
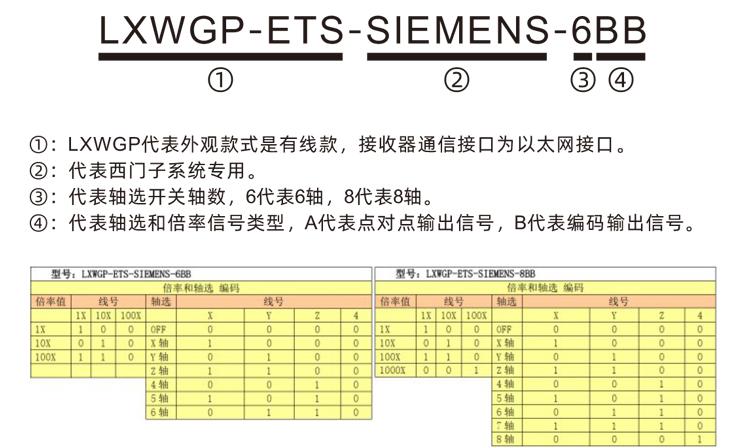
lxwgp-ets-siemens wiremens အီလက်ထရောနစ် flaiwheel
ဖေါ်ပြချက်


CNC စက်ကိရိယာများ၏ လက်စွဲလမ်းညွှန်ချက်အတွက် အီလက်ထရွန်းနစ်လက်ကိုင်ဘီးကို အသုံးပြုသည်။、အခေြအနေ、သပိတ်စစ်ဆင်ရေး。အီလက်ထရွန်းနစ်လက်ကိုင်ဘီး၏ ဤမော်ဒယ်သည် မျက်နှာပြင်အစစ်ဖြင့် Siemens ကြိုးတပ်ထားသော အီလက်ထရွန်နစ်လက်ကိုင်ဘီးဖြစ်သည်။,လက်ကိုင်ဘီးကို ကွန်ရက်ကြိုးမှတစ်ဆင့် Siemens စနစ်၏ X130 မျက်နှာပြင်သို့ ချိတ်ဆက်ထားသည်။,စနစ်သြဒိနိတ်များကိုဖတ်ပြီး S7 ပရိုတိုကော ဆက်သွယ်မှုမှတစ်ဆင့် လက်ဘီး၏ LCD မျက်နှာပြင်သို့ ပြသပါ။,လက်ကိုင်ဘီးထိန်းချုပ်မှုစနစ် ဝင်ရိုးရွေးချယ်မှုကို ဆက်သွယ်ရေးမှတစ်ဆင့် ပြုလုပ်နိုင်သည်။、ခုန်ခြင်း、ခလုတ်နှင့် အခြားအချက်ပြမှုများ。

1.6-core လေကြောင်းပလပ်ကြိုးကို အသုံးပြု၍ ချိတ်ဆက်ထားသည်။,Handwheel Cable အရှည် 10 မီတာ。
2.handwheel screen သည် system workpiece coordinates ကိုပြသနိုင်သည်။、စက်မှုသြဒိနိတ်များ、အရှိန်ကျက်、ဝင်ရိုးရွေးချယ်မှု、ချဲ့ထွင်ခြင်းကဲ့သို့သော အချက်အလက်。
3.အရေးပေါ်မှတ်တိုင်ခလုတ်ကိုထောင့်,အရေအတွက်ပြောင်းခြင်း IO signal output ကို switching,Handwheel shutdown အရေးပေါ်ရပ်တန့်ခြင်းသည် ထိရောက်ဆဲဖြစ်သည်။。
4.စိတ်ကြိုက်ခလုတ် ၆ ခုကို ပံ့ပိုးပေးသည်။,io signal ကိုပြောင်းခြင်း,IO ဝိုင်ယာကြိုး သို့မဟုတ် ဆက်သွယ်ရေးမှတဆင့် စနစ်သို့ အချက်ပြများ ထုတ်ပေးနိုင်သည်။。
5.6 သို့မဟုတ် 8 ဝင်ရိုးထိန်းချုပ်မှုကိုထောက်ပံ့သည်။,io signal ကိုပြောင်းခြင်း,IO ဝိုင်ယာကြိုး သို့မဟုတ် ဆက်သွယ်ရေးမှတဆင့် စနစ်သို့ အချက်ပြများ ထုတ်ပေးနိုင်သည်။。
