
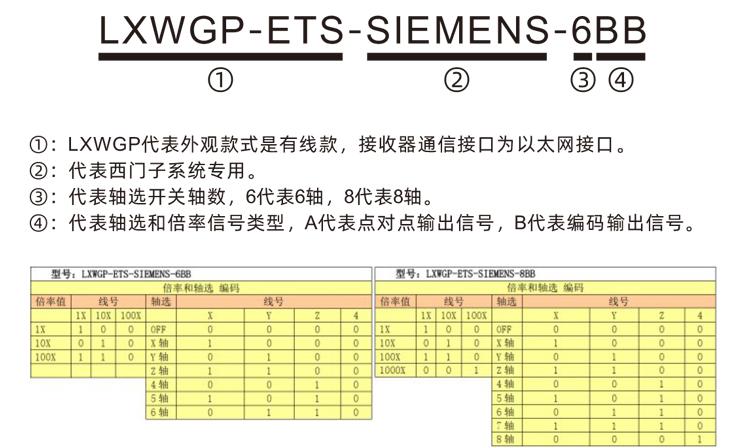
LXWGP-ETS-SIEMENS լարային էլեկտրոնային ձեռքի անիվ
Նկարագրություն


Էլեկտրոնային ձեռքի անիվը օգտագործվում է CNC հաստոցների ձեռքով ուղղորդելու համար、դիրք、Գործադուլի գործողություն。Էլեկտրոնային ձեռքի անիվի այս մոդելը Siemens-ի լարային էլեկտրոնային ձեռքի անիվ է իրական էկրանով:,Ձեռքի անիվը ցանցային մալուխի միջոցով միացված է Siemens համակարգի X130 ինտերֆեյսին։,Կարդացեք համակարգի կոորդինատները և ցուցադրեք դրանք ձեռքի անիվի LCD էկրանին S7 արձանագրային հաղորդակցության միջոցով:,Իսկ ձեռքի անիվի կառավարման համակարգի առանցքի ընտրությունը կարող է կատարվել հաղորդակցության միջոցով:、խոշորացում、Կոճակ և այլ ազդանշաններ。

1.Միացված է 6 միջուկանի ավիացիոն վարդակից մալուխի միջոցով,Ձեռքի անիվի մալուխի երկարությունը 10 մետր。
2.Ձեռքի անիվի էկրանը կարող է ցուցադրել համակարգի աշխատանքային մասի կոորդինատները、Մեխանիկական կոորդինատներ、Սնուցման արագություն、Առանցքի ընտրություն、Տեղեկություններ, ինչպիսիք են խոշորացումը。
3.Աջակցեք շտապ օգնության կոճակը,IO ազդանշանի ելքի անջատելը,Ձեռքի անիվի անջատման վթարային կանգառը դեռևս գործում է。
4.Աջակցում է 6 հատուկ կոճակ,IO ազդանշանի անջատելը,Կարող է ազդանշաններ ուղարկել համակարգ IO լարերի կամ կապի միջոցով。
5.Աջակցում է 6 կամ 8 առանցքների կառավարմանը,IO ազդանշանի անջատելը,Կարող է ազդանշաններ ուղարկել համակարգ IO լարերի կամ կապի միջոցով。
6.Աջակցեք խոշորացման հսկողության 3 կամ 4 մակարդակներին,IO ազդանշանի անջատելը,Կարող է ազդանշաններ ուղարկել համակարգ IO լարերի կամ կապի միջոցով。
7.Աջակցեք զարկերակային կոդավորողին,100Pulse / Circle,Ազդանշանը կարող է մուտք գործել համակարգ AB իմպուլսային լարերի միջոցով:。
8.Աջակցեք Siemens S7 արձանագրությանը,Աջակցություն Siemens 828D-ին、840DSL、ONE և այլ մոդելային համակարգեր。

| Ձեռքի անիվի աշխատանքային սնուցման լարումը | DC24V/1A |
| Ստացող էլեկտրամատակարարման լարումը | DC24V/1A |
| Ընդունիչի IO ելքային բեռնվածության տիրույթ |
DC24V
|
| Ձեռքի անիվի վերջի մալուխի երկարությունը |
10մ
|
| Ընդունիչի վերջի մալուխի երկարությունը |
1մ
|
| Ընդունիչի վերջի ցանցի մալուխի երկարությունը |
3մ
|
| Գործառնական ջերմաստիճանը |
-25℃<X<55℃
|
| Հակատարիքային բարձրություն |
1մ
|
| Անհատականացրեք կոճակների քանակը | 6երկկողմանի |
| Ապրանքի չափը | 233*90.7*77.4(Մմ) |


