
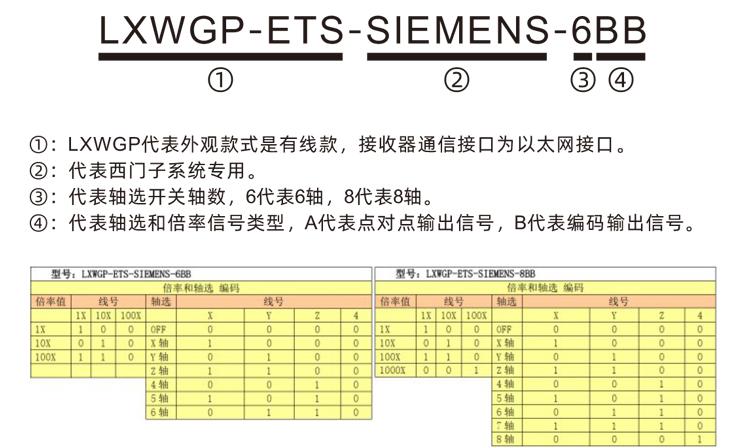
LXWGP-ETS-SIEMENS juhtmega elektrooniline käsiratas
Kirjeldus


CNC-tööpinkide käsitsi juhtimiseks kasutatakse elektroonilist käsiratast、positsioon、Streigioperatsioon。See elektroonilise käsiratta mudel on tõelise ekraaniga Siemensi juhtmega elektrooniline käsiratas.,Käsiratas on võrgukaabli kaudu ühendatud Siemensi süsteemi X130 liidesega.,Lugege süsteemi koordinaate ja kuvage need S7 protokolli kaudu käsiratta LCD-ekraanile.,Ja käsiratta juhtimissüsteemi telje valiku saab teha suhtluse kaudu.、suurendus、Nupp ja muud signaalid。

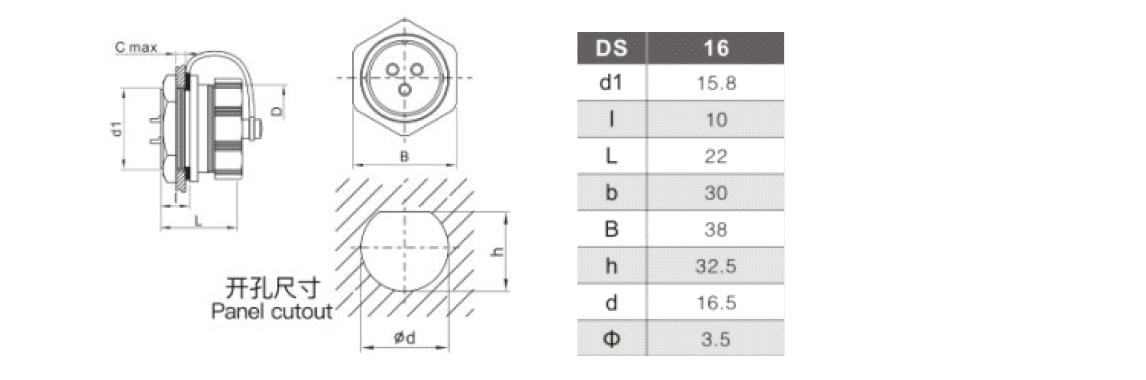
1.Ühendatud 6-soonelise lennunduspistikuga,Käsiratta trossi pikkus 10 meetrit。
2.Käsiratta ekraan võib kuvada süsteemi tooriku koordinaate、Mehaanilised koordinaadid、Söötmise kiirus、Telje valik、Teave, näiteks suurendus。
3.Toetage hädaolukorra peatumisnuppu,IO signaali väljundi vahetamine,Käsiratta väljalülitamise hädaseiskamine on endiselt efektiivne。
4.Toetab 6 kohandatud nuppu,IO signaali vahetamine,Saab väljastada signaale süsteemi IO juhtmestiku või side kaudu。
5.Toetab 6 või 8 telje juhtimist,IO signaali vahetamine,Saab väljastada signaale süsteemi IO juhtmestiku või side kaudu。
6.Toetage 3 või 4 suurendustaseme juhtimist,IO signaali vahetamine,Saab väljastada signaale süsteemi IO juhtmestiku või side kaudu。
7.Toetage impulsi kooderit,100Pulss/ring,Signaali saab süsteemi väljastada AB impulssjuhtmestiku kaudu.。
8.Toetage Siemens S7 protokolli,Toetage Siemens 828D、840DSL、ONE ja muud mudelisüsteemid。