6.ချဲ့ထွင်မှု ထိန်းချုပ်မှု 3 သို့မဟုတ် 4 အဆင့်ကို ပံ့ပိုးပါ။,io signal ကိုပြောင်းခြင်း,IO ဝိုင်ယာကြိုး သို့မဟုတ် ဆက်သွယ်ရေးမှတဆင့် စနစ်သို့ အချက်ပြများ ထုတ်ပေးနိုင်သည်။。
7.Pulse Pulse encoder ပံ့ပိုး,100သွေးခုန်နှုန်း / စက်ဝိုင်း,signal ကို AB pulse wiring မှတဆင့် system သို့ output လုပ်နိုင်သည်။。
8.Siemens S7 Protocol ကိုထောက်ပံ့ပါ,Siemens 828D ကို ထောက်ပံ့ပေးသည်။、840DSL、ONE နှင့် အခြားသော မော်ဒယ်စနစ်များ。

| Handwheel အလုပ်လုပ်သော ပါဝါထောက်ပံ့မှု ဗို့အား | DC24V/1A |
| Power Power Supply ဗို့အား | DC24V/1A |
| လက်ခံသူ IO အထွက်ဝန်အပိုင်းအခြား |
DC24V
|
| Handwheel ကြိုးအရှည် |
10ဍ
|
| လက်ခံသူအဆုံး ကြိုးအရှည် |
1ဍ
|
| လက်ခံသူအဆုံး ကွန်ရက်ကြိုးအရှည် |
3ဍ
|
| operating အပူချိန် |
-25℃<x<55℃
|
| ဆန့်ကျင် anti- ကျဆုံးခြင်း |
1ဍ
|
| ခလုတ်အရေအတွက်ကိုစိတ်ကြိုက် | 6မရေွှးသော |
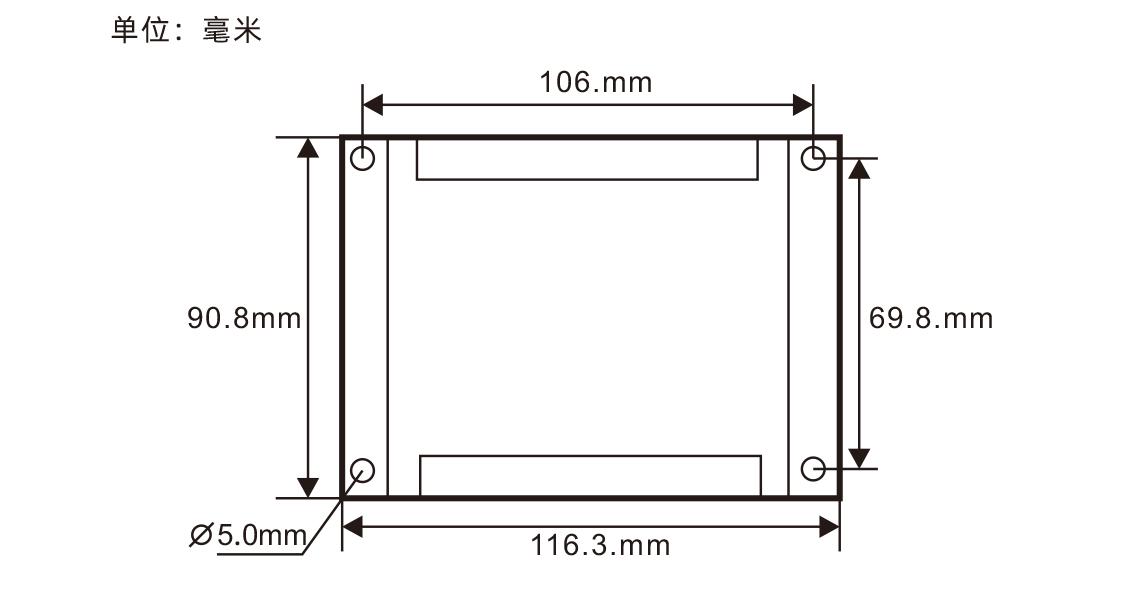
| ကုန်ပစ္စည်းအရွယ်အစား | 233*90.7*77.4(MM) |


မှတ်ချက်များ:
①emergencomen stop ခလုတ်:
အရေးပေါ်မှတ်တိုင်ကိုနှိပ်ပါ,လက်ခံသူအပေါ်အရေးပေါ်အခြေအနေ IO output နှစ်ခုအုပ်စုများသည်အဆက်ပြတ်နေကြသည်,နှင့်လက်ကိုင်၏လုပ်ဆောင်ချက်များကိုမမှန်ကန်ပါ。
အရေးပေါ်မှတ်စုဖြန့်ချိပြီးနောက်,အရေးပေါ်အခြေအနေ IO output ကိုလက်ခံသူတွင်ပိတ်ထားသည်,အဆိုပါလက်ကိုင်၏လုပ်ဆောင်ချက်များကို restored နေကြသည်。
②screen display ကို:
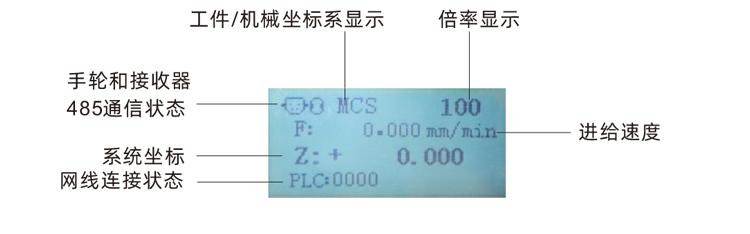
PLC:0000ဆိုလိုသည်မှာ ကွန်ရက်ကြိုးကို ချိတ်ဆက်ထားခြင်းမရှိပါ။,PLC:1010ဆိုလိုသည်မှာ ကွန်ရက်ကြိုးနှင့် PLC စနစ်အား အောင်မြင်စွာ ချိတ်ဆက်ထားသည်ဟု ဆိုလိုသည်။,