Մեկնաբանություններ:
①emergence Stop կոճակը:
Սեղմեք շտապ օգնության կոճակը,Ստացողի վրա արտակարգ իրավիճակների դադարեցման երկու խումբ անջատված է,Եւ ձեռքի բոլոր գործառույթները անվավեր են。
Արտակարգ իրավիճակների դադարեցվելուց հետո,Արտակարգ կանգառի IO ելքը փակվել է ստացողի վրա,Վերականգնվում են ձեռքի բոլոր գործառույթները。
②Screen էկրան:
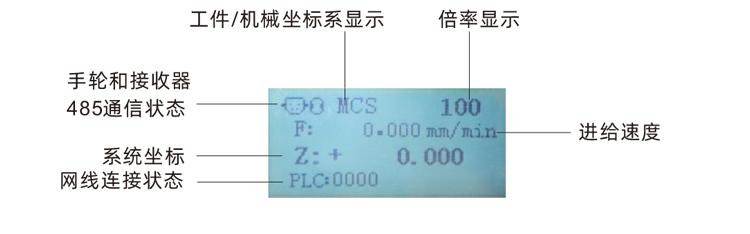
PLC:0000Դա նշանակում է, որ ցանցի մալուխը միացված չէ,PLC:1010Դա նշանակում է, որ ցանցային մալուխը և PLC համակարգը հաջողությամբ միացված են:,
PLC:1110Ցույց է տալիս, որ ձեռքի անիվը հաջողությամբ գրում է համակարգի տվյալները:,PLC:0001Ցույց է տալիս համակարգչի հետ հաջող միացում。
③Custom կոճակը:
6Պատվերով կոճակներ,Յուրաքանչյուր կոճակ համապատասխանում է ստացողի IO ելքային կետին,Համակարգին միացված է նաև կապի միջոցով。
④axis ընտրության անջատիչ:
Առանցքի ընտրության անջատիչը միացնելը կարող է անցնել շարժվող առանցքը, որը վերահսկվում է ձեռքի շարժիչով。
⑤Միացնել կոճակը:
Սեղմեք եւ պահեք կամ միացրեք կոճակը երկու կողմերից,Այն արդյունավետ է միայն զարկերակային կոդավորիչը թափահարելով。 Իսկ ստացողի վրա միացված IO արտադրանքի 2 հավաքածուները միացված են,Ազատեք միացնել կոճակը,Միացնել IO ելքային անջատումը。
⑥Խոշորացման անջատիչ:
Խոշորացման անջատիչը միացնելու միջոցով կարող է միացնել ձեռքի ղեկի կողմից վերահսկվող խոշորացումը:。
⑦ Զարկերակային կոդավորիչ:
Սեղմեք եւ պահեք միացնել կոճակը,Ցնցող զարկերակային կոդավորող,Ուղարկեք զարկերակային ազդանշան,Վերահսկեք մեքենայի լիսեռի շարժումը。
⑧Ձեռքի անիվի մալուխ:
Ձեռքի անիվը և ընդունիչը միացնող մալուխ,ավիացիոն խրոցակ,Ձեռքի անիվի սնուցման և կապի համար。