| Käsiratta tööpinge toiteallikas | DC24V/1A |
| Vastuvõtja toitepinge | DC24V/1A |
| Vastuvõtja IO väljundkoormuse vahemik |
DC24V
|
| Käsiratta otsa kaabli pikkus |
10m
|
| Vastuvõtja otsa kaabli pikkus |
1m
|
| Vastuvõtja otsa võrgukaabli pikkus |
3m
|
| Töötemperatuur |
-25℃<X<55℃
|
| Kulmavastane kõrgus |
1m
|
| Kohandage nuppude arvu | 6individuaalne |
| Toote suurus | 233*90.7*77.4(mm) |


Kommentaarid:
①Mersolutsiooni peatumisnupp:
Vajutage hädaabipeatuse nuppu,Kaks gruppi hädaolukorra peatumise IO väljundeid vastuvõtjal on lahti ühendatud,Ja kõik käeratta funktsioonid on valed。
Pärast hädaolukorra peatuse vabastamist,Hädaolukorra peatus IO väljund suletud vastuvõtjale,Kõik käeratta funktsioonid on taastatud。
② ekraani ekraan:
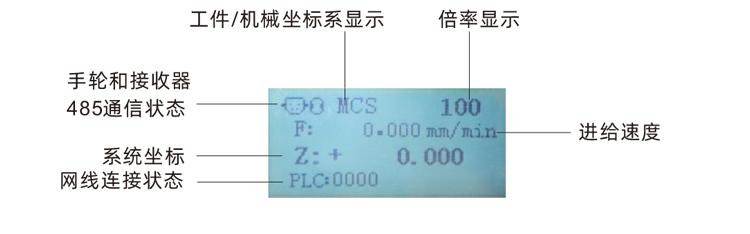
PLC:0000See tähendab, et võrgukaabel pole ühendatud,PLC:1010See tähendab, et võrgukaabel ja PLC-süsteem on edukalt ühendatud.,
PLC:1110Näitab, et käsiratas kirjutab süsteemiandmeid edukalt.,PLC:0001Näitab edukat ühendamist arvutiga。
③Custom nupp:
6Kohandatud nupud,Iga nupp vastab vastuvõtja IO väljundpunktile,Süsteemiga ühendatud ka side kaudu。
④Axis valikulüliti:
Telje valiku lüliti vahetamine võib vahetada käeratta juhitavat liikuvat telge。
⑤Luba nupp:
Vajutage ja hoidke mõlemal küljel kumbagi nuppu Luba,See on efektiivne ainult impulssikooderi raputamisega。 Ja kaks vastuvõtja rühma võimaldavad IO väljundi juhtivust,Vabastage nupp Luba,Luba IO väljundi lahtiühendamine。
⑥Suurenduslüliti:
Lülitage suurenduslüliti, et lülitada käeratta juhitav suurendus。
⑦ Impulsskooder:
Vajutage ja hoidke nuppu Luba,Raputav impulssikoder,Saada impulsisignaal,Kontrollige masinavõlli liikumist。
⑧ Käsiratta kaabel:
Juhtratast ja vastuvõtjat ühendav kaabel,lennunduspistik,Käsiratta toiteallikaks ja sidepidamiseks。