PLC:1110handwheel သည် စနစ်ဒေတာကို အောင်မြင်စွာရေးသားကြောင်း ညွှန်ပြသည်။,PLC:0001ကွန်ပြူတာသို့ အောင်မြင်စွာချိတ်ဆက်မှုကို ညွှန်ပြသည်။。
③customခလုတ်:
6စိတ်ကြိုက်ခလုတ်များ,ခလုတ်တစ်ခုစီသည်လက်ခံသူအပေါ် IO output ကိုညွှန်ပြခြင်းနှင့်ကိုက်ညီသည်,ဆက်သွယ်ရေးစနစ်ဖြင့်လည်း ချိတ်ဆက်ထားသည်။。
④axis selection switch:
Axis Selection switch switching switching switching adwerwheel မှထိန်းချုပ်သောဝင်ရိုးကိုပြောင်းနိုင်သည်。
⑤ ခလုတ်ကို ဖွင့်ပါ။:
နှစ်ဖက်စလုံးတွင် enable ခလုတ်ကို နှိပ်. ဖိထားပါ,၎င်းသည်သွေးခုန်နှုန်း encoder ကိုလှုပ်ခြင်းဖြင့်သာထိရောက်မှုရှိသည်。 နှင့်လက်ခံသူအပေါ် enabled io output ကို 2 အစုံအပေါ်လှည့်နေကြသည်,Enable ခလုတ်ကိုလွှတ်လိုက်ပါ,IO io output disonnection ကို enable。
⑥ ချဲ့ထွင်မှုခလုတ်:
ကြိုးခလုတ်ကိုပြောင်းခြင်းကိုလက်ဘီးဖြင့်ထိန်းချုပ်ထားသောချဲ့ခြင်းကိုပြောင်းနိုင်သည်။。
⑦Pulse ကုဒ်နံပါတ်:
Enable ခလုတ်ကို နှိပ်. ဖိထားပါ,လှုပ်သွေးခုန်နှုန်း encoder,သွေးခုန်နှုန်း signal ကိုပို့ပါ,စက်ရိုးတံလှုပ်ရှားမှုကိုထိန်းချုပ်ပါ。
⑧လက်ကိုင်ဘီးကြိုး:
Handwheel နှင့် Receiver ချိတ်ဆက်ထားသော Cable,လေကြောင်းပလပ်,handwheel power supply နှင့် communication အတွက်。



6.1ကုန်ပစ္စည်းတပ်ဆင်ခြင်းအဆင့်များ
1.လေးထောင့်ရှိ ဝက်အူအပေါက်များမှတဆင့် လျှပ်စစ်ဗီရိုအတွင်း လက်ခံကိရိယာကို တပ်ဆင်ပါ။。
2.ကျွန်ုပ်တို့၏ receiver ဝါယာကြိုးပုံကိုကြည့်ပါ,သင်၏ On-site ကိုပစ္စည်းကိရိယာများကိုနှိုင်းယှဉ်ကြည့်ပါ,ကြိုးနှင့် လက်ခံကိရိယာမှတဆင့် စက်ပစ္စည်းကို ချိတ်ဆက်ပါ။
ချိတ်ဆက်ပါ။,လက်ခံသူကို စနစ်၏ X130 အင်တာဖေ့စ်သို့ ချိတ်ဆက်ရန် ကွန်ရက်ကြိုးကို အသုံးပြုပါ။。
