
Kortamentu outomátiko kòrtamentu di kòntròl remoto sin kabel pa korda di crawler zaag
DH12S-2R-LD-485 korda di crawler a mira kòrtamentu di kòntròl remoto
Deskripshon


Cortamento automatico di control remoto pa zaag di waya di crawler adecua pa mashinnan di corta waya di crawler,Uza 485 Modbus protokòl RTU pa kontrol,Como tambe gran frecuencia motorico di conversion di velosidat di kòntròl i kontroladó di direkshon drechi dilanti di drechi .。E koriente operativo di e inverter di motor grandi por wòrdu les,Análisis i komparashon di e koriente di motornan grandi .,Ahusta automaticamente e velocidad di pista robes y drechi den tempo real .,Implementá funshon di kòrtamentu outomatiko。

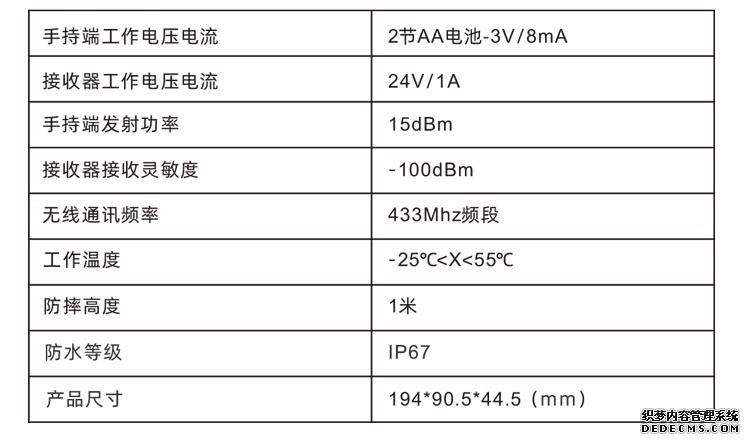
1.Adoptá 433MHZ di komunikashon sin kabel di komunikashon.,Distansia di operashon sin kabel 100 meter .。
2.Adopta funshon di hopi frekuensha di frekuensha,Uza 32 set di kòntròl remoto sin kabel na mes momentu .,No tin efecto riba otro .。
3.Sostené tur konvertidó di frekuensha ku protokòl di 485-Modbus RTU .,Actualmente marcanan di inverter adapta ta inclui .: Shanghai Xielin、Fuji、Huichuan、Zhongchen、Enkargá、Yaskawa Tatsu。Si bo no tin un marka, por fabor tuma kontakto ku nos pa personalisá esaki.。
4.Sostens inicio di inverternan di motor grandi .、Ahustashon di velosidat、Actual Lesa。
5.Sostené regulashon di velosidat di inverternan di crawler robes i drechi、start up、Dilanti, patras, robes i drechi kòntròl。
6.Sostené korekshon di desviashon lineal di inverternan di crawler robes i drechi,Mantene e mashin coriendo den un liña recto .。
7.Sostené funshon di kòrtamentu outomatiko di zaag di waya,Di akuerdo ku e informashon motoriko grandi di koriente .,Ahusta automaticamente e velocidad di pista robes y drechi den tempo real .。
8.Tambe e ta sostené direk IO salida pa kontrolá e start-stop di e motor .,Salida di voltahe analógiko ta kontrolá velosidat di motor .。