6.1Toote paigaldamise sammud
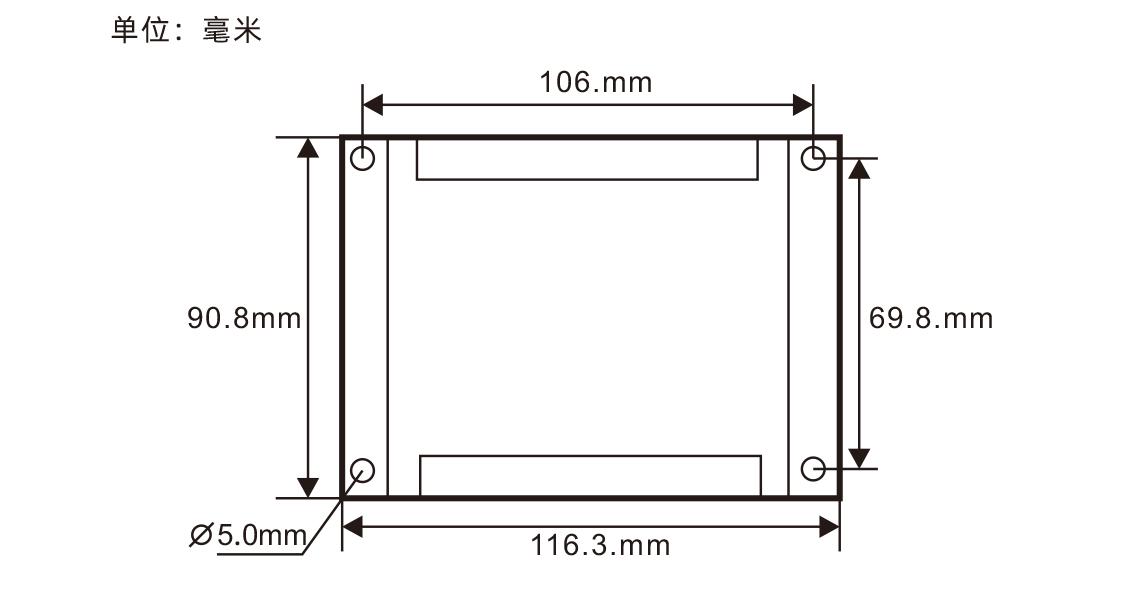
1.Paigaldage vastuvõtja neljas nurgas olevate kruviaukude kaudu elektrikilpi.。
2.Vaadake meie vastuvõtja juhtmestiku skeemi,Võrdle oma kohapealseid seadmeid,Ühendage seade kaabli ja vastuvõtja kaudu
ühendada,Kasutage võrgukaablit, et ühendada vastuvõtja süsteemi X130 liidesega。
3.Pärast vastuvõtja fikseerimist,Paigaldage lennukipistiku alus paneeli käsiratta avasse,Teine alus
Klemmliist ühendatakse vastuvõtja käsiratta liidesega.。Seejärel sisestage käsiratta otsakaabli õhupistik alusesse,Pingutage
inventar。
6.2Vastuvõtja installi suurus
6.3Lennuki pistiku paigaldusmõõtmed
6.4Vastuvõtja juhtmestiku võrdlusskeem

6.2Vastuvõtja installi suurus
6.3Lennuki pistiku paigaldusmõõtmed
6.4Vastuvõtja juhtmestiku võrdlusskeem

1.Vastuvõtja on sisse lülitatud,Vastuvõtja töövalgus on sisse lülitatud,Ühendage vastuvõtja võrgukaabli abil arvutiga,Määrake oma arvutile fikseeritud IP-aadress,Kasutage käsiratta funktsiooni võrguparameetrite määramiseks võrgu konfiguratsioonitööriista tarkvara,Konkreetsed seaded
Selle meetodi kohta vaadake jaotist "Juhised juhtmega käsiratta LXWGP-ETS kasutamiseks"。
2.Pärast vastuvõtja seadistamise lõpetamist,Süsteem nõuab PLC programmi programmeerimist,Üksikasju leiate jaotisest "LXWGP-ETS seadistusmeetodid erinevatele Siemensi CNC-süsteemidele" ja PLC programmi rutiini teavet。
3.Pärast ülaltoodud seadistuste lõpetamist,Viige vastuvõtja masina elektrikilpi ja paigaldage see,Ühendage võrgukaabel arvuti küljest lahti ja ühendage see süsteemi X130 liidesega,Ühendage vastuvõtja toite- ja impulssjuhtmed。
4.Masin on toide,Vastuvõtja on sisse lülitatud,Vastuvõtja töövalgus on sisse lülitatud,Lülitage käsiratta toitelüliti sisse,Käsiratta ekraani alglaadimine,Ekraanil kuvatav PLC:1010,Näitab edukat sidet käsiratta ja süsteemi vahel.。
5.Valige telje valik:Lüliti telje valimislüliti,Valige telg, mida soovite kasutada。
6.Valige kordaja:Lülitage suurenduslüliti,Valige vajalik kordaja。
7.Liigutage telge:Vajutage ja hoidke nuppu Luba,Valige telg ja lüliti,Valige korrutuslüliti,Seejärel keerake impulsskooderit,Pöörake päripäeva edasiliikumise telg,Keerake negatiivse liikumise telg vastupäeva。
8.Vajutage ja hoidke kohandatud nuppu,Vastuvõtja vastav nupp IO väljund on sisse lülitatud,Väljalaskenupu väljund Sulgege。
9.Vajutage hädaabipeatuse nuppu,Vastuvõtja ühendab hädaolukorra peatuse IO väljundi,Käsiratta funktsioon ebaõnnestub,Vabastage hädaabi peatumisnupp,Hädaolukorra peatus IO väljund suletud,Käsiratta funktsiooni taastamine。