3.လက်ခံပြီးနောက် fixed သည်,ဘောင်ပေါ်ရှိ လက်ကိုင်ဘီးအဖွင့်တွင် လေကြောင်းပလပ်ခုံကို တပ်ဆင်ပါ။,နောက်တစ်မျိုး
terminal strip သည် receiver ရှိ handwheel interface သို့ ပလပ်ထိုးထားသည်။。ထို့နောက် လက်ဘီးအဆုံးကြိုး၏ လေကြောင်းပလပ်ကို အောက်ခံထဲသို့ ထည့်ပါ။,ကြပ်
တန်ဆာပလာများ。
6.2စာရင်းထည့်သွင်းအရွယ်အစား
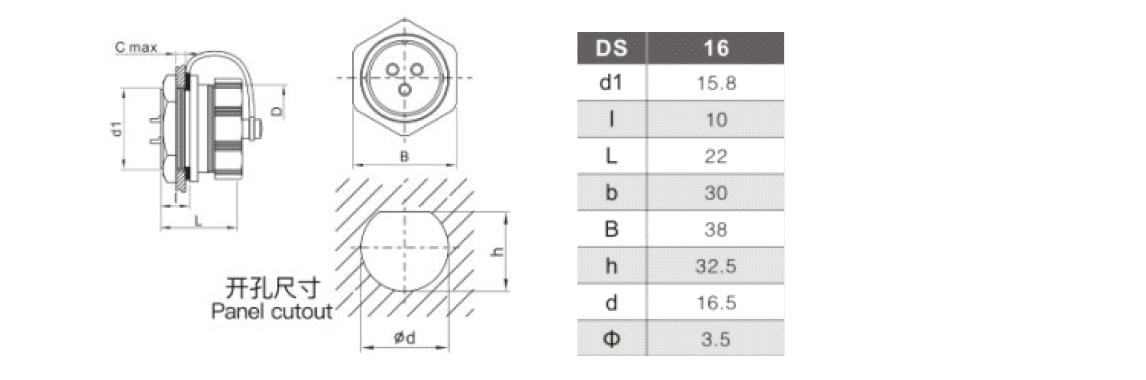
6.3လေကြောင်းပလပ်တပ်ဆင်မှုအတိုင်းအတာ
6.4လက်ခံသူဝါယာကြိုးရည်ညွှန်းပုံ

6.2စာရင်းထည့်သွင်းအရွယ်အစား
6.3လေကြောင်းပလပ်တပ်ဆင်မှုအတိုင်းအတာ
6.4လက်ခံသူဝါယာကြိုးရည်ညွှန်းပုံ

1.လက်ခံမှုအပေါ် powered ဖြစ်ပါတယ်,operating light operating light အပေါ်ဖြစ်ပါတယ်,ကွန်ရက်ကြိုးကို အသုံးပြု၍ လက်ခံသူအား ကွန်ပျူတာနှင့် ချိတ်ဆက်ပါ။,သင့်ကွန်ပျူတာအတွက် သတ်မှတ်ထားသော IP လိပ်စာကို သတ်မှတ်ပါ။,handwheel လုပ်ဆောင်ချက်အတွက် ကွန်ရက်ဘောင်ကန့်သတ်ချက်များကို သတ်မှတ်ရန် ကွန်ရက်ဖွဲ့စည်းပုံတူးလ်ဆော့ဖ်ဝဲကို အသုံးပြုပါ။,သီးခြားဆက်တင်များ
နည်းလမ်းအတွက်၊ "LXWGP-ETS Wired Handwheel အသုံးပြုမှုအတွက် လမ်းညွှန်ချက်များ" ကို ဖတ်ရှုပါ။。
2.လက်ခံသူစနစ်ထည့်သွင်းမှုပြီးပါက,စနစ်သည် ပရိုဂရမ် PLC ပရိုဂရမ် လိုအပ်သည်။,အသေးစိတ်အတွက်၊ ကျေးဇူးပြု၍ "LXWGP-ETS Setting Methods for Different Siemens CNC Systems" နှင့် PLC ပရိုဂရမ်လုပ်ရိုးလုပ်စဉ်အချက်အလက်များကို ဖတ်ရှုပါ။。
3.အပေါ်က setting တွေပြီးသွားပါပြီ။,လက်ခံကိရိယာကို စက်လျှပ်စစ်ပုံးထဲသို့ယူ၍ တပ်ဆင်ပါ။,ကွန်ပျူတာမှ ကွန်ရက်ကြိုးကို ဖြုတ်ပြီး စနစ်၏ X130 အင်တာဖေ့စ်တွင် ပလပ်ထိုးပါ။,လက်ခံသူပါဝါနှင့် သွေးခုန်နှုန်းဝိုင်ယာများကို တပ်ဆင်ပါ။。
