
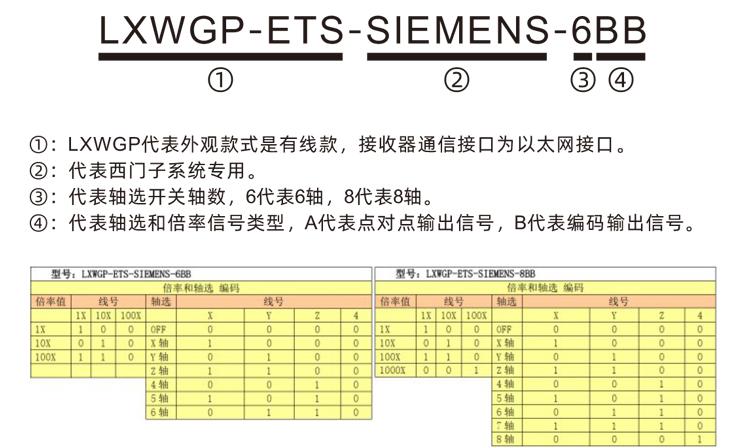
LXWGP-ETS-SIEMENS roată electronică cu fir
Descriere


Roata de mână electronică este utilizată pentru ghidarea manuală a mașinilor-unelte CNC、poziţie、Operațiune de grevă。Acest model de roată electronică este o roată electronică cu fir Siemens cu afișaj real.,Roata de mână este conectată la interfața X130 a sistemului Siemens printr-un cablu de rețea.,Citiți coordonatele sistemului și afișați-le pe afișajul LCD al roții de mână prin comunicarea protocolului S7.,Și selectarea axelor sistemului de control al roții de mână se poate face prin comunicare.、mărire、Buton și alte semnale。

1.Conectat folosind un cablu de mufă pentru aviație cu 6 fire,Lungime cablu roată 10 metri。
2.Ecranul roții de mână poate afișa coordonatele piesei de prelucrat ale sistemului、Coordonate mecanice、Viteza de avans、Selectarea axei、Informații precum mărirea。
3.Suportați butonul de oprire de urgență,Cantitate de comutare ieșire semnal IO,Oprirea de urgență a roții de mână este încă eficientă。
4.Suporta 6 butoane personalizate,Comutarea semnalului IO,Poate transmite semnale către sistem prin cablare IO sau comunicare。
5.Suporta controlul pe 6 sau 8 axe,Comutarea semnalului IO,Poate transmite semnale către sistem prin cablare IO sau comunicare。
6.Suportă 3 sau 4 niveluri de control al măririi,Comutarea semnalului IO,Poate transmite semnale către sistem prin cablare IO sau comunicare。
7.Suport codificator de impulsuri,100Puls/cerc,Semnalul poate fi transmis către sistem prin cabluri de impuls AB.。
8.Susțineți protocolul Siemens S7,Suport Siemens 828D、840DSL、ONE și alte sisteme model。

| Tensiunea de alimentare a roții de lucru | DC24V/1A |
| Tensiune de alimentare cu energie receptoare | DC24V/1A |
| Domeniul de sarcină de ieșire al receptorului IO |
DC24V
|
| Lungimea cablului la capătul roții de mână |
10m
|
| Lungimea cablului la capătul receptorului |
1m
|
| Lungimea cablului de rețea la capătul receptorului |
3m
|
| Temperatura de funcționare |
-25℃<X<55℃
|
| Înălțime anti-cădere |
1m
|
| Personalizați numărul de butoane | 6Indivual |
| Dimensiunea produsului | 233*90.7*77.4(mm) |


