
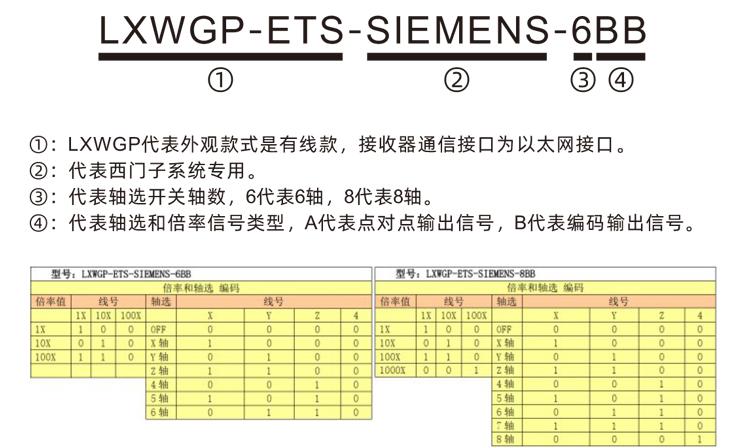
พวงมาลัยอิเล็กทรอนิกส์แบบมีสาย LXWGP-ETS-SIEMENS
คำอธิบาย


วงล้อหมุนอิเล็กทรอนิกส์ใช้สำหรับการแนะนำเครื่องมือกล CNC แบบแมนนวล、ตำแหน่ง、การดำเนินการนัดหยุดงาน。วงล้อหมุนอิเล็กทรอนิกส์รุ่นนี้เป็นวงล้อหมุนอิเล็กทรอนิกส์แบบมีสายของ Siemens พร้อมจอแสดงผลจริง,Handwheel เชื่อมต่อกับอินเทอร์เฟซ X130 ของระบบ Siemens ผ่านสายเคเบิลเครือข่าย,อ่านพิกัดของระบบและแสดงบนจอ LCD ของวงล้อจักรผ่านการสื่อสารโปรโตคอล S7,และสามารถเลือกแกนของระบบควบคุมล้อหมุนได้ผ่านการสื่อสาร、กำลังขยาย、ปุ่มและสัญญาณอื่นๆ。

1.เชื่อมต่อโดยใช้สายเคเบิลปลั๊กการบิน 6 คอร์,สาย Handwheel ยาว 10 เมตร。
2.หน้าจอวงล้อจักรสามารถแสดงพิกัดชิ้นงานของระบบได้、พิกัดเครื่องกล、ความเร็วในการป้อน、การเลือกแกน、ข้อมูลเช่นการขยาย。
3.รองรับปุ่มหยุดฉุกเฉิน,การสลับเอาต์พุตสัญญาณ IO ปริมาณ,การหยุดฉุกเฉินการปิดระบบพวงมาลัยยังคงมีผลอยู่。
4.รองรับปุ่มแบบกำหนดเอง 6 ปุ่ม,การสลับสัญญาณ IO,สามารถส่งสัญญาณออกไปยังระบบผ่านทางสายไฟหรือการสื่อสาร IO。
5.รองรับการควบคุม 6 หรือ 8 แกน,การสลับสัญญาณ IO,สามารถส่งสัญญาณออกไปยังระบบผ่านทางสายไฟหรือการสื่อสาร IO。
6.รองรับการควบคุมการขยาย 3 หรือ 4 ระดับ,การสลับสัญญาณ IO,สามารถส่งสัญญาณออกไปยังระบบผ่านทางสายไฟหรือการสื่อสาร IO。
7.รองรับ Pulse Encoder,100ชีพจร/วงกลม,สัญญาณสามารถส่งออกไปยังระบบผ่านการเดินสายพัลส์ AB。
8.สนับสนุนโปรโตคอลซีเมนส์ S7,รองรับซีเมนส์ 828D、840ดีเอสแอล、ONE และระบบรุ่นอื่นๆ。

| แรงดันไฟฟ้าของแหล่งจ่ายไฟทำงานแบบ Handwheel | กระแสตรง24V/1A |
| แรงดันไฟฟ้าของเครื่องรับ | กระแสตรง24V/1A |
| ช่วงโหลดเอาท์พุท IO ของตัวรับ |
ดีซี24วี
|
| ความยาวสายเคเบิลปลายแฮนด์วีล |
10ม
|
| ความยาวสายเคเบิลปลายตัวรับสัญญาณ |
1ม
|
| ความยาวสายเคเบิลเครือข่ายปลายตัวรับ |
3ม
|
| อุณหภูมิการทำงาน |
-25℃<x<55℃
|
| ความสูงต่อต้านฤดูใบไม้ร่วง |
1ม
|
| ปรับแต่งจำนวนปุ่ม | 6เกี่ยวกับการแบ่งแยก |
| ขนาดสินค้า | 233*90.7*77.4(มม.) |