6.1Ապրանքի տեղադրման քայլեր
1.Ստացողը տեղադրեք էլեկտրական պահարանում չորս անկյուններում գտնվող պտուտակային անցքերով:。
2.Տես մեր ստացողի էլեկտրագծերի դիագրամը,Համեմատեք ձեր տեղում սարքավորումները,Սարքը միացրեք մալուխի և ընդունիչի միջոցով
միացնել,Օգտագործեք ցանցային մալուխ՝ ընդունիչը համակարգի X130 ինտերֆեյսին միացնելու համար。
3.Ստացողի ֆիքսելուց հետո,Տեղադրեք ավիացիոն խրոցակի հիմքը վահանակի վրա գտնվող ձեռքի անիվի բացվածքի մեջ,Մեկ այլ հիմք
Տերմինալային ժապավենը միացված է ստացողի ձեռքի անիվի միջերեսին:。Այնուհետև տեղադրեք ձեռքի անիվի ծայրային մալուխի ավիացիոն խցանը հիմքի մեջ,Խստացնել
հարմարանքներ。
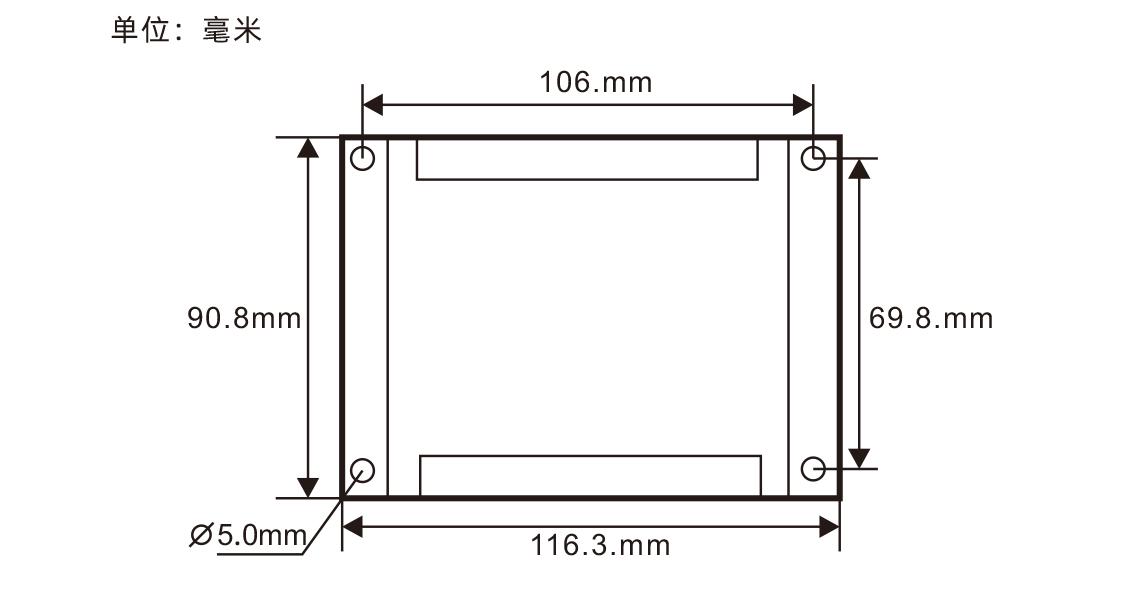
6.2Ստացողի տեղադրման չափը
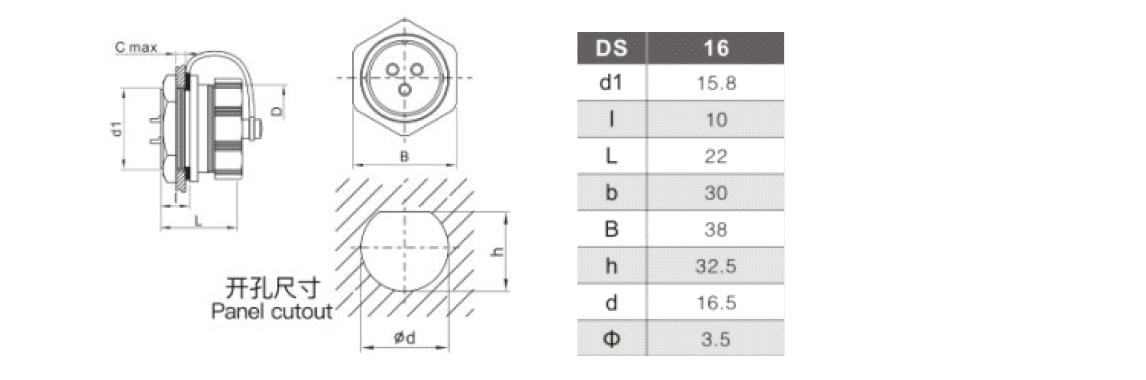
6.3Ավիացիոն խրոցակի տեղադրման չափերը
6.4Ստացողի էլեկտրագծերի հղման դիագրամ

6.2Ստացողի տեղադրման չափը
6.3Ավիացիոն խրոցակի տեղադրման չափերը
6.4Ստացողի էլեկտրագծերի հղման դիագրամ

