

ການຄວບຄຸມໄລຍະໄກຊັ້ນ
ການຄວບຄຸມສາຍໄຮ້ສາຍຊັ້ນຊັ້ນ DH22St-LE
ລາຍລະອຽດ
![]()

ແບບ:dh22st-le
ອຸປະກອນປັບຕົວ:ເຄື່ອງບົດຊັ້ນ

ຂໍ້ສັງເກດ:ສາມປະເພດຂອງເສົາອາກາດສາມາດເລືອກໄດ້,ເສົາອາກາດເຕະບານໃນຕອນຕົ້ນແມ່ນມີມາດຕະຖານ

ຢຸດສຸກເສີນ:ປຸ່ມ Stop ສຸກເສີນໄດ້ຖືກປະຕິບັດ,ກະລຸນາປ່ອຍປຸ່ມ Stop ສຸກເສີນ
ຄວາມກົດດັນຕ່ໍາ:ແບັດເຕີຣີຂອງການຄວບຄຸມໄລຍະໄກແມ່ນຕໍ່າເກີນໄປ,ກະລຸນາທົດແທນແບັດເຕີຣີ

ຕົກອອກຈາກອິນເຕີເນັດ:ການຂັດຂວາງສັນຍານໄຮ້ສາຍ,ກະລຸນາກວດເບິ່ງການສະຫນອງພະລັງງານຂອງຜູ້ຮັບ,ພະລັງງານອີກເທື່ອຫນຶ່ງ,ເລີ່ມຕົ້ນການຄວບຄຸມໄລຍະໄກ
![]()
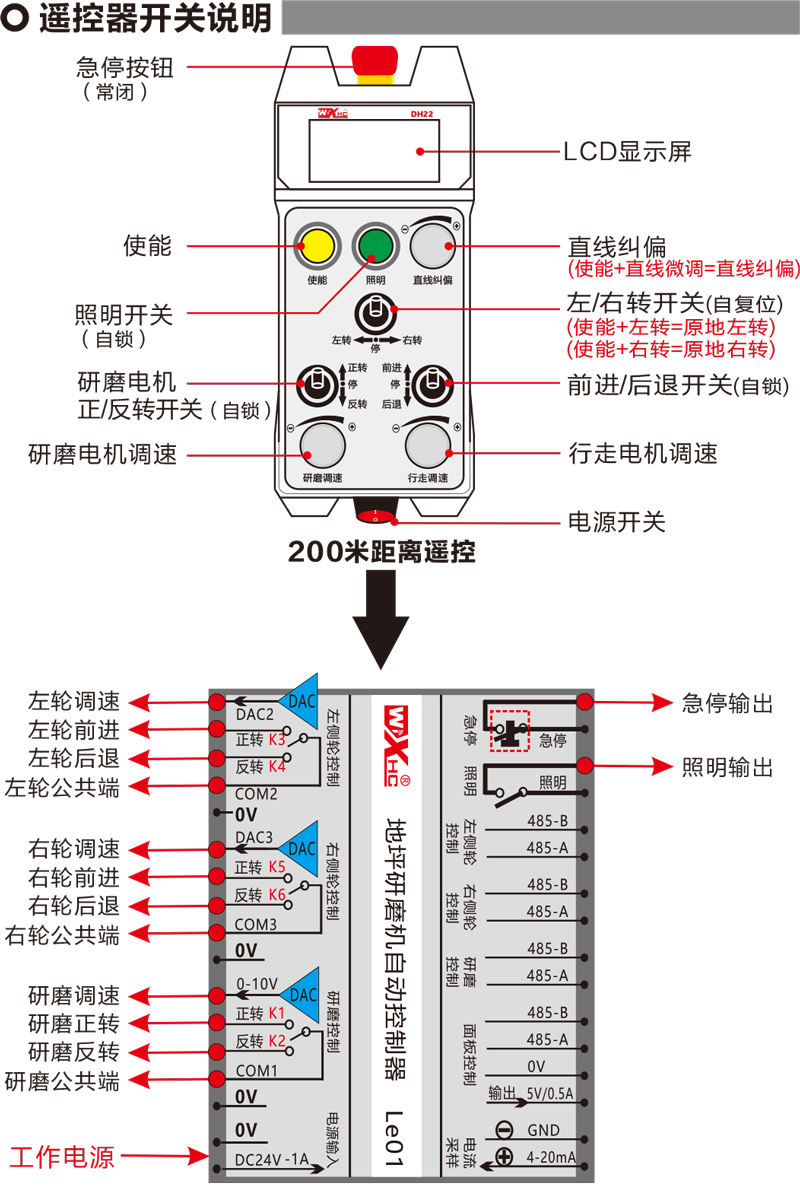
1、ການຄວບຄຸມໄລຍະໄກເປີດ
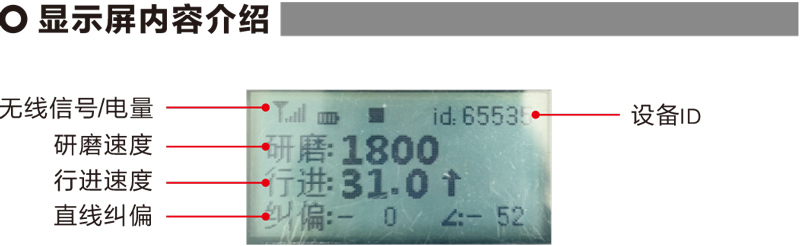
ຜູ້ຮັບແມ່ນໃຊ້ໄດ້,ແສງສະຫວ່າງທີ່ນໍາພາໃຫ້ກັບຜູ້ຮັບເລີ່ມຕົ້ນ;ຫມໍ້ໄຟ 5 ອັນດັບ 5 ຕິດຕັ້ງຢູ່ໃນການຄວບຄຸມໄລຍະໄກ,ເປີດໃຊ້ໄຟຟ້າ,ສະແດງຄວາມໄວໃນການສະແດງ,ມັນຫມາຍຄວາມວ່າການເລີ່ມຕົ້ນແມ່ນປະສົບຜົນສໍາເລັດ。
2、ແສງສະຫວ່າງ
ກົດປຸ່ມ "ເຮັດໃຫ້ມີແສງ",ຜົນຜະລິດເຮັດໃຫ້ມີແສງສະຫວ່າງຮັບແມ່ນຖືກເປີດ,ຮູບສັນຍາລັກເຮັດໃຫ້ມີແສງປະກົດຢູ່ໃນຈໍສະແດງຜົນ