4.စက် powered ဖြစ်ပါတယ်,လက်ခံမှုအပေါ် powered ဖြစ်ပါတယ်,operating light operating light အပေါ်ဖြစ်ပါတယ်,လက်ဘီးပါဝါခလုတ်ကို ဖွင့်ပါ။,Handwheel မျက်နှာပြင် boot,မျက်နှာပြင်ပြသမှု PLC:1010,လက်ကိုင်ဘီးနှင့် စနစ်ကြား အောင်မြင်သော ဆက်သွယ်မှုကို ညွှန်ပြသည်။。
5.ဝင်ရိုးရွေးချယ်မှုကို ရွေးပါ။:Switch Axle Selection switch,သင်လည်ပတ်လိုသောဝင်ရိုးကိုရွေးပါ。
6.Multiplier ကိုရွေးချယ်ပါ:ချဲ့ကြည့်ပါ,သင်လိုအပ်သည့်မြှောက်ဖွဲ့မှုကိုရွေးချယ်ပါ。
7.0 င်ရိုးကိုရွှေ့ပါ:Enable ခလုတ်ကို နှိပ်. ဖိထားပါ,0 င်ရိုးနှင့် switch ကိုရွေးချယ်ပါ,Multiplier switch ကိုရွေးချယ်ပါ,ထို့နောက်သွေးခုန်နှုန်း encoder လှည့်ပါ,လက်ယာရစ်ရှေ့ဆက်လှုပ်ရှားမှုဝင်ရိုးကိုဖွင့်ပါ,အနုတ်လက်ခဏာလှုပ်ရှားမှုဝင်ရိုးယာလက်ယာရစ်လက်ယာရစ်ကိုလှည့်ပါ。
8.မည်သည့်စိတ်ကြိုက်ခလုတ်ကိုနှိပ်ပြီးကိုင်ထားပါ,လက်ခံသူ၏သက်ဆိုင်ရာခလုတ် io output ကိုဖွင့်ထားသည်,ထုတ်ပြန်ရန်ခလုတ် output ကိုပိတ်ပါ。
9.အရေးပေါ်မှတ်တိုင်ကိုနှိပ်ပါ,လက်ခံသူသည်အရေးပေါ်အခြေအနေ IO output ကို disconnects,handwheel function ကိုပျက်ကွက်,အရေးပေါ်မှတ်တိုင်ကိုလွှတ်လိုက်ပါ,အရေးပေါ်အခြေအနေ IO output ကိုပိတ်လိုက်သည်,functheel function ကိုပြန်လည်နာလန်ထူ。


| အမှားအယွင်း | ဖြစ်နိုင်သောအကြောင်းမရှိ |
ပြ esh နာဖြေရှင်းနည်းများ
|
|
|
ပြ esh နာဖြေရှင်းနည်းများ
|
1.လက်ကိုင်ဘီးနှင့် လက်ခံသူကြားရှိ လေကြောင်းကေဘယ်ကြိုးကို မှန်ကန်၍ ယုံကြည်စိတ်ချစွာ ချိတ်ဆက်ထားခြင်း ရှိ၊ မရှိ၊
2.လက်ခံသူပါဝါဗို့အား လုံလောက်ပါသလား။
3.လက်သမား
|
1.လက်ကိုင်ဘီးနှင့် လက်ခံသူကြားရှိ လေကြောင်းကေဘယ်လ်ချိတ်ဆက်မှုကို စစ်ဆေးပါ။