ความเห็น:
1. ปุ่มหยุดฉุกเฉิน:
กดปุ่มหยุดฉุกเฉิน,สองกลุ่มของการหยุดฉุกเฉินเอาต์พุต IO บนตัวรับสัญญาณจะถูกตัดการเชื่อมต่อ,และฟังก์ชั่นทั้งหมดของ handwheel นั้นไม่ถูกต้อง。
หลังจากปล่อยจุดหยุดฉุกเฉินแล้ว,หยุดฉุกเฉินเอาต์พุต IO ปิดบนตัวรับสัญญาณ,ฟังก์ชั่นทั้งหมดของ handwheel ได้รับการฟื้นฟู。
2. การแสดงผลหน้าจอ:
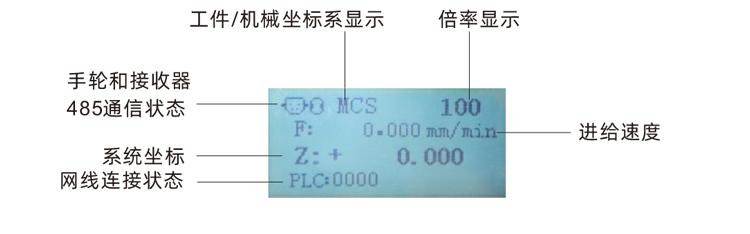
บมจ:0000หมายความว่าไม่ได้เชื่อมต่อสายเคเบิลเครือข่าย,บมจ:1010หมายความว่าเชื่อมต่อสายเคเบิลเครือข่ายและระบบ PLC เรียบร้อยแล้ว,
บมจ:1110บ่งชี้ว่าวงล้อจักรเขียนข้อมูลระบบสำเร็จ,บมจ:0001บ่งชี้การเชื่อมต่อกับคอมพิวเตอร์สำเร็จ。
3. ปุ่มกำหนดเอง:
6ปุ่มที่กำหนดเอง,แต่ละปุ่มสอดคล้องกับจุดเอาต์พุต IO บนตัวรับสัญญาณ,อีกทั้งยังเชื่อมต่อกับระบบผ่านการสื่อสาร。
④สวิตช์เลือกแกน:
การสลับสวิตช์การเลือกแกนสามารถสลับแกนเคลื่อนที่ที่ควบคุมโดย handwheel。
⑤ปุ่มเปิดใช้งาน:
กดปุ่มเปิดใช้งานทั้งสองด้านค้างไว้,จะได้ผลโดยการเขย่าตัวเข้ารหัสพัลส์เท่านั้น。 และเอาต์พุต IO ที่เปิดใช้งาน 2 ชุดบนเครื่องรับก็เปิดอยู่,ปล่อยปุ่มเปิดใช้งาน,เปิดใช้งานการตัดการเชื่อมต่อเอาต์พุตของ IO。
⑥สวิตช์ขยาย:
การสลับสวิตช์การขยายสามารถเปลี่ยนการขยายที่ควบคุมโดยวงล้อเลื่อนได้。
⑦ตัวเข้ารหัสพัลส์:
กดปุ่มเปิดใช้งานค้างไว้,เขย่าตัวเข้ารหัสพัลส์,ส่งสัญญาณชีพจร,ควบคุมการเคลื่อนไหวของเพลาเครื่องจักร。
⑧สายล้อมือ:
สายเคเบิลเชื่อมต่อวงล้อมือและตัวรับสัญญาณ,ปลั๊กการบิน,สำหรับ พาวเวอร์ซัพพลาย และการสื่อสารแบบล้อหมุน。