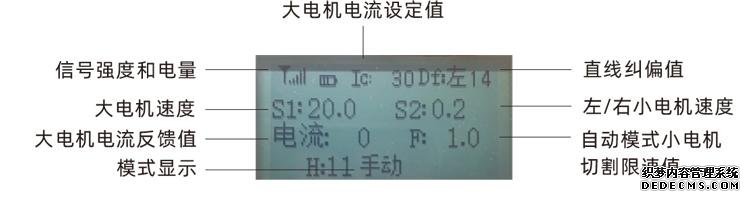
Komentarionan: Display di pantaya:
Switch di modo:
Uza switch di 2 velocidad .,Bo por kambia entre e modonan outomatiko i manual,Lo tin un switch di modo korespondiente riba e pantaya di display .。
6 Habilitá:
Botonnan di kombinashon,Algun operashon ta rekerí bo pa primi i tene e boton habilitá pa operá .,Wak e instrukshonnan pa kada switch .。
Switch di motor grandi:
Uza switch di reset di 3 velosidat,Bira e switch aki .,Por kontrolá dilanti i reverso rotashon di motornan grandi .,Despues di laga bai, estado lo keda .,Lo tin un display korespondiente riba e pantaya di display .,↑Fecha ta indiká rotashon positivo,↓Fecha ta indiká reversal .。
Switch chikito dilanti/inverso switch:
Adopta 3 velosidat di switch di trancamento propio,Bira e switch aki .,Por kontrolá e adelanto i atras di motornan chikitu .,Lo tin un display korespondiente riba e pantaya di display .,↑Fecha ta indiká progreso .,↓Fecha ta indiká atras。
Switch di koriente di kòntròl remoto:
E balor di velocidad di e motor grandi ta cambia cu mas o menos 0.2 unidad ., Uza e knob di encoder di multi-turn,Rota e knob,Ahusta e velocidad grandi di motor S1.。1 kaha pa rotashon, Rotashon lihé por modifiká lihé e balor grandi di velosidat di motor。
6 Switch di biramentu di motor chikí:
Uza switch di reset di 3 velosidat,Bira e switch aki den modo manual .,Por controla e birada robes y drechi di e motor chikito .,Despues di relahá, e kòntròl remoto lo stòp e akshon aki outomatikamente .。 Den e estado di adelanto .,Bira e switch aki .,Lo tin un display korespondiente riba e pantaya di display .,← Flechanan ta indica turno na man robes .,→Fecha kiermen bira na man drechi。 Den e estado atrasá,Bira e switch aki .,Lo tin un display korespondiente riba e pantaya di display .,← Flechanan ta indica turno na man robes .,→Fecha kiermen bira na man drechi。 Prensa e hold .,Despues bira e switch .,Por hasi funshon di bira riba e sitio .,Bira mas lihé。
3 Regulacion grandi di velocidad di motor . :
E balor di velocidad di e motor grandi ta cambia cu mas o menos 0.2 unidad ., Uza e knob di encoder di multi-turn,Rota e knob,Ahusta e velocidad grandi di motor S1.。1 kaha pa rotashon, Rotashon lihé por modifiká lihé e balor grandi di velosidat di motor。
6 Reglamento di velocidad di motor chikito:
(Derecha korekshon di liña) Usa e knob di enkoder di multi-turn,Den modo manual,Un kaha pa kada rotashon di knob .,E balor di velocidad di e motor chikito ta cambia cu mas o menos 0.1 unidad .,Rotashon lihé por modifiká lihé e balor di velosidat di motor chikitu .。Den modo outomatiko,Druk riba e boton di habilitá .,Despues bira 1 bloki cada biaha .,E balor di límite di velosidat F di e motor chikitu ta kambia ku mas o ménos 0.1 unidat .,Rotashon lihé por modifiká lihé e límite di velosidat di motornan chikitu .。Druk riba e boton di habilitá .,Bira knob drechi,Display di korekshon lineal:Df:robes,Agregá 1 unidat pa unidat di knob .;Bira knob robes .,Display di korekshon lineal:Df:korekto,Agregá 1 unidat pa unidat di knob .;Kada unidat di korekshon di desviashon ta korespondé ku e regulashon di velosidat di motor voltahe di AVI di mas o ménos 0.02V .。