| Rikkeolukord | Võimalik põhjus |
Tõrkeotsingu meetodid
|
|
|
Tõrkeotsingu meetodid
|
1.Kas käsiratta ja vastuvõtja vaheline lennukaabel on õigesti ja usaldusväärselt ühendatud
2.Kas vastuvõtja toitepinge on piisav?
3.Käeratas rike
|
1.Kontrollige lennukaabli ühendust käsiratta ja vastuvõtja vahel
2.Kontrollige vastuvõtja sisendvõimsust
3.Hoolduseks tehase juurde naasmiseks pöörduge tootja poole
|
|
| Käsirattaga töötades ei reageerita |
1.Kas vastuvõtja ja süsteemi vahelised võrgukaablid on ühendatud?
2.Kas süsteemi PLC programm on hästi kirjutatud?
3.Kas vastuvõtja konfiguratsioon on õigesti seadistatud?
4.Kas käsiratta ekraanil kuvatav sideikoon 485 ebaõnnestus?
5.Käeratta juhtimisel,Peate vajutama ja hoidma mõlemal küljel olevaid lubamisnuppe
6.Kas hädaseiskamisnupp on vabastatud?
|
1.Kontrollige, kas vastuvõtja ja süsteemi X130 võrguport on võrgukaabliga ühendatud
2.Kontrollige ja kinnitage, kas süsteemi PLC on kirjutatud meie esitatud võrdlusmaterjalide järgi.
3.Kontrollige, kas vastuvõtja viitab meie teabele ja pakutavale tööriistatarkvarale,Seadistage õigesti vastuvõtja võrguparameetrid ja DB aadress jne.
4.Kontrollige käsiratta ja vastuvõtja vahel
6südamik roheline pistikupesa,Kaks sideliini:485-A ja 485-B,Kas see on õigesti ja kindlalt ühendatud?,Kas on mingi vooluringi katkestus?
|
|
|
Pärast seda, kui vastuvõtja on sisse lülitatud,Vastuvõtja töötuli ei sütti
|
1.Toiteallikate kõrvalekalded
2.Toitejuhtmete viga
3.Vastuvõtja rike
|
1.Kontrollige, kas toiteallikal on pinge,
Kas pinge vastab nõuetele
2.Kontrollige, kas toiteallika positiivsed ja negatiivsed poolused on ühendatud vastupidiselt
3.Naaske tehase hooldusse
|

1.Palun toatemperatuuril ja rõhul,Kasutatakse kuivas keskkonnas,Pikendada kasutusaja。
2.Palun vältige vihma käes märja saamist、Kasutatakse ebanormaalsetes keskkondades, näiteks villid,Pikendada kasutusaja。
3.Palun hoidke käeratta puhtana,Pikendada kasutusaja。
4.Palun vältige pigistamist、Langema、Põrutamine jne.,Vältige käeratta täppis tarvikuid kahjustuste või täpsuse vigu。
5.Ei kasutata pikka aega,Hoidke käeratta puhta ja turvalises kohas。
6.Pöörake ladustamise ja transpordi ajal tähelepanu niiskusekindlale ja löögikindlusele。

1.Enne kasutamist lugege üksikasjalikult kasutatavaid juhiseid,Mitteprofessionaalsed töötajad on keelatud。
2.Pärast mis tahes ebatavalise olukorra ilmnemist käsirattas,Lõpetage kohe selle kasutamine,ja tõrkeotsing,Enne tõrkeotsingut,Defektse käsiratta uuesti kasutamine on keelatud,Vältige teadmata käsiratta riketest tingitud õnnetusi;
3.Kui remonti on vajalik,Palun pöörduge tootja poole,Kui enesepaari põhjustatud kahju,Tootja ei anna garantii。




.png)