Comentarii:
① Butonul de oprire:
Apăsați butonul de oprire de urgență,Două grupuri de ieșiri IO de oprire de urgență pe receptor sunt deconectate,Și toate funcțiile roții de mână sunt invalide。
După eliberarea opririi de urgență,Oprirea de urgență IO -ul IO închis pe receptor,Toate funcțiile roții de mână sunt restaurate。
② ecran afișaj:
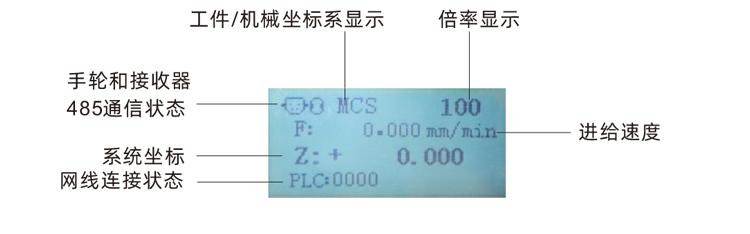
PLC:0000Înseamnă că cablul de rețea nu este conectat,PLC:1010Înseamnă că cablul de rețea și sistemul PLC sunt conectate cu succes.,
PLC:1110Indică faptul că roata de mână scrie cu succes datele sistemului.,PLC:0001Indică o conexiune reușită la computer。
③ Butoane Custom:
6Butoane personalizate,Fiecare buton corespunde unui punct de ieșire IO de pe receptor,De asemenea, conectat la sistem prin comunicare。
④AXIS SELECȚIE SELECȚIE:
Comutarea comutatorului de selecție a axei poate comuta axa de mișcare controlată de roata de mână。
⑤Buton Activare:
Apăsați și mențineți apăsat orice buton de activare pe ambele părți,Codificatorul de puls de balansare este eficient。 Iar cele două grupuri de pe receptor activează conducerea de ieșire IO,Eliberați butonul de activare,Activați deconectarea ieșirii IO。
⑥Comutator de mărire:
Comutați comutatorul de mărire pentru a comuta mărirea controlată de roata de mână。
⑦Coder de impulsuri:
Apăsați și mențineți apăsat butonul de activare,Scuturarea codificatorului de impulsuri,Trimite un semnal de impuls,Controlează mișcarea arborelui mașinii。
⑧Cablu roată de mână:
Cablu care conectează roata de mână și receptor,mufă de aviație,Pentru alimentare cu roată de mână și comunicare。



