
වයර් කියත් යන්ත්රය ස්වයංක්රීය කැපුම් රැහැන් රහිත දුරස්ථ පාලකය
කම්බි කියත් යන්ත්රයේ DH12S-P6S හි ස්වයංක්රීය කැපීමේ රැහැන් රහිත දුරස්ථ පාලනය
විස්තරය


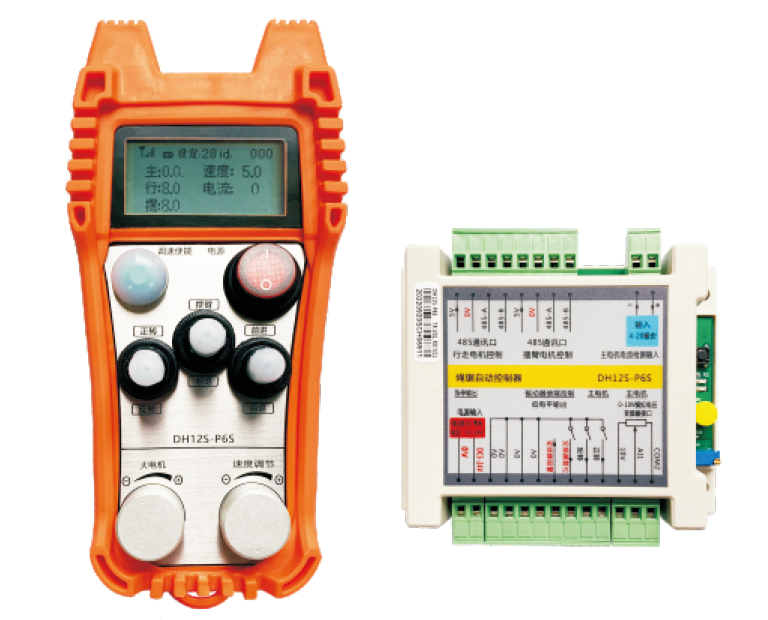
ආකෘතිය:DH12S-P6S ඇඩැප්ටර උපකරණ:වයර් කියත් / බ්ලේඩ් කියත් යන්ත්රය


ප්රකාශ කරන්න:ඇන්ටනා වර්ග තුනක් තෝරා ගත හැකිය,පෙරනිමි චූෂණ කුසලාන ඇන්ටෙනාව ප්රමිතියෙන් සන්නද්ධ වේ


ප්රධාන මෝටර් වේගය:සත්කාරක:0-50
ගමන් මෝටර් වේගය:හරි:0-50
ස්වයංක්රීය කැපුම් ගමන් මෝටරය උපරිම වේග සීමාව:වේගය:0-30(පරාමිතීන් වෙනස් කළ හැකිය)
ස්වයංක්රීය කැපුම් ප්රධාන මෝටර් සැකසුම් ධාරාව:සැලසුම:28(පරාමිතීන් වෙනස් කළ හැකිය)
Swing arm මෝටර් වේගය:දැම්මා:0-50

අඩු පීඩනය:දුරස්ථ පාලකයේ බැටරිය ඉතා අඩුය,කරුණාකර බැටරිය ආදේශ කරන්න

අන්තර්ජාලයෙන් වැටෙන්න:රැහැන් රහිත සං signal ා බාධා කිරීම,කරුණාකර ග්රාහක බල සැපයුම පරීක්ෂා කරන්න,නැවත බලය,දුරස්ථ පාලනය නැවත ආරම්භ කරන්න