ກົດປຸ່ມເຮັດໃຫ້ມີແສງອີກຄັ້ງ,ຜົນຜະລິດເຮັດໃຫ້ມີແສງສະຫວ່າງຮັບແມ່ນແລ້ວ,ສະແດງຮູບສັນຍາລັກຂອງຮູບພາບຫາຍໄປ。
3、ການຜະລິດລົດຈັກແລະຄວາມໄວ
ປ່ຽນ "ຕໍ່ຫນ້າ / ປີ້ນກັບກັນ" ເພື່ອສົ່ງຕໍ່,ເຄື່ອງຮັບມາດຕະຖານສົ່ງຕໍ່ໄປ,ຈໍສະແດງຜົນສະແດງການຫມູນວຽນ
ປ່ຽນ "Forward / Reverse" ປ່ຽນໄປປີ້ນກັບກັນ,ການເປີດປີ້ນກັບກັນ,ສະແດງການສະແດງຜົນ
ປ່ຽນ "Forward / Reverse" ປ່ຽນໄປປີ້ນກັບກັນ,ການເປີດປີ້ນກັບກັນ,ສະແດງການສະແດງຜົນ
ຫມຸນ "ການປັບຄວາມໄວຂອງການປັບຄວາມໄວ" Knob,ແຮງດັນຜົນຜະລິດຂອງລະບຽບການເລັ່ງຄວາມໄວຂອງຜູ້ຮັບສາມາດປັບໄດ້ໂດຍ 0-10V;
4、ເວລາຍ່າງລົດຈັກແລະຄວາມໄວ
ປ່ຽນ "ຕໍ່ຫນ້າ / ປີ້ນກັບກັນ" ເພື່ອສົ່ງຕໍ່,ຜູ້ຮັບ Revolver ຄວາມຄືບຫນ້າແລະຄວາມຄືບຫນ້າທີ່ຖືກຕ້ອງເປີດ,ສະແດງ Forward
ປ່ຽນ "ຕໍ່ຫນ້າ / ດ້ານຫຼັງ" ສະຫຼັບກັບດ້ານຫລັງ,ການເປີດຄືນການສະຫນັບສະຫນູນຂອງຜູ້ຮັບແລະ REVERAIVE OPTAL,ສະແດງ 
ຫມຸນ "ກົດລະບຽບຄວາມໄວໃນການຍ່າງ" Knob ",ແຮງດັນຜົນຜະລິດຂອງຫມູນວຽນຂອງ retrolver ຮັບແລະລໍ້ຂວາສາມາດປັບໄດ້ເພື່ອປັບປັບກະແສໄຟຟ້າຂອງ 0-10V;
5、ລ້ຽວຊ້າຍແລະຂວາ
ປ່ຽນ "ຊ້າຍ / ຂວາ" ສະຫຼັບໄປທາງຊ້າຍ,ເຄື່ອງຮັບລໍ້ຂວາກ້າວຫນ້າເພື່ອເປີດ,ຈໍສະແດງຜົນການສະແດງລ້ຽວຊ້າຍ 