Pasonan di instalashon di produkto
1.Instala e recibidor den e armario di coriente door di e snap-on riba e parti patras .,Of instala esaki den e armario di coriente door di e buraconan di schroef na e cuater skinanan di e recibidor.。
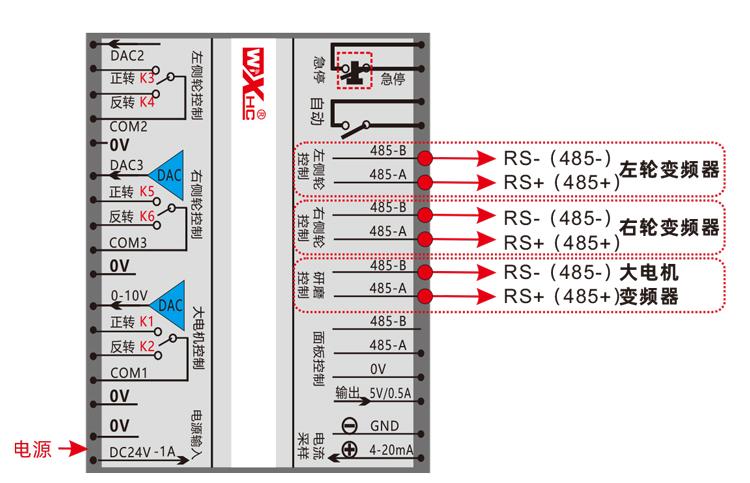
2.Referí na nos diagram di kabel di risibí,Kompará bo ekipo riba e sitio .,Konektá e aparato pa medio di waya i risibidónan .。
3.Despues cu e recibidor ta wordo drecha .,E antena ekipá ku e recibidor mester ta konektá .,E instala e punta pafó di e antena òf pone esaki pafó di e armario di koriente .,Ta recomendabel pa pone e señal riba e parti ariba di e armario electrico.,No ta permití pa deskonektá e antena .,Òf pone e antena paden di e armario di koriente .,Por pone ku e señal malu ta inutilizabel .。
4.Finalmente instala e bateria riba e kòntròl remoto .,Tapa di bateria ta streng,Despues sende e switch di koriente di kòntròl remoto .,E pantaya di kòntròl remoto lo mustra e interfase di trabou normal .,Bo por hasi operashon di kòntròl remoto .。
Resepior di tamaño di instalashon
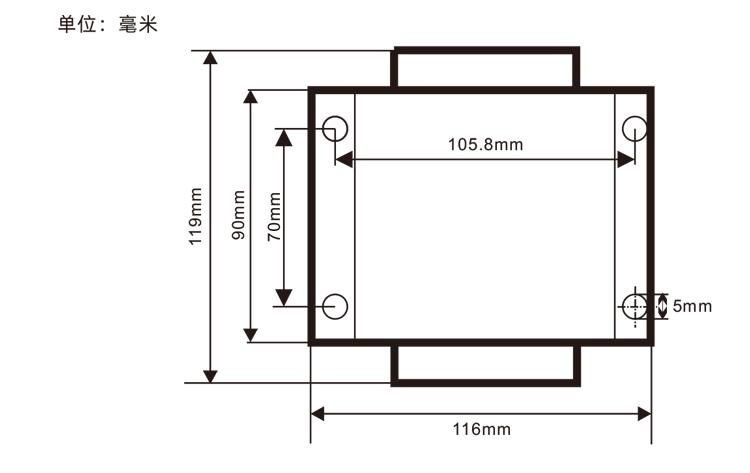
Diagram di Referensia di Kable