1、දුරස්ථ පාලකය සක්රිය කර ඇත
ලබන්නා ක්රියාත්මක වේ,ග්රාහකයේ D2 බල ආලෝකය සැමවිටම ක්රියාත්මක වේ,D1 සංඥා ආලෝකය දැල්වීමට පටන් ගනී;දුරස්ථ පාලකයේ අංක 5 බැටරි දෙකක් සවි කර ඇත,බල ස්විචය සක්රිය කරන්න,දර්ශන මෝටර් වේගය පෙන්වන්න,එයින් අදහස් වන්නේ ආරම්භය සාර්ථක බවයි。
2、ප්රධාන මෝටර් සහ වේග නියාමනය
"වේග පාලනය සබල කරන්න" ඔබාගෙන සිටින්න,"ඉදිරියට / ප්රතිලෝම" ස්විචය ඉදිරියට ගෙන යන්න,ග්රාහකයේ ප්රධාන මෝටරය ඉදිරියට භ්රමණය වී ක්රියාත්මක වේ;
"වේග පාලනය සබල කරන්න" ඔබාගෙන සිටින්න,"ඉදිරියට / ප්රතිලෝම" ස්විචය ඉදිරියට ගෙන යන්න,ග්රාහකයේ ප්රධාන මෝටරය ඉදිරියට භ්රමණය වී ක්රියාත්මක වේ;
"වේග පාලනය සබල කරන්න" ඔබාගෙන සිටින්න,ආපසු හැරවීම සඳහා "ඉදිරි / ප්රතිලෝම" ස්විචය හරවන්න,ග්රාහක ප්රධාන මෝටරය ආපසු හරවා ක්රියාත්මක වේ;
සරලව ස්විචය මැදට හෝ ආපසු හරවන්න,ප්රධාන මෝටරය වහාම නතර වේ,සක්රිය කිරීමට වේග පාලනය ඔබන්න අවශ්ය නොවේ;
"Big Motor" බොත්තම හරවන්න,ග්රාහක ප්රධාන මෝටර් ඉන්වර්ටර් වේග නියාමනය වෝල්ටීයතාවය 0-10V සකස් කළ හැක;
3、ගමන් මෝටරය
3、ගමන් මෝටරය
"වේග පාලනය සබල කරන්න" ඔබාගෙන සිටින්න,"ඉදිරියට / ප්රතිලෝම" ස්විචය ඉදිරියට හෝ පසුපසට ගෙන යන්න,ඇවිදින මෝටරය 50 ක අධික වේගයකින් ගමන් කරනු ඇත;
4、Swing arm මෝටර් සහ වේග නියාමනය
"Swing Arm/Reverse" ස්විචය swing arm හෝ reverse වෙත හරවන්න,ග්රාහකයාගේ පැද්දීමේ අත් මෝටරය ආරම්භ වේ;ඉන්පසු "වේග ගැලපුම්" බොත්තම හරවන්න,Swing arm මෝටර් වේගය සකස් කළ හැක;
"වේග පාලනය සබල කරන්න" ඔබාගෙන සිටින්න,ඉන්පසු "swing arm/reverse" ස්විචය පෙරළන්න,පැද්දෙන ආම් මෝටරය 50 ක අධික වේගයකින් ගමන් කරනු ඇත;
5、ගමන් මෝටර් වේග සීමාව ගැලපීම
"Speed Enable" බොත්තම ඔබා අල්ලාගෙන සිටින්න,ස්වයංක්රීය කැපීමේදී ගමන් කරන මෝටරයේ උපරිම වේග සීමාව සකස් කිරීමට "වේග ගැලපුම" හරවන්න.;
6、ස්වයංක්රීය කැපීම
පළමු පියවර,ප්රධාන මෝටරය ආරම්භ කරන්න;පියවර 2,ගමන් කරන මෝටරයේ උපරිම වේග සීමාව සකසන්න;පියවර 3,ඉදිරියට හෝ පසුපසට යාමට "ඉදිරි/ආපසු" ස්විචය හරවන්න,ස්වයංක්රීය කැපුම් මාදිලිය ඇතුළු කරන්න;
7、පරාමිති සැකසුම් (පරිශීලකයින්ට ඒවා පුද්ගලිකව වෙනස් කිරීම තහනම් වේ)
පරාමිති මෙනුව ඇතුළත් කරන්න:අතින් මාදිලියේ,ප්රධාන මෝටර් වේගය 0 වන විට,ඉදිරියට / ප්රතිලෝම ස්විචය පේළියක 3 වතාවක් නැමී ඇත,ඉන්පසු එය 1 වතාවක් බිඳ දමන්න,පරාමිති මෙනුව ඇතුළත් කරන්න;