6.1Pași de instalare a produsului
1.Instalați receptorul în dulapul electric prin orificiile pentru șuruburi de la cele patru colțuri.。
2.Consultați diagrama de cablare a receptorului nostru,Comparați-vă echipamentul la fața locului,Conectați dispozitivul prin cablu și receptor
conectați,Utilizați un cablu de rețea pentru a conecta receptorul la interfața X130 a sistemului。
3.După fixarea receptorului,Instalați baza prizei aviației în deschiderea roții de mână de pe panou,O altă bază
Banda de borne este conectată la interfața cu roată de mână de pe receptor.。Apoi introduceți ștecherul de aviație al cablului de capăt al roții de mână în bază,Strânge
corpuri de fixare。
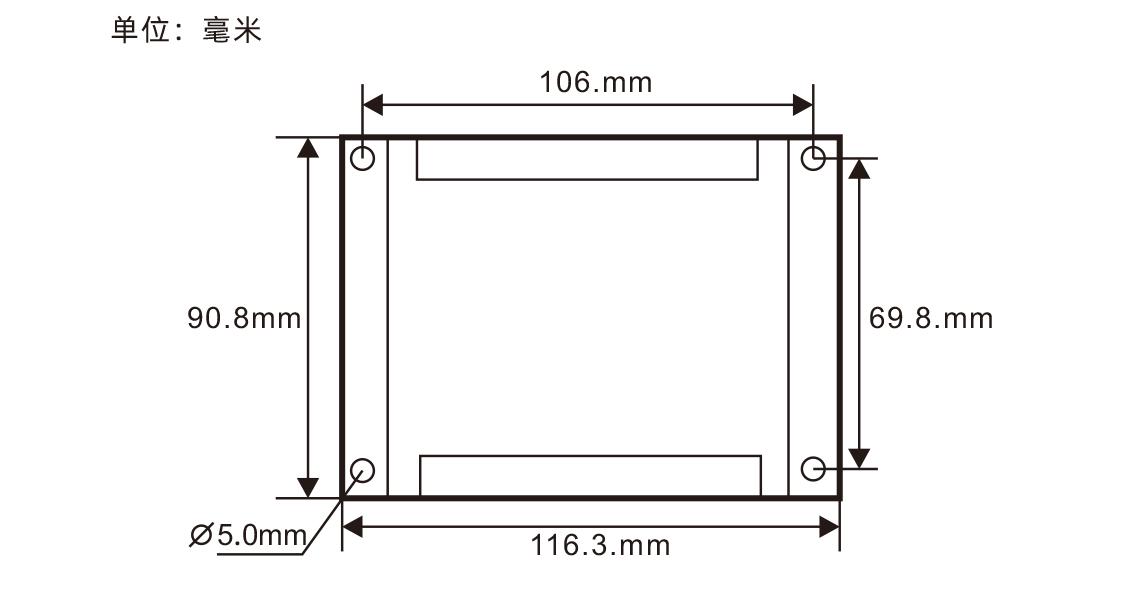
6.2Dimensiunea instalării receptorului
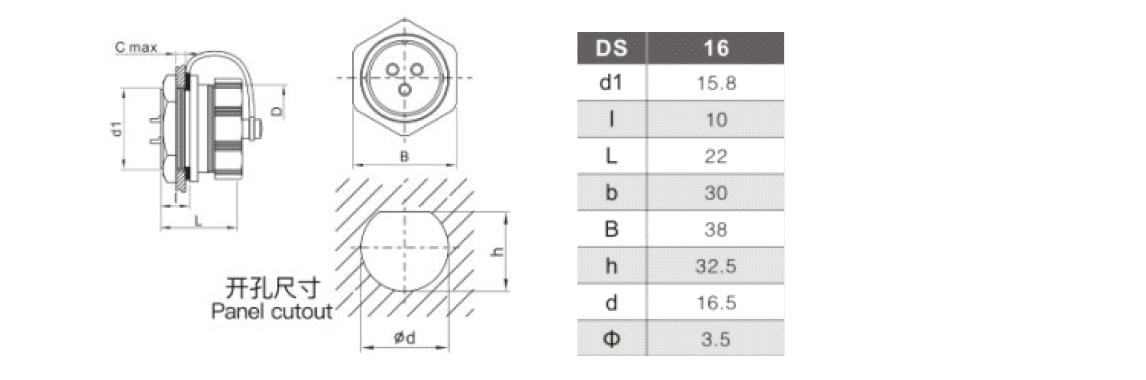
6.3Dimensiuni de instalare a prizei de aviație
6.4Diagrama de referință a cablului receptorului

6.2Dimensiunea instalării receptorului
6.3Dimensiuni de instalare a prizei de aviație
6.4Diagrama de referință a cablului receptorului

1.Receptorul este pornit,Lumina de funcționare a receptorului este aprinsă,Conectați receptorul la computer folosind un cablu de rețea,Setați o adresă IP fixă pentru computer,Utilizați software-ul instrumentului de configurare a rețelei pentru a seta parametrii de rețea pentru funcția roată de mână,Setări specifice
Pentru metodă, consultați „Instrucțiuni de utilizare a roții de mână cu fir LXWGP-ETS”。
2.După finalizarea configurării receptorului,Sistemul necesită programarea programului PLC,Pentru detalii, consultați „Metode de setare LXWGP-ETS pentru diferite sisteme CNC Siemens” și informații despre rutina programului PLC。
3.După finalizarea setărilor de mai sus,Luați receptorul la dulapul electric al mașinii și instalați-l,Deconectați cablul de rețea de la computer și conectați-l la interfața X130 a sistemului,Conectați cablurile de alimentare și de impuls ale receptorului。
4.Mașina este alimentată,Receptorul este pornit,Lumina de funcționare a receptorului este aprinsă,Porniți comutatorul de alimentare al roții de mână,Capac pentru ecranul roții de mână,PLC de afișare pe ecran:1010,Indică o comunicare reușită între roată de mână și sistem.。
5.Selectați selecția axei:Comutator de selecție a axei,Selectați axa pe care doriți să o operați。
6.Selectați multiplicatorul:Comutați întrerupătorul de mărire,Selectați multiplicatorul de care aveți nevoie。
7.Mutați axa:Apăsați și mențineți apăsat butonul de activare,Selectați axa și comutarea,Selectați comutatorul multiplicator,Apoi rotiți codificatorul pulsului,Rotiți axa de mișcare înainte în sensul acelor de ceasornic,Rotiți axa de mișcare negativă în sens invers acelor de ceasornic。
8.Apăsați și mențineți apăsat orice buton personalizat,Butonul corespunzător IO de ieșire a receptorului este pornit,Eliberați butonul închidere închidere。
9.Apăsați butonul de oprire de urgență,Receptorul deconectează ieșirea IO de oprire de urgență,Funcția roții de mână eșuează,Eliberați butonul de oprire de urgență,Oprirea de urgență IO a fost închisă,Recuperarea funcției roții de mână。