ປ່ຽນ "ຊ້າຍ / ຂວາ" ສະຫຼັບໄປທາງຂວາ,ຜູ້ຮັບ REVOLVER REVENTS ເປີດ,ຈໍສະແດງຜົນການສະແດງລ້ຽວຂວາ
6、ລ້ຽວເຂົ້າ
ລ້ຽວຊ້າຍໃນສະຖານທີ່:ກົດປຸ່ມແລະກົດປຸ່ມ Enable,ປ່ຽນ "ຊ້າຍ / ຂວາ" ປ່ຽນໄປທີ່ຕໍາແຫນ່ງຊ້າຍ,ເຄື່ອງຮັບສົ່ງແລະລໍ້ຂວາຂອງຜູ້ຮັບແລະຂວາເປີດ,ເລີ່ມຕົ້ນລ້ຽວຊ້າຍ;
ລ້ຽວຂວາໃນສະຖານທີ່:ກົດປຸ່ມແລະກົດປຸ່ມ Enable,ປ່ຽນ "ຊ້າຍ / ຂວາ" ສະຫຼັບໄປທີ່ຕໍາແຫນ່ງລ້ຽວຂວາ,ຜູ້ຮັບ retrolver tomch ໄປທາງຫນ້າແລະຂວາເປີດ,ເລີ່ມຕົ້ນລ້ຽວຂວາໃນສະຖານທີ່;
7、ຢຸດສຸກເສີນ
ໃຊ້ປຸ່ມຢຸດສຸກເສີນ,ການຢຸດເຊົາສຸກເສີນຢຸດ;ການຄວບຄຸມສະຫຼັບສັບຊ້ອນທັງຫມົດແມ່ນຖືກຕັດຂາດ,ຄວາມໄວທັງຫມົດຈະແຈ້ງ;
8、ການແກ້ໄຂເສັ້ນຊື່
ໃນເວລາທີ່ມໍເຕີຊ້າຍແລະຂວາກໍາລັງກ້າວໄປຂ້າງຫນ້າແລະຖອຍຫລັງ,ມີຄວາມແຕກຕ່າງໃນຄວາມໄວເບື້ອງຊ້າຍແລະຂວາ,ການຍ່າງເສັ້ນທາງກົງແມ່ນການຊົດເຊີຍ,ຫນ້າທີ່ແກ້ໄຂບັນຫາເສັ້ນທາງເສັ້ນຂອງການຄວບຄຸມໄລຍະໄກສາມາດນໍາໃຊ້ໄດ້,ປັບຄວາມໄວຂອງລໍ້ຊ້າຍແລະຂວາ;
ຫຼັກການຂອງການແກ້ໄຂ:ຜ່ານຫນ້າທີ່ແກ້ໄຂ Bias,ຄວາມໄວຫມູນວຽນທີ່ດີ,ເພື່ອບັນລຸຄວາມໄວດຽວກັນກັບລໍ້ຂວາ,ຮັບຮູ້ການປະສົມປະສານຄວາມໄວດ້ານຊ້າຍແລະຂວາ,ລົບລ້າງການຊົດເຊີຍ;