පරාමිති මෙනුවෙන් පිටවන්න:වේග ගැලපුම් බොත්තම් පිටුව හැරවීම,සුරැකීමට හෝ නොකිරීමට තෝරන්න,Enable බොත්තම එබීමෙන් තහවුරු කරන්න;
ශ්රේණිගත ධාරාව:ප්රධාන මෝටර් ධාරාවේ උපරිම අගය,ඇම්පියර් ඒකකය;
වේග නියාමන පරාමිතීන්:ස්වයංක්රීය කැපීමේ පාලන පරාමිතීන්,පෙරනිමි 800,මිලි තත්පර ඒකකය,වෙනස් කිරීම තහනම්ය;
Desetශ පරාමිතීන්:කපන ලද වත්මන් වෙනස් කිරීමේ වටිනාකම මෙම අගය ඉක්මවා යන විට,වේගයෙන් පිරිහීමට පටන් ගන්න,ඇම්පියර් ඒකකය;
ත්වරණය A1:කපන ධාරාව කට්ටල කැපීමේ ධාරාවට වඩා අඩු වූ විට,ඇවිදින මෝටරයේ එක් එක් ත්වරණයෙන් වේග අගය වැඩි විය;
Desuerde A2: කැපීමේ ධාරාව කට්ටල කැපීමේ ධාරාවට වඩා වැඩි වූ විට,ඇවිදින මෝටරයේ එක් එක් වේගය අඩු වීමෙන් වේග අගය අඩු වේ;
Swing arm ධාරාව:පෙරනිමි අගය,වෙනස් කිරීම තහනම්ය;
නැවතුම් කාලය:ස්වයංක්රීය මාදිලියේ වත්මන් අධි බර හේතුවෙන් වසා දැමීමෙන් පසු,කාලයකට පසු නැවත ධාරාව පරීක්ෂා කරන්න,එය නියමිත ධාරාවට වඩා අඩු නම්,ඇවිදීමේ මෝටරය ස්වයංක්රීයව ආරම්භ කරන්න;දෙවන ඒකකය,පෙරනිමි අගය,වෙනස් කිරීම තහනම්ය;
නැවතුම් කාලය:ස්වයංක්රීය මාදිලියේ වත්මන් අධි බර හේතුවෙන් වසා දැමීමෙන් පසු,කාලයකට පසු නැවත ධාරාව පරීක්ෂා කරන්න,එය නියමිත ධාරාවට වඩා අඩු නම්,ඇවිදීමේ මෝටරය ස්වයංක්රීයව ආරම්භ කරන්න;දෙවන ඒකකය,පෙරනිමි අගය,වෙනස් කිරීම තහනම්ය;
උපරිම ධාරාව:ප්රධාන මෝටර් ප්රතිපෝෂණ වත්මන් පරාසය,ඇම්පියර් ඒකකය;
උපරිම ධාරක:දුරස්ථ පාලක ප්රධාන මෝටර් වේග සංදර්ශක පරාසය;
උපරිම ඇවිදීම:වලංගු නොවන පරාමිතිය;
වේග සීමාව ඕෆ්සෙට්:ස්වයංක්රීයව කැපීමේදී,දුරස්ථ පාලක සංදර්ශකය ඇවිදීමේ මෝටර් වේග සීමාව = මෙම පරාමිතියෙන් 50%;
සංවේදීතාව එක් කරන්න:ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාව වැඩි වන විට,සෑම අවස්ථාවකදීම මෙම අගය ඉක්මවා අගය වැඩි වේ,ගමන් මෝටර් ත්වරණය;
සංවේදීතාව අඩු කරන්න:ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාව අඩු වන විට,සෑම අවස්ථාවකදීම මෙම අගයට වඩා අගය අඩු වේ,සංචාරක මෝටර් රථ වේගය අඩුවීම;
සංවේදිතා හිලව් කිරීම:ප්ලස් සහ ඍණ සංවේදීතා පරාමිතීන් සඳහා ඕෆ්සෙට් වර්ධකය;