2.လက်ခံသူ အဝင်ပါဝါကို စစ်ဆေးပါ။
3.ပြုပြင်ထိန်းသိမ်းမှုအတွက်စက်ရုံသို့ပြန်သွားရန်ထုတ်လုပ်သူနှင့်ဆက်သွယ်ပါ
|
|
| လက်ကိုင်ဘီးကို လည်ပတ်သည့်အခါ တုံ့ပြန်မှု မရှိပါ။ |
1.လက်ခံသူနှင့် စနစ်ကြားရှိ ကွန်ရက်ကြိုးများ ချိတ်ဆက်နေပါသလား။
2.စနစ် PLC ပရိုဂရမ်ကို ကောင်းမွန်စွာ ရေးထားပါသလား။
3.လက်ခံသူ ဖွဲ့စည်းမှုပုံစံကို မှန်ကန်စွာ သတ်မှတ်ပါသလား။
4.Handwheel မျက်နှာပြင်ပေါ်တွင် ပြသထားသော 485 ဆက်သွယ်ရေးသင်္ကေတ မအောင်မြင်ပါ။
5.အဆိုပါလက်သမား operating အခါ,နှစ်ဖက်စလုံးရှိ ဖွင့်ရန်ခလုတ်များကို နှိပ်၍ ဖိထားရန် လိုအပ်သည်။
6.အရေးပေါ် ရပ်တန့်ခလုတ်ကို လွှတ်ထားပါသလား။
|
1.လက်ခံသူနှင့် စနစ် X130 ကွန်ရက်ပေါက်ကို ကွန်ရက်ကြိုးဖြင့် ချိတ်ဆက်ထားခြင်း ရှိမရှိ စစ်ဆေးပါ။
2.ကျွန်ုပ်တို့ပေးထားသော အကိုးအကားပစ္စည်းများအရ စနစ် PLC ကို ရေးထားခြင်းရှိမရှိ စစ်ဆေးအတည်ပြုပါ။
3.လက်ခံသူသည် ကျွန်ုပ်တို့၏ အချက်အလက်နှင့် ပံ့ပိုးပေးထားသည့် တူးလ်ဆော့ဖ်ဝဲကို ရည်ညွှန်းခြင်းရှိမရှိ စစ်ဆေးပါ။,လက်ခံသူ၏ ကွန်ရက်ဘောင်ဘောင်များနှင့် DB လိပ်စာ စသည်တို့ကို မှန်ကန်စွာ သတ်မှတ်ပါ။
4.လက်ကိုင်ဘီးနှင့် လက်ခံကိရိယာကြားကို စစ်ဆေးပါ။
6core အစိမ်းရောင် socket,ဆက်သွယ်ရေးလိုင်းနှစ်ခု:485-A နှင့် 485-B,မှန်ကန်ပြီး လုံခြုံစွာ ချိတ်ဆက်ထားပါသလား။,ပတ်လမ်းပြတ်တောက်မှု ရှိပါသလား။
|
|
|
လက်ခံပြီးနောက်အပေါ် powered ဖြစ်ပါတယ်,လက်ခံသူပေါ်ရှိ အလုပ်မီးသည် မီးမလင်းပါ။
|
1.ပါဝါထောက်ပံ့ရေးမူမမှန်
2.ပါဝါဝါယာကြိုးအမှား
3.ပျက်ကွက်ပျက်ကွက်
|
1.ပါဝါထောက်ပံ့ရေးတွင်ဗို့အားရှိမရှိစစ်ဆေးပါ,
ဗို့အားသည်လိုအပ်ချက်များကိုဖြည့်ဆည်းပေးပါသလား
