
Kambla di kòrtamentu outomatiko di kòntròl remoto di waya zaag .
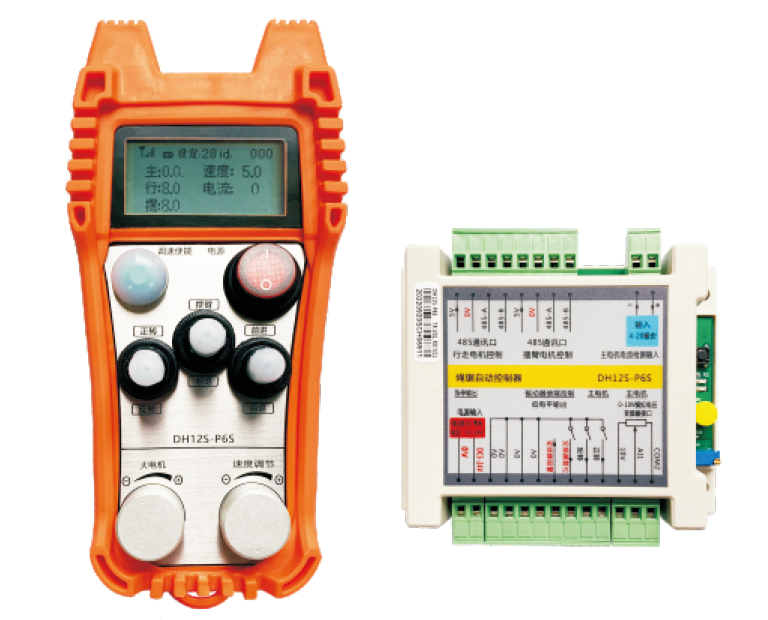
Kortamentu outomátiko di kòntròl remoto sin kabel di mashin di zaag di waya DH12S-P6S .
Deskripshon


modelo:Ekiponan di adaptador di DH12S-P6S:Mashin di zaag di waya zaag/blade


Remarká:Tres tipo di antena por wòrdu selektá .,E antena di succion di succion predetermina ta ekipa cu standard .


Velocidad di motor principal .:anfitrion:0-50
Velocidad di motor di biahe:OK:0-50
Limite di velosidat máksimo di biahe di kòrtamentu outomatiko:velosidat:0-30(E parameternan ta ahustabel)
Kortamentu di koriente di motor prinsipal di kòrtamentu outomátiko:establesé:28(E parameternan ta ahustabel)
Swing velosidat di motor di brasa:pone:0-50

Preshon abou:E bateria di e kòntròl remoto ta muchu abou .,Por fabor reemplasa e bateria .

Cai for di internet:Interupshon di señal sin kabel,Por fabor check e fuente di coriente di e receiver .,Poder riba atrobe,Restart e kòntròl remoto .