Konfigurashonnan di Parameter di Kontrol Remoto
Metodo pa introdusí e parameter di fondo di e kòntròl remoto .:E switch di modo ta bira den modo manual .,E velocidad di e motor chikito ta wordo ahusta na 25 ., Òf 0、10、20、40、50,E switch dilanti di e motor grandi ta bira ariba pa 3 biaha konsekutivo .,Bira pabao 3 biaha den fila .;
Uza e knob di "Reglamento di Velosidat di Motor Chikito" pa bira páginanan,Primi Habilitá i bira e knob di kòntròl di velosidat di motor chikitu pa modifiká e parameternan .; Despues di e modifikashon .,Bira e página te na final,Selektá Warda pa sali,Druk riba e boton di habilitá pa sali for di e menú .;
E parameternan ta lo siguiente .: Koriente máksimo:Rango grandi di balor di feedback di coriente motorico,E rango di fiha 15-200A .,Default 60;
Parameternan di ahuste di velosidat .:Modo outomátiko motor chikitu ta aselerá lihé i pokopoko,Mas chikito .,Rango di fiha 200-1500 ., Predeterminá 1000;
Parameternan di redukshon di velosidat:Pone e limite superior cu ta permiti cambio di velocidad di motor .,Ora e cambionan actual surpasa e balor aki .,Lo ta slow down。 Mas chikito e .,Mas lihe e motornan robes y drechi ta baha velocidad .,Rango 05-12,Default 06;
Kuminsá-blocking: Velosidat a1.:Mas grandi e velocidad di motor ta aumenta mas lihe .,Range 00-06.,Default 01;
Disminuí velosidat a2.:Mas grandi e velocidad di motor ta, mas lihe e lo baha .,Range 00-06.,Default 02;
Regulacion di velocidad habilitá:Ta necesario pa primi e velocidad di e motor chikito pa por habilitá esaki?,00No ta aktivá,01Aktivá,Default 01;
Si e switch dilanti i reverso di e motor grandi lo keda outomatikamente-locked despues ku e wòrdu lansá .,00No keda,01Mantené,Default 01;
E caminata mas grandi .:Velosidat máksimo di motor,Range 10-100,Default 50;
Cortamento actual .:Koriente máksimo di kòrtamentu,E pantaya ta mustra balor di IC .,Rango 15-160,Default 30,Screen ta mustra e IC korespondiente .:30。Limit superior di e parameter aki = máksimo di koriente x80% .;
Limite di velosidat predeterminá:Velosidat di kòrtamentu outomátiko chikitu di motor predeterminá,Range 00-100,Default 10,E pantaya ta mustra F1.0.,E parameter aki ta solamente exacto ora e canamento maximo ta wordo poni na 50 .。
Canal inalámtico .:Default 10,Ora e señal di kòntròl remoto ta instabil .,Òf ora tin interferensia di señal riba e sitio .,E parameter aki por wòrdu modifiká .,Switch canalnan,Evitá interferensia;
Ofisina di límite di velosidat:Limite di velosidat di kòrtamentu outomatiko mínimo pa motor chikí,Range 00-200,Default 60,E pantaya korespondiente ta mustra 6.0.;Mustra balor límite superior = límite di velosidat offset × 0.1.;
Ehérsito mas grandi:Velosidat máksimo grandi di motor,Range 10-100,Default 50;
Equiponan di Mbus (rekeri):Selekshon di modelo di konvertidó di frekuensha di motor grandi,Range 00-03.,Default 03;
00-Shanghai Xielin 01-Fuji
02-Yingweiteng 03-Huichuano (Zhongchen、Robincon)
Ekiponan di sbus (rekeri):Selekshon di modelo di konvertidó di frekuensha di motor chikí,Range 00-05,Default 03;
00-Shanghai Xielin 01-Fuji
02-Yingweiteng 03-Huichuano (Zhongchen、Robincon)
04-Yaskawa Tatsuya 05-No ainda
Konfigurashonnan di parameter di inverter
1.Selekshon di fuente di komando .:Kanal di komando di komunikashon
2.Selekshon di fuente di frekuensha prinsipal:Comunicacion Mirando
3.Tasa di baud:19200
4.Formato di dato:No tin verificacion .,Formato di dato<8-N-1.>
5.adres lokal:E convertidor di frecuencia robes ta wordo poni na 1 .,E convertidor di frecuencia corecto ta wordo poni na 2 .,E convertidor di frecuencia di motor grandi ta wordo poni na 3 .
Instrukshonnan di operashon di kòntròl remoto
1.E mashin ta alimenta .,Control remoto a bira riba .,Introdusí e fondo di kòntròl remoto .,Pone e parameternan di fondo di e kòntròl remoto .,Prinsipalmente, pone modelonan di inverter di motor chikitu i grandi (e fabricante di mashin a pone e paso aki pa salta e paso aki);
2.Pone e parameternan di inverter (skip e paso aki si e fabricante di mashin a pone esaki);
3.Kontrol remoto ta bira modo manual,Despues usa e kòntròl remoto pa move e mashin pa e posishon di trabou .;
4.Den modo manual,Pone e gran kòrtamentu di koriente di konfigurashon di balor IC .,Pone e velocidad di motor .;
5.Bira pa modo outomatiko,Set e balor F di e límite di velosidat di kòrtamentu di motor chikitu .;
6.Den modo outomatiko,Bira e switch di motor grandi pa dilanti y start e motor grandi .,Despues bira e switch di motor chikito pa engranahe dilanti of patras .,E kòntròl remoto ta introdusí e modo di kòrtamentu outomatiko .,Kuminsá kòrta。


1.Por fabor na temperatura di kamber i preshon .,Uza den ambientenan seco .,Extende bida di servicio。
2.Por fabor evita di muha den yobida .、Uza den ambientenan abnormal manera blaas .,Extende bida di servicio。
3.Por fabor tene e compartimento di bateria y e area di shrapnel di metal limpi .。
4.Por fabor evita di squeeze y cay, causando daño na e control remoto .。
5.No ta usa pa hopi tempo .,Por fabor kita e bateria .,E warda e kòntròl remoto i bateria na un lugá limpi i sigur .。
6.Pone atencion riba humedad-prueba y ta reproduci di choke durante almacenahe y transporte .。

1.Por fabor lesa e instrukshonnan pa usa den detaye promé ku usa .,Personal no-profeshonal ta prohibí。
2.Por fabor reemplasa e bateria na tempo ora e bateria ta mucho abou .,Evita erornan kousá pa insufisiente poder i kousa e kòntròl remoto no por operá。
3.Si ta rekeri reparacion .,Por fabor tuma kontakto ku e fabrikante,Si daño causa pa reparacion propio .,E fabricante lo no duna garantia .。
(Remarka:Upgrades òf upgrade di produkto,Por fabor tuma kontakto ku e bendedó pa optené e último informashon di produkto ora di kumpra produkto)