| Situația de vină | Cauză posibilă |
Metode de depanare
|
|
|
Metode de depanare
|
1.Dacă cablul de aviație dintre roată de mână și receptor este conectat corect și fiabil
2.Este suficientă tensiunea de alimentare a receptorului?
3.Eșecul roții de mână
|
1.Verificați legătura cablului de aviație între roată de mână și receptor
2.Verificați puterea de intrare a receptorului
3.Contactați producătorul pentru a reveni la fabrică pentru întreținere
|
|
| Niciun răspuns la acţionarea roţii de mână |
1.Sunt conectate cablurile de rețea dintre receptor și sistem?
2.Este bine scris programul PLC de sistem?
3.Configurația receptorului este setată corect?
4.Pictograma de comunicare 485 afișată pe afișajul roții a eșuat?
5.Când operați roata de mână,Trebuie să apăsați și să țineți apăsate butoanele de activare de pe ambele părți
6.Este eliberat butonul de oprire de urgență?
|
1.Verificați dacă receptorul și portul de rețea X130 al sistemului sunt conectate cu un cablu de rețea
2.Verificați și confirmați dacă PLC-ul sistemului este scris în conformitate cu materialele de referință pe care le-am furnizat.
3.Verificați dacă receptorul se referă la informațiile noastre și la software-ul instrumentului furnizat,Setați corect parametrii rețelei și adresa DB a receptorului etc.
4.Verificați între roată de mână și receptor
6priză de miez verde,Două dintre liniile de comunicare:485-A și 485-B,Este conectat corect și sigur?,Există vreo întrerupere a circuitului?
|
|
|
După ce receptorul este pornit,Lampa de lucru de pe receptor nu se aprinde
|
1.Anomalii alimentării cu energie electrică
2.Eroare de cablare de alimentare
3.Eșecul receptorului
|
1.Verificați dacă sursa de alimentare are tensiune,
Tensiunea îndeplinește cerințele
2.Verificați dacă poli pozitivi și negativi ai sursei de alimentare sunt conectați invers
3.Reveniți la întreținerea fabricii
|

1.Vă rugăm la temperatura și presiunea camerei,Utilizat în medii uscate,Extinde durata de viață。
2.Vă rugăm să evitați să vă udați în ploaie、Utilizat în medii anormale, cum ar fi blisterele,Extinde durata de viață。
3.Vă rugăm să păstrați roata de mână curată,Extinde durata de viață。
4.Vă rugăm să evitați stoarcerea、Cădere、Bumping etc.,Preveniți accesoriile de precizie în interiorul roții de mână de erori de deteriorare sau de precizie。
5.Nu este folosit de mult timp,Vă rugăm să păstrați roata de mână într -un loc curat și sigur。
6.Acordați atenție rezistenței la umiditate și rezistenței la șoc în timpul depozitării și transportului。

1.Vă rugăm să citiți instrucțiunile pentru utilizare în detaliu înainte de utilizare,Personalul non-profesional este interzis。
2.După ce apare orice situație anormală în roată de mână,Vă rugăm să încetați imediat să îl utilizați,și depanați,Înainte de depanare,Este interzisă folosirea din nou a volantului defect,Evitați accidentele de siguranță din cauza defecțiunilor necunoscute ale roții de mână;
3.Dacă este necesară reparația,Vă rugăm să contactați producătorul,Dacă daunele cauzate de auto-repară,Producătorul nu va oferi o garanție。



.png)