1、Control remoto a bira riba .
E recibidor ta wordo alimenta riba .,E luz di coriente di D2 riba e recibidor semper ta riba .,Luz di señal D1 ta cuminsa flash .;Dos bateria No. 5 instalá riba e kòntròl remoto .,Bira riba e switch di coriente .,Mustra velosidat di motor di display,E ta nifiká ku e startup ta eksitoso .。
2、Regulashon di motor i velosidat prinsipal
Prensa i tene "Control di velosidat activa".,Bira e switch "Forward/Reverse" pa dilanti .,E motor principal di e receiver ta draai dilanti y ta bira riba .;
Prensa i tene "Control di velosidat activa".,Bira e switch "Forward/Reverse" pa dilanti .,E motor principal di e receiver ta draai dilanti y ta bira riba .;
Prensa i tene "Control di velosidat activa".,Bira e switch di "Fanda/Reverso" pa reverse .,Ontvanjeer principal motor ta reverse y ta bira riba .;
Simplemente move e switch pa meimei òf reverse .,E motor principal ta para mesora .,No mester primi kontrol di velosidat pa permití;
Bira e knob di "Motor Grandi",E recibidor principal di motor di inverter di regulacion di voltahe por ta ahusta 0-10V .;
3、Motor di biahe
3、Motor di biahe
Prensa i tene "Control di velosidat activa".,Move e switch "dilanti/inverso" pa dilanti of atras,E motor di camina lo move cu un velocidad halto di 50 .;
4、Swing brasa di motor i regulashon di velosidat
Bira e switch di "Brasa di Swing/Reverse" pa brasa di swing of reverse .,E motor di brasa di swing di Ricibidor ta cuminsa .;Despues bira e knob di "Ahustashon di Velosidat",Velocidad di motor di brasa di swing por wordo ahusta .;
Prensa i tene "Control di velosidat activa".,Despues flip e switch di “swing brasa/reverso”,E motor di brasa di swing lo move cu un velocidad halto di 50 .;
5、Ahustashon di límite di velosidat di motor di biahe
Prensa y tene e boton "Aves di Velocidad" .,Bira "Ahustashon di Velosidat" pa ahusta e límite di velosidat máksimo di e motor ku ta biaha durante kòrtamentu outomatiko.;
6、Kortamentu outomátiko
promé paso,Kuminsá e motor prinsipal;Stap 2 .,Ahusta e límite máksimo di velosidat di e motor ku ta biaha;Etapa 3 .,Bira e switch "dilanti/inverso" pa bay dilanti of atras .,Introdusí e modo di kòrtamentu outomatiko;
7、Configuracionnan di parameter (usuarionan ta prohibi di modifica nan den priva)
Introdusí e menú di parameter .:Den modo manual,Ora cu e velocidad principal di e motor ta 0.,Switch delantero/inverso ta bent up 3 biaha den un fila,Despues kibra esaki 3 biaha den fila .,Introdusí e menú di parameter .;
Sali for di e Menu di Parameternan:Ahuste di velosidat di ahuste di knob birando,Skohe pa spar òf no spar .,Druk riba e boton habilitá pa konfirmá .;
Agrupá aktualmente:Balor máksimo di koriente di motor prinsipal,Unidad Ampere;
Parameternan di regulashon di velosidat:Parameternan di kòntròl di kòrta outomátiko,Default 800,Milisegudo di unidad,Modifikashon ta prohibí;
Parameternan di desacelerashon:Ora e balor di kambio di koriente di kòrtamentu ta surpasá e balor aki .,Kuminsá desacelerando rápidamente,Unidad Ampere;
Aceleracion a1.:Ora e koriente di kòrta ta mas abou ku e koriente di kòrtamentu di set .,E balor di velocidad a aumenta cu cada aceleracion di e motor di cana .;
Deselerashon a2.: Ora e koriente di kòrta ta mas haltu ku e koriente di kòrtamentu di set .,E balor di velosidat redusí dor di kada desacelerashon di e motor di kana .;
Swing actual di brasa:balor predeterminá,Modifikashon ta prohibí;
Ora:Despues di shutdown pa motibu di sobrekarga aktual den modo outomatiko .,Check e coriente atrobe despues di un periodo di tempo .,Si e ta menos cu e coriente set .,Automátikamente kuminsá e motor di kana;Unidad di dos,balor predeterminá,Modifikashon ta prohibí;
Ora:Despues di shutdown pa motibu di sobrekarga aktual den modo outomatiko .,Check e coriente atrobe despues di un periodo di tempo .,Si e ta menos cu e coriente set .,Automátikamente kuminsá e motor di kana;Unidad di dos,balor predeterminá,Modifikashon ta prohibí;
Koriente máksimo:Rango di koriente di koriente di koriente di motor prinsipal,Unidad Ampere;
Ehérsito máksimo:Remoto di kontrol di velosidat prinsipal di velosidat di motor;
Kaminata máksimo:Parameter inválido .;
Ofisina di límite di velosidat:Ora di kòrta outomatikamente,Limite di velosidat di motor di kòntròl remoto = 50% di e parameter aki .;
Agregá sensibilidat:Ora e koriente prinsipal di retroalimentashon di motor ta oumentá .,Cada biaha e balor ta aumenta mas leu cu e balor aki .,Aceleracion motorico di biahe;
Redusí sensibilidat:Ora e koriente prinsipal di retroalimentashon motoriko baha .,Cada biaha e balor ta baha cu mas cu e balor aki .,Deselerashon di motor di biahe;
Kongunta di sensibilidat:Incremento di compensacion pa parameternan di sensibilidad plus y menos;
fihá aktual:Kortamentu outomátiko,Drempel di koriente prinsipal di feedback di motor,surpasa e balor aki .,E motor di camina ta cuminsa baha velocidad .;bou di e balor aki,E motor di camina ta cuminsa acelera .;Unidad Ampere;
fihá aktual:Kortamentu outomátiko,Drempel di koriente prinsipal di feedback di motor,surpasa e balor aki .,E motor di camina ta cuminsa baha velocidad .;bou di e balor aki,E motor di camina ta cuminsa acelera .;Unidad Ampere;
bashí salida:Ora e modo outomatiko kuminsá,Si e koriente prinsipal di feedback di motor ta ménos ku e balor aki .,ta den modo di idling .,mas grandi ku e balor aki,despues sali di modo di idling .,Introdusí e modo di kòrta,Unidad Ampere;
No-karga aktual:Ora e modo outomatiko kuminsá,Si e koriente prinsipal di feedback di motor ta ménos ku e balor aki .,ta den modo di no-karga,mas grandi ku e balor aki,despues sali di e modo di no-carga .,Introdusí e modo di kòrta,Unidad Ampere;
Velocidad di brasa swing:Velocidad di startup di motor di brasa swing;
modo di kòrta:Cambia entre e modonan di zaag di blade y waya .,Despues di cambia, e parameternan tambe lo cambia di acuerdo.;Den modo di zaag blade .,Un motor di brasa di swing ta wòrdu agregá na e display di kòntròl remoto .,E modo di zaag di waya no tin un motor di brasa di swing.;
Debuntuá tempu:Ora e koriente prinsipal di feedback di motor surpasá e koriente di parada .,Lo detektá kontinuamente e koriente di feedback,E tempu di debat ta e durashon di e detekshon kontinuo aki.,surpasá e biaha aki,Detecta cu e coriente di motor principal ainda ta surpasa e coriente di parada .,kanaE motor lo stop .;De lo contrario, e motor di cana lo sigui bay dilanti .;
stòp aktual:E koriente prinsipal di feedback di motor ta surpasá e balor aki .,E motor di biahe lo stop .;Unidad Ampere;
compensa default:E balor inisial di e límite di velosidat di motor di kana ora e kòntròl remoto ta sende = 50% di e balor aki .;
![]()
| Ontvanger di suministro di koriente operativo |
DC24V/1A (suplemento di koriente independiente)
|
| Karga di punto di salida di reseptor | AC0-250V/3A DC0-30V/5A |
| E voltahe di salida di velosidat di reseptor | DC0-10V |

E derecho final pa interpretá e produkto aki ta pertenesé na e Ko. di Teknologia di Xinshen Chengdu, Ltd.。
-500x650.png)



-500x650.png)