6.1ขั้นตอนการติดตั้งผลิตภัณฑ์
1.ติดตั้งตัวรับสัญญาณในตู้ไฟฟ้าผ่านรูสกรูที่มุมทั้งสี่。
2.อ้างถึงไดอะแกรมการเดินสายตัวรับสัญญาณของเรา,เปรียบเทียบอุปกรณ์ในสถานที่ของคุณ,เชื่อมต่ออุปกรณ์ผ่านสายเคเบิลและตัวรับสัญญาณ
เชื่อมต่อ,ใช้สายเคเบิลเครือข่ายเพื่อเชื่อมต่อเครื่องรับเข้ากับอินเทอร์เฟซ X130 ของระบบ。
3.หลังจากที่ผู้รับได้รับการแก้ไขแล้ว,ติดตั้งฐานปลั๊กการบินในช่องเปิดของวงล้อจักรบนแผง,อีกฐานหนึ่ง
แถบขั้วต่อเสียบเข้ากับอินเทอร์เฟซแบบล้อมือบนเครื่องรับ。จากนั้นเสียบปลั๊กการบินของสายปลายพวงมาลัยเข้ากับฐาน,ขัน
ติดตั้ง。
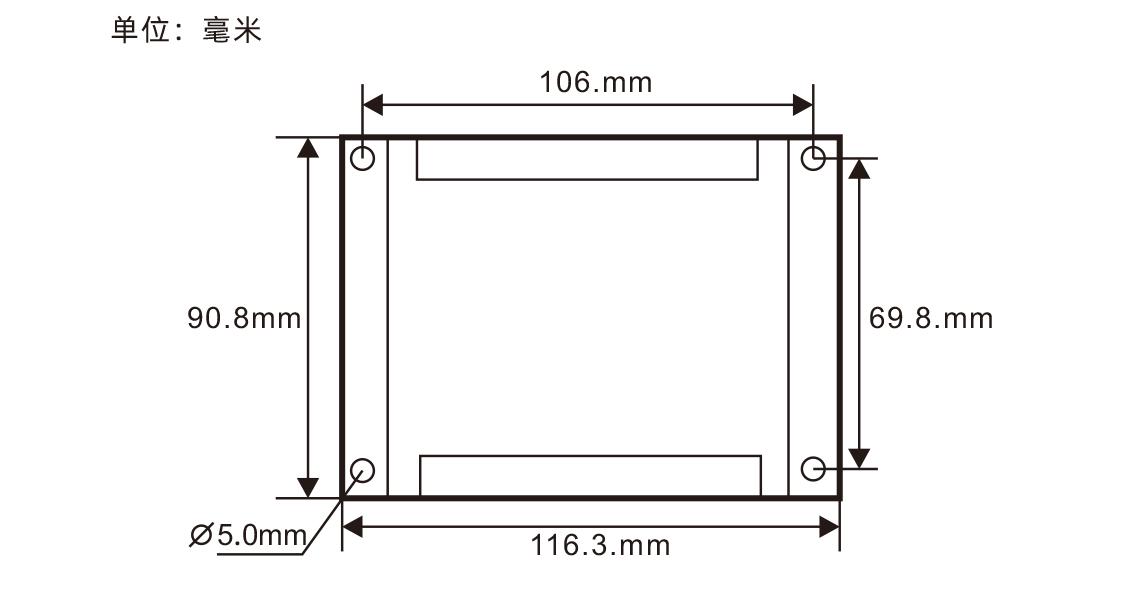
6.2ขนาดการติดตั้งตัวรับสัญญาณ
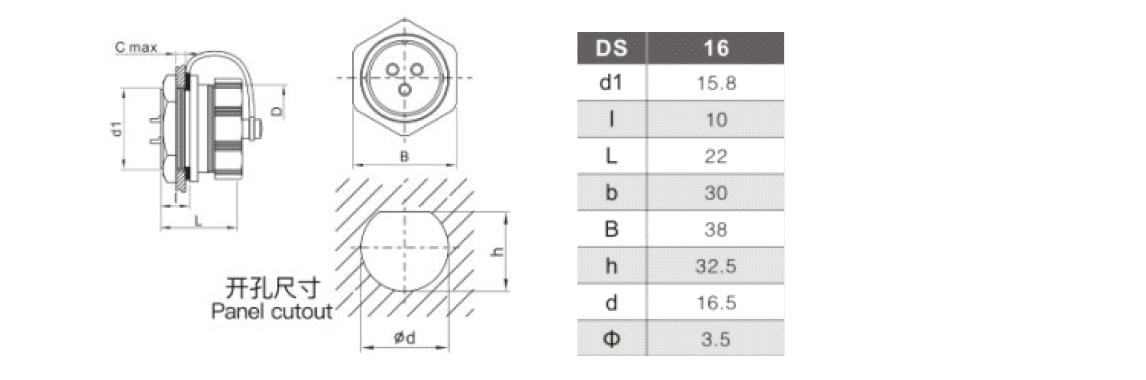
6.3ขนาดการติดตั้งปลั๊กการบิน
6.4ไดอะแกรมอ้างอิงการเดินสายตัวรับสัญญาณ

6.2ขนาดการติดตั้งตัวรับสัญญาณ
6.3ขนาดการติดตั้งปลั๊กการบิน
6.4ไดอะแกรมอ้างอิงการเดินสายตัวรับสัญญาณ