ວິທີການດໍາເນີນງານແກ້ໄຂ:ກົດປຸ່ມແລະກົດປຸ່ມ Enable,ຄ່ອຍໆຫມຸນ "ການແກ້ໄຂເສັ້ນຊື່" "Knob;
ຫມຸນໄປທາງທິດເຂັມໂມງ,ເພີ່ມຄວາມໄວໃນການຫມູນວຽນ,ມູນຄ່າການແກ້ໄຂ Deviation ເພີ່ມຂື້ນຂອງຫນ້າຈໍສະແດງ;
ຫມຸນກົງກັນຂ້າມກັນ,ຫຼຸດຜ່ອນແຮງດັນຄວາມໄວຫມູນວຽນ,ມູນຄ່າການແກ້ໄຂ Deviation ການສະແດງແມ່ນຫຼຸດລົງ;
ລະດັບການແກ້ໄຂ:ມູນຄ່າການແກ້ໄຂ -90 ເຖິງ 90;1ແຮງດັນຄວາມສະຫວ່າງຂອງຫນ່ວຍບໍລິການແກ້ໄຂຄວາມຜິດພາດຂອງແຕ່ລະປະມານ 0.04V;
9、ເມນູພາລາມິເຕີ (ຜູ້ໃຊ້ຫ້າມການດັດແປງສ່ວນຕົວ)
ໃສ່ວິທີການໃນເມນູພາລາມິເຕີ:ໃນເວລາທີ່ grinding ແມ່ນ 0,ສົ່ງຕໍ່ / ປີ້ນກັບກັນ 3 ຄັ້ງຕິດຕໍ່ກັນ,ພັກຜ່ອນ 3 ເທື່ອ;
ວິທີການອອກ:ເລືອກທີ່ຈະບັນທຶກຫຼືບໍ່,ກົດປຸ່ມ Enable ເພື່ອຢືນຢັນ;
ລະດັບສຽງທີ່ລະອຽດ:0-120;
ຄວາມໄວມາດຕະຖານ:0-3000;
ຄວາມໄວໃນເວລາຍ່າງ:0-1000;
![]()
| ການສະຫນອງພະລັງງານຂອງຜູ້ຮັບ |
DC24V / 1A (ການສະຫນອງພະລັງງານທີ່ເປັນເອກະລາດ)
|
| ການໂຫຼດຈຸດເດັ່ນຂອງເຄື່ອງຮັບ | AC0-250v / 3A DC0-30v / 5A |
| ຄວາມໄວສູງຂອງການສະຫນັບສະຫນູນຄວາມໄວ | DC0-10V |
ສິດທິສຸດທ້າຍໃນການຕີຄວາມຫມາຍຂອງຜະລິດຕະພັນນີ້ເປັນຂອງບໍລິສັດ Tengdu Xalshen ບໍລິສັດ Tongdu.。
-500x650.png)

-500x650.png)