ධාරාව සකසන්න:ස්වයංක්රීය කැපීම,ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාවේ සීමාව,මෙම අගය ඉක්මවා,ඇවිදින මෝටරය මන්දගාමී වීමට පටන් ගනී;මෙම අගයට පහළින්,ඇවිදින මෝටරය වේගවත් වීමට පටන් ගනී;ඇම්පියර් ඒකකය;
ධාරාව සකසන්න:ස්වයංක්රීය කැපීම,ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාවේ සීමාව,මෙම අගය ඉක්මවා,ඇවිදින මෝටරය මන්දගාමී වීමට පටන් ගනී;මෙම අගයට පහළින්,ඇවිදින මෝටරය වේගවත් වීමට පටන් ගනී;ඇම්පියර් ඒකකය;
හිස් පිටවීම:ස්වයංක්රීය ප්රකාරය ආරම්භ වන විට,ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාව මෙම අගයට වඩා අඩු නම්,idling mode එකේ ඇත,මෙම අගයට වඩා වැඩිය,පසුව idling mode එකෙන් පිටවන්න,කැපුම් මාදිලිය ඇතුල් කරන්න,ඇම්පියර් ඒකකය;
No-load ධාරාව:ස්වයංක්රීය ප්රකාරය ආරම්භ වන විට,ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාව මෙම අගයට වඩා අඩු නම්,පැටවුම් රහිත මාදිලියේ ඇත,මෙම අගයට වඩා වැඩිය,පසුව no-load මාදිලියෙන් පිටවන්න,කැපුම් මාදිලිය ඇතුල් කරන්න,ඇම්පියර් ඒකකය;
අතේ වේගය පැද්දෙන්න:Swing arm මෝටර් ආරම්භක වේගය;
කැපුම් මාදිලිය:බ්ලේඩ් කියත් සහ වයර් කියත් මාදිලි අතර මාරු වන්න,මාරු වීමෙන් පසුව, පරාමිතීන් ද ඒ අනුව මාරු වනු ඇත.;බ්ලේඩ් කියත් මාදිලියේ,දුරස්ථ පාලක සංදර්ශකයට ස්විං ආම් මෝටරයක් එකතු කර ඇත,වයර් කියත් මාදිලියේ පැද්දෙන අත් මෝටරයක් නොමැත.;
ඉවත් කිරීමේ කාලය:ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාව නැවතුම් ධාරාව ඉක්මවා යන විට,ප්රතිපෝෂණ ධාරාව අඛණ්ඩව හඳුනා ගනී,debounce time යනු මෙම අඛණ්ඩ හඳුනාගැනීමේ කාලසීමාවයි.,මෙම කාලය ඉක්මවා,ප්රධාන මෝටර් ධාරාව තවමත් නැවතුම් ධාරාව ඉක්මවා යන බව හඳුනා ගන්න,ඇවිදින්නමෝටරය නතර වනු ඇත;එසේ නොමැති නම්, ඇවිදීමේ මෝටරය ඉදිරියට ගමන් කරනු ඇත;
ධාරාව නතර කරන්න:ප්රධාන මෝටර් ප්රතිපෝෂණ ධාරාව මෙම අගය ඉක්මවා යයි,ගමන් මෝටරය නතර වනු ඇත;ඇම්පියර් ඒකකය;
ඕෆ්සෙට් පෙරනිමිය:දුරස්ථ පාලකය සක්රිය කර ඇති විට ඇවිදින මෝටර් වේග සීමාවෙහි ආරම්භක අගය = මෙම අගයෙන් 50%;
![]()
| ලබන්නා මෙහෙයුම් බල සැපයුම |
DC24V / 1A (ස්වාධීන බල සැපයුම)
|
| ලබන්නාගේ ප්රතිදාන ලක්ෂ්යය බර පැටවීම | AC0-250V/3A DC0-30V/5A |
| ග්රාහකය වේගවත් නියාමනය නිමැවුම් වෝල්ටීයතාවය | Dc0-10v |

මෙම නිෂ්පාදනයේ අර්ථ නිරූපනයේ අවසාන අයිතිය Chengdu Core Synthetic Technology Co., Ltd සතු වේ.。





