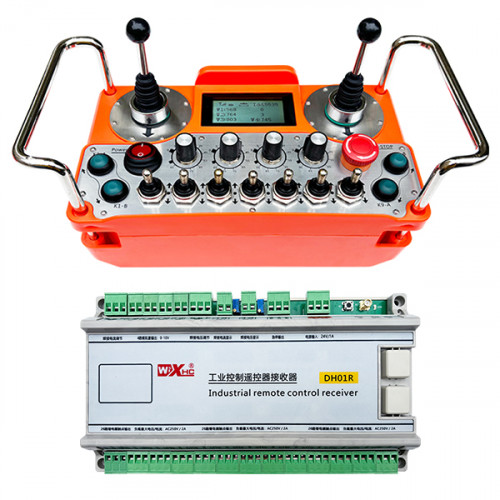
| მიმღები საოპერაციო ელექტრომომარაგება |
DC24V/1A (დამოუკიდებელი ელექტრომომარაგება)
|
| მიმღების გამომავალი წერტილის დატვირთვა | AC0-250V/3A DC0-30V/5A |
| მიმღების სიჩქარის რეგულირების გამომავალი ძაბვა | DC0-10V |

ამ პროდუქტის ინტერპრეტაციის საბოლოო უფლება ეკუთვნის Chengdu Xinshen Technology Co., Ltd.。

-500x650.png)


