
ဝါယာကြိုးဖြတ်စက် အလိုအလျောက်ဖြတ်တောက်ခြင်း ကြိုးမဲ့အဝေးထိန်းခလုတ်
Wire သည်စက်ကိုအလိုအလျောက်ဖြတ်တောက်ခြင်းကြိုးမဲ့ဝေးလံခေါင်သီထိန်းချုပ်မှု DH12s-P6S
ဖေါ်ပြချက်


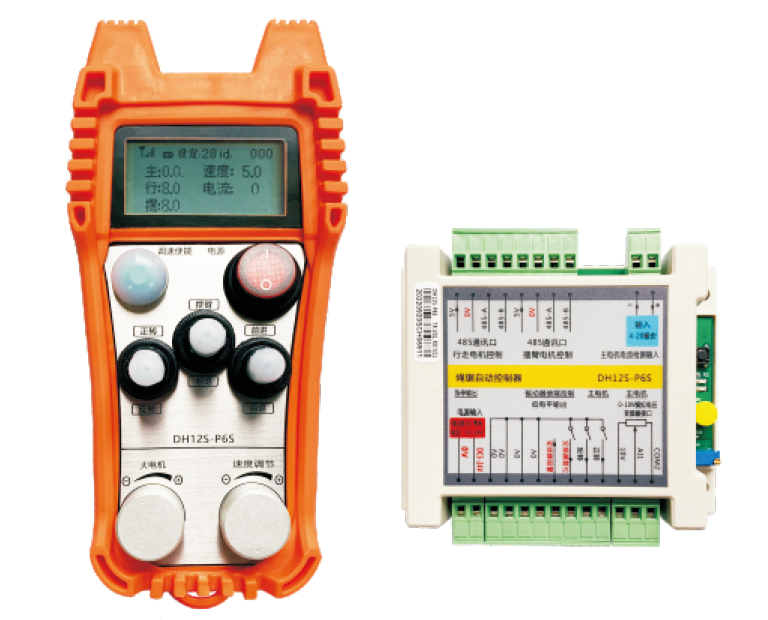
ပုံစံ:DH12S-P6S 适配设备:绳锯/片锯机


ပေြာဆို:Antennas အမျိုးအစားသုံးမျိုးကိုရွေးချယ်နိုင်သည်,ပုံမှန်စုတ်ယူခြင်းဖလားအင်တင်နာစံဖြစ်ပါတယ်


主电机速度:主:0-50
行走电机速度:行:0-50
自动切割行走电机最高限速:အရှိန်:0-30(အဆိုပါ parameters တွေကိုချိန်ညှိကြသည်)
自动切割主电机设定电流:设定:28(အဆိုပါ parameters တွေကိုချိန်ညှိကြသည်)
摆臂电机速度:摆:0-50

ဖိအားနိမ့်:ဝေးလံခေါင်သီထိန်းချုပ်မှု၏ဘက်ထရီသည်အလွန်နိမ့်သည်,ကျေးဇူးပြုပြီးဘက်ထရီကိုအစားထိုးပါ

အင်တာနက်ထဲကလဲကျလိမ့်မည်:ကြိုးမဲ့အချက်ပြပြတ်တောက်ခြင်း,ကျေးဇူးပြု. လက်ခံနိုင်သည့်ပါဝါထောက်ပံ့ရေးကိုစစ်ဆေးပါ,နောက်တဖန် power,ဝေးလံခေါင်သီထိန်းချုပ်မှုကိုပြန်လည်စတင်ပါ