1.เครื่องรับเปิดใช้งาน,ไฟปฏิบัติการของตัวรับสัญญาณเปิดอยู่,เชื่อมต่อเครื่องรับเข้ากับคอมพิวเตอร์โดยใช้สายเคเบิลเครือข่าย,ตั้งค่าที่อยู่ IP คงที่สำหรับคอมพิวเตอร์ของคุณ,ใช้ซอฟต์แวร์เครื่องมือกำหนดค่าเครือข่ายเพื่อตั้งค่าพารามิเตอร์เครือข่ายสำหรับฟังก์ชันวงล้อจักร,การตั้งค่าเฉพาะ
สำหรับวิธีการ โปรดดูที่ "คำแนะนำสำหรับการใช้งานพวงมาลัยบังคับแบบมีสาย LXWGP-ETS"。
2.หลังจากตั้งค่าตัวรับเรียบร้อยแล้ว,ระบบต้องมีการเขียนโปรแกรมโปรแกรม PLC,สำหรับรายละเอียด โปรดดูที่ "วิธีการตั้งค่า LXWGP-ETS สำหรับระบบ CNC ของ Siemens ที่แตกต่างกัน" และข้อมูลรูทีนของโปรแกรม PLC。
3.หลังจากการตั้งค่าข้างต้นเสร็จสิ้น,นำตัวรับสัญญาณไปที่ตู้ไฟฟ้าของเครื่องแล้วติดตั้ง,ถอดสายเคเบิลเครือข่ายออกจากคอมพิวเตอร์และเสียบเข้ากับอินเทอร์เฟซ X130 ของระบบ,เสียบปลั๊กไฟตัวรับและสายพัลส์。
4.เครื่องถูกขับเคลื่อน,เครื่องรับเปิดใช้งาน,ไฟปฏิบัติการของตัวรับสัญญาณเปิดอยู่,เปิดสวิตช์ไฟที่พวงมาลัย,บูตหน้าจอ Handwheel,บมจ.แสดงผลหน้าจอ:1010,บ่งชี้ถึงการสื่อสารที่สำเร็จระหว่างวงล้อจักรและระบบ。
5.เลือกการเลือกแกน:สวิตช์สวิตช์สวิตช์การเลือกเพลา,เลือกแกนที่คุณต้องการใช้งาน。
6.เลือกตัวคูณ:สลับสวิตช์ขยาย,เลือกตัวคูณที่คุณต้องการ。
7.เลื่อนแกน:กดปุ่มเปิดใช้งานค้างไว้,เลือกแกนและสวิตช์,เลือกสวิตช์ตัวคูณ,จากนั้นหมุนตัวเข้ารหัสพัลส์,หมุนแกนการเคลื่อนไหวไปข้างหน้าตามเข็มนาฬิกา,หมุนแกนการเคลื่อนไหวเชิงลบทวนเข็มนาฬิกา。
8.กดปุ่มที่กำหนดเองใด ๆ,ปุ่มเอาต์พุต IO ที่สอดคล้องกันของตัวรับสัญญาณจะเปิดอยู่,ปิดปุ่มปล่อยปิด。
9.กดปุ่มหยุดฉุกเฉิน,ผู้รับจะตัดการเชื่อมต่อการหยุดฉุกเฉิน IO เอาท์พุท,ฟังก์ชั่น Handwheel ล้มเหลว,ปล่อยปุ่มหยุดฉุกเฉิน,ปิดการหยุดฉุกเฉิน IO เอาต์พุต,การกู้คืนฟังก์ชั่น Handwheel。