2.power supply ၏အပြုသဘောနှင့်အပျက်သဘောဆောင်သောထမ်းပိုးများကိုပြောင်းပြန်ချိတ်ဆက်ထားခြင်းရှိမရှိစစ်ဆေးပါ
3.စက်ရုံပြုပြင်ထိန်းသိမ်းမှုကိုပြန်သွားပါ
|

1.အခန်းအပူချိန်နှင့်ဖိအားမှာပေးပါ,ခြောက်သွေ့သောပတ်ဝန်းကျင်တွင်အသုံးပြုခဲ့သည်,ဝန်ဆောင်မှုဘဝတိုးချဲ့。
2.ကျေးဇူးပြုပြီးမိုးရှာနေတဲ့ရေစိုဖို့ရှောင်ပါ、ထိုကဲ့သို့သောအရည်ကြည်ဖုအဖြစ်ပုံမှန်မဟုတ်သောပတ်ဝန်းကျင်များတွင်အသုံးပြုခဲ့သည်,ဝန်ဆောင်မှုဘဝတိုးချဲ့。
3.ကျေးဇူးပြုပြီးလက်ကိုသန့်ရှင်းအောင်ထားပါ,ဝန်ဆောင်မှုဘဝတိုးချဲ့。
4.ကျေးဇူးပြုပြီးညှစ်ပါ、ဆောင်းဉီးရာသီ、Bumping စသည်ဖြင့်,ထိခိုက်ပျက်စီးမှုသို့မဟုတ်တိကျမှန်ကန်မှုအမှားများမှလက်ထဲအတွင်းရှိတိကျသောဆက်စပ်ပစ္စည်းများကာကွယ်ခြင်း。
5.အချိန်ကြာမြင့်စွာမသုံးပါ,ကျေးဇူးပြုပြီးသန့်ရှင်း။ လုံခြုံသောနေရာ၌လက်ဖြည့်ပါ。
6.သိုလှောင်မှုနှင့်သယ်ယူပို့ဆောင်ရေးတွင်အစိုဓာတ်ကိုအထောက်အကူပြုခြင်းနှင့်ထိတ်လန့်ဖွယ်အထောက်အထားများကိုဂရုပြုပါ。

1.အသုံးမပြုမီအသုံးပြုရန်ညွှန်ကြားချက်များကိုအသေးစိတ်ဖတ်ပါ,ပရော်ဖက်ရှင်နယ်မဟုတ်သောပုဂ္ဂိုလ်များအားတားမြစ်သည်。
2.လက်ဘီးတွင် ပုံမှန်မဟုတ်သော အခြေအနေတစ်ခုခု ဖြစ်ပေါ်ပြီးနောက်,ကျေးဇူးပြု၍ ၎င်းကိုချက်ချင်းအသုံးမပြုပါနှင့်,ပြဿနာဖြေရှင်းပါ။,ပြဿနာဖြေရှင်းခြင်းမပြုမီ,မှားယွင်းနေသော လက်ကိုင်ဘီးကို ထပ်မံအသုံးပြုရန် တားမြစ်ထားသည်။,အမည်မသိ လက်ကိုင်ဘီးချို့ယွင်းမှုကြောင့် ဘေးကင်းသော မတော်တဆမှုများကို ရှောင်ကြဉ်ပါ။;
3.ပြုပြင်ရန်လိုအပ်လျှင်,ကျေးဇူးပြုပြီးထုတ်လုပ်သူကိုဆက်သွယ်ပါ,Self- ပြုပြင်ခြင်းကြောင့်ဖြစ်ရတဲ့ပျက်စီးဆုံးရှုံးမှုလျှင်,ထုတ်လုပ်သူကအာမခံပေးလိမ့်မည်မဟုတ်ပါ。
.png)

.png)