1、Remote Control ကိုဖွင့်လိုက်သည်
လက်ခံမှုအပေါ် powered ဖြစ်ပါတယ်,接收器上D2电源灯常亮,D1信号灯开始闪烁;နံပါတ် 2 နံပါတ် 5 ဘက်ထရီသည်အဝေးထိန်းခလုတ်တွင်တပ်ဆင်ထားသည်,ပါဝါ switch ကိုဖွင့်ပါ,display ကိုမော်တာမြန်နှုန်းကိုပြပါ,ဆိုလိုသည်မှာ startup သည်အောင်မြင်သည်ကိုဆိုလိုသည်。
2、主电机和调速
按住“调速使能”,ရှေ့သို့ "forward / reverse" switch ကိုဖွင့်ပါ,接收器主电机正转打开;
按住“调速使能”,ရှေ့သို့ "forward / reverse" switch ကိုဖွင့်ပါ,接收器主电机正转打开;
按住“调速使能”,ပြောင်းပြန်ရန် "forward / reverse" switch ကိုဖွင့်ပါ,接收器主电机反转打开;
直接将开关扳到中间或者反向,主电机立即停止,无需按调速使能;
旋转“大电机”旋钮,可以调节接收器主电机变频器调速电压0-10V;
3、行走电机
3、行走电机
按住“调速使能”,将“前进/后退”开关扳到前进或者后退,行走电机将以高速50进行移动;
4、摆臂电机和调速
将“摆臂/后退”开关扳到摆臂或者后退,接收器的摆臂电机启动;然后旋转“速度调节”旋钮,可以调节摆臂电机速度;
按住“调速使能”,再扳动“摆臂/后退”开关,摆臂电机将以高速50移动;
5、行走电机限速调整
按住“调速使能”按钮,旋转“速度调节”可以调整自动切割时行走电机的最大限速;
6、အလိုအလျောက်ဖြတ်တောက်ခြင်း
ပထမခြေလှမ်း,启动主电机;အဆင့် 2,调整行走电机的最大限速;အဆင့် 3,将“前进/后退”开关扳动前进或者后退,进入自动切割模式;
7、参数设置(用户禁止私自修改)
parametermate menu ကိုရိုက်ထည့်ပါ:manual mode မှာ,在主电机速度为0时,Forward / Reverse switch ကို 3 ကြိမ်တက်သည်,ထို့နောက်တစ်တန်းအတွက် 3 ကြိမ်ချိုး,parametermate menu ကိုရိုက်ထည့်ပါ;
parameters တွေကို menu မှထွက်ပါ:速度调节旋钮翻页,选择保存或不保存,enable ခလုတ်ကိုနှိပ်ခြင်းဖြင့်အတည်ပြုပါ။;
额定电流:主电机电流的最大值,单位安培;
မြန်နှုန်းစည်းမျဉ်းသတ်မှတ်ချက် parameters တွေကို:အလိုအလျောက်ဖြတ်တောက်ခြင်းထိန်းချုပ်မှု parameters တွေကို,800 default,单位毫秒,ပြုပြင်မွမ်းမံတားမြစ်သည်;
deceleration parameters တွေကို:ဖြတ်တောက်ခြင်းလက်ရှိပြောင်းလဲမှုတန်ဖိုးသည်ဤတန်ဖိုးထက်ကျော်လွန်သောအခါ,开始急速减速,单位安培;
Accounteration A1:ဖြတ်တောက်ခြင်းလက်ရှိအစုဖြတ်တောက်ခြင်းထက်နိမ့်သောအခါ,行走电机每次加速增加的速度值;
Deceleration A2: ဖြတ်တောက်ခြင်းလက်ရှိအစုဖြတ်တောက်ခြင်းထက်ပိုမိုမြင့်မားသောအခါ,行走电机每次减速减少的速度值;
摆臂电流:默认值,ပြုပြင်မွမ်းမံတားမြစ်သည်;
停止时间:自动模式电流超载停机后,隔一段时间再次检测电流,如果小于设定电流,自动启动行走电机;单位秒,默认值,ပြုပြင်မွမ်းမံတားမြစ်သည်;
停止时间:自动模式电流超载停机后,隔一段时间再次检测电流,如果小于设定电流,自动启动行走电机;单位秒,默认值,ပြုပြင်မွမ်းမံတားမြစ်သည်;
အများဆုံးလက်ရှိ:主电机反馈电流的范围,单位安培;
အများဆုံးအိမ်ရှင်:遥控器主电机调速显示范围;
အများဆုံးလမ်းလျှောက်:无效参数;
မြန်နှုန်းကန့်သတ်ကန့်သတ်:အလိုအလျောက်ဖြတ်တောက်သောအခါ,遥控器显示屏行走电机限速=此参数的50%;
加灵敏度:主电机反馈电流增大时,每次增大的值超过此值,行走电机加速;
减灵敏度:主电机反馈电流减小时,每次减小的值超过此值,行走电机减速;
灵敏度偏移:加和减灵敏度参数的偏移增加量;
设定电流:အလိုအလျောက်ဖြတ်တောက်ခြင်း,主电机反馈电流的门限,超过此值,行走电机开始减速;低于此值,行走电机开始加速;单位安培;
设定电流:အလိုအလျောက်ဖြတ်တောက်ခြင်း,主电机反馈电流的门限,超过此值,行走电机开始减速;低于此值,行走电机开始加速;单位安培;
空走退出:自动模式开始时,如果主电机反馈电流小于此值,则处于空走模式,大于此值,则退出空走模式,进入切割模式,单位安培;
空载电流:自动模式开始时,如果主电机反馈电流小于此值,则处于空载模式,大于此值,则退出空载模式,进入切割模式,单位安培;
摆臂速度:摆臂电机开机初始速度;
切割模式:片锯和绳锯两种模式切换,切换后参数也对应切换;片锯模式下,遥控器显示屏增加摆臂电机,绳锯模式则没有摆臂电机;
去抖时间:主电机反馈电流超过停止电流时,将持续检测反馈电流,去抖时间就是这个持续检测的时长,超过这个时间,检测主电机电流依然超过停止电流,行走电机将停止;反之则行走电机会继续前进;
停止电流:主电机反馈电流超过此值,行走电机将停止;单位安培;
偏移默认:遥控器开机时行走电机限速的初始值=此值的50%;
![]()
| operating ပါဝါထောက်ပံ့ရေး operating |
DC24V / 1A (လွတ်လပ်သောပါဝါထောက်ပံ့ရေး)
|
| လက်ခံသူ output point load | AC0-250V/3A DC0-30V/5A |
| receiver မြန်နှုန်းစည်းမျဉ်းစည်းကမ်း output ကိုဗို့အား | dc0-10v |

ဤထုတ်ကုန်၏ နောက်ဆုံးအခွင့်အရေးကို Chengdu Core Synthetic Technology Co., Ltd.。