| สถานการณ์ความผิดพลาด | สาเหตุที่เป็นไปได้ |
วิธีการแก้ไขปัญหา
|
|
|
วิธีการแก้ไขปัญหา
|
1.ไม่ว่าสายเคเบิลการบินระหว่างวงล้อจักรกับตัวรับจะเชื่อมต่ออย่างถูกต้องและเชื่อถือได้หรือไม่
2.แรงดันไฟของเครื่องรับเพียงพอหรือไม่?
3.ความล้มเหลวของล้อ
|
1.ตรวจสอบการเชื่อมต่อสายเคเบิลการบินระหว่างวงล้อจักรกับตัวรับ
2.ตรวจสอบกำลังไฟฟ้าเข้าของตัวรับสัญญาณ
3.ติดต่อผู้ผลิตเพื่อกลับไปที่โรงงานเพื่อการบำรุงรักษา
|
|
| ไม่มีการตอบสนองเมื่อใช้งานวงล้อจักร |
1.มีการเชื่อมต่อสายเคเบิลเครือข่ายระหว่างเครื่องรับและระบบหรือไม่
2.โปรแกรม PLC ของระบบเขียนได้ดีหรือไม่?
3.การกำหนดค่าเครื่องรับตั้งค่าถูกต้องหรือไม่?
4.ไอคอนการสื่อสาร 485 ที่แสดงบนหน้าจอวงล้อจักรล้มเหลวหรือไม่?
5.เมื่อใช้งาน Handwheel,คุณต้องกดปุ่มเปิดใช้งานทั้งสองด้านค้างไว้
6.ปุ่มหยุดฉุกเฉินถูกปล่อยออกมาหรือไม่?
|
1.ตรวจสอบว่าตัวรับสัญญาณและพอร์ตเครือข่าย X130 ของระบบเชื่อมต่อด้วยสายเคเบิลเครือข่ายหรือไม่
2.ตรวจสอบและยืนยันว่าระบบ PLC เขียนตามเอกสารอ้างอิงที่เราให้ไว้หรือไม่
3.ตรวจสอบว่าผู้รับอ้างอิงถึงข้อมูลของเราและซอฟต์แวร์เครื่องมือที่ให้มาหรือไม่,ตั้งค่าพารามิเตอร์เครือข่ายและที่อยู่ DB ของเครื่องรับ ฯลฯ อย่างถูกต้อง
4.ตรวจสอบระหว่างวงล้อจักรและตัวรับ
6ซ็อกเก็ตสีเขียวหลัก,สายสื่อสารสองสาย:485-เอ และ 485-B,เชื่อมต่ออย่างถูกต้องและปลอดภัยหรือไม่?,มีการลัดวงจรหรือไม่?
|
|
|
หลังจากเครื่องรับเปิดใช้งาน,ไฟแสดงการทำงานบนเครื่องรับไม่สว่างขึ้น
|
1.ความผิดปกติของแหล่งจ่ายไฟ
2.ข้อผิดพลาดในการเดินสายไฟ
3.ผู้รับความล้มเหลว
|
1.ตรวจสอบว่าแหล่งจ่ายไฟมีแรงดันไฟฟ้าหรือไม่,
แรงดันไฟฟ้าตรงตามข้อกำหนดหรือไม่
2.ตรวจสอบว่าเสาบวกและลบของแหล่งจ่ายไฟเชื่อมต่อในสิ่งที่ตรงกันข้าม
3.กลับไปที่การบำรุงรักษาโรงงาน
|

1.กรุณาที่อุณหภูมิห้องและความดัน,ใช้ในสภาพแวดล้อมที่แห้ง,ยืดอายุการใช้งาน。
2.โปรดหลีกเลี่ยงการเปียกท่ามกลางสายฝน、ใช้ในสภาพแวดล้อมที่ผิดปกติเช่นแผลพุพอง,ยืดอายุการใช้งาน。
3.โปรดรักษาความสะอาดของ handwheel,ยืดอายุการใช้งาน。
4.โปรดหลีกเลี่ยงการบีบ、ตก、กระแทก ฯลฯ,ป้องกันอุปกรณ์เสริมที่แม่นยำภายในล้อจากข้อผิดพลาดความเสียหายหรือข้อผิดพลาดที่ถูกต้อง。
5.ไม่ได้ใช้เป็นเวลานาน,กรุณาเก็บ handwheel ในสถานที่ที่สะอาดและปลอดภัย。
6.ให้ความสนใจกับการป้องกันความชื้นและกันกระแทกระหว่างการจัดเก็บและการขนส่ง。

1.โปรดอ่านคำแนะนำสำหรับใช้ในรายละเอียดก่อนใช้งาน,ห้ามมิให้มีบุคลากรที่ไม่ใช่มืออาชีพ。
2.หลังจากเกิดสถานการณ์ผิดปกติใดๆ ในวงล้อจักร,กรุณาหยุดใช้ทันที,และแก้ไขปัญหา,ก่อนที่จะแก้ไขปัญหา,ห้ามมิให้ใช้วงล้อจักรที่ชำรุดอีกครั้ง,หลีกเลี่ยงอุบัติเหตุด้านความปลอดภัยเนื่องจากความล้มเหลวของพวงมาลัยที่ไม่ทราบสาเหตุ;
3.หากต้องการการซ่อมแซม,กรุณาติดต่อผู้ผลิต,หากความเสียหายที่เกิดจากการซ่อมแซมตนเอง,ผู้ผลิตจะไม่ให้การรับประกัน。
.png)

-500x650.png)

-500x650.png)