1.Ստացողը սնուցվում է,Ստացողի գործառնական լույսը միացված է,Միացրեք ընդունիչը համակարգչին ցանցային մալուխի միջոցով,Սահմանեք ֆիքսված IP հասցե ձեր համակարգչի համար,Օգտագործեք ցանցի կազմաձևման գործիքի ծրագրակազմը՝ ձեռքի անիվի գործառույթի համար ցանցի պարամետրերը սահմանելու համար,Հատուկ պարամետրեր
Մեթոդի համար տե՛ս «LXWGP-ETS լարային ձեռքի անիվի օգտագործման հրահանգները»。
2.Ստացողի կարգավորումն ավարտվելուց հետո,Համակարգը պահանջում է ծրագրավորման PLC ծրագիր,Մանրամասների համար տե՛ս «LXWGP-ETS Կարգավորման մեթոդներ տարբեր Siemens CNC համակարգերի համար» և PLC ծրագրի ընթացիկ տեղեկատվությունը։。
3.Վերոնշյալ պարամետրերն ավարտելուց հետո,Ստացողը տարեք մեքենայի էլեկտրական պահարան և տեղադրեք այն,Անջատեք ցանցային մալուխը համակարգչից և միացրեք այն համակարգի X130 միջերեսին,Միացրեք ընդունիչի հոսանքի և զարկերակային լարերը。
4.Մեքենան սնուցվում է,Ստացողը սնուցվում է,Ստացողի գործառնական լույսը միացված է,Միացրեք ձեռքի անիվի հոսանքի անջատիչը,Ձեռքի անիվի էկրանի բեռնախցիկ,Էկրանի ցուցադրման PLC:1010,Ցույց է տալիս ձեռքի անիվի և համակարգի հաջող հաղորդակցությունը:。
5.Ընտրեք առանցքի ընտրություն:Փոխեք առանցքի ընտրության անջատիչը,Ընտրեք այն առանցքը, որը ցանկանում եք գործել。
6.Ընտրեք բազմապատկիչը:Անջատեք խոշորացման անջատիչը,Ընտրեք ձեզ անհրաժեշտ բազմապատկիչը。
7.Տեղափոխեք առանցքը:Սեղմեք եւ պահեք միացնել կոճակը,Ընտրեք առանցքը եւ անջատիչը,Ընտրեք բազմապատկիչ անջատիչը,Դրանից հետո միացրեք զարկերակային կոդավորիչը,Անջատեք սլաքի ուղղությամբ առաջ շարժման առանցքը,Անջատեք բացասական շարժման առանցքը հակառակ ուղղությամբ。
8.Սեղմեք եւ պահեք ցանկացած սովորական կոճակ,Ստացողի համապատասխան կոճակը միացված է,Թողարկման կոճակի ելքը փակեք。
9.Սեղմեք շտապ օգնության կոճակը,Ստացողը անջատվում է վթարային դադարեցման io ելքը,Handwheel գործառույթը ձախողվում է,Ազատեք շտապ օգնության կոճակը,Արտակարգ կանգառի IO ելքը փակ է,Handwheel գործառույթի վերականգնում。


| Մեղքերի իրավիճակ | Հնարավոր պատճառ |
Անսարքությունների լուծման մեթոդներ
|
|
|
Անսարքությունների լուծման մեթոդներ
|
1.Արդյո՞ք ձեռքի անիվի և ընդունիչի միջև ավիացիոն մալուխը միացված է ճիշտ և հուսալի
2.Արդյո՞ք ստացողի հզորության լարումը բավարար է:
3.Ձեռնարկելի ձախողում
|
1.Ստուգեք ավիացիոն մալուխի միացումը ձեռքի անիվի և ընդունիչի միջև
2.Ստուգեք ընդունիչի մուտքային հզորությունը
3.Կապվեք արտադրողի հետ `սպասարկման գործարան վերադառնալու համար
|
|
| Ձեռքի անիվը աշխատելիս ոչ մի արձագանք |
1.Միացված են արդյոք ստացողի և համակարգի միջև ցանցային մալուխները:
2.Համակարգի PLC ծրագիրը լա՞վ է գրված:
3.Ստացողի կոնֆիգուրացիան ճի՞շտ է դրված:
4.Արդյո՞ք 485 կապի պատկերակը, որը ցուցադրվում է ձեռքի անիվի էկրանին, ձախողվե՞լ է:
5.Ձեռքագործը գործելիս,Դուք պետք է սեղմեք և պահեք միացման կոճակները երկու կողմից
6.Արտակարգ իրավիճակների դադարեցման կոճակը բացվե՞լ է:
|
1.Ստուգեք, արդյոք ընդունիչն ու համակարգի X130 ցանցային պորտը միացված են ցանցային մալուխով
2.Ստուգեք և հաստատեք, թե արդյոք համակարգի PLC-ն գրված է մեր տրամադրած տեղեկատու նյութերի համաձայն:
3.Ստուգեք՝ արդյոք ստացողը վերաբերում է մեր տեղեկատվությանը և տրամադրված գործիքային ծրագրային ապահովմանը,Ճիշտ է սահմանել ցանցի պարամետրերը և ստացողի DB հասցեն և այլն:
4.Ստուգեք ձեռքի անիվի և ընդունիչի միջև
6հիմնական կանաչ վարդակից,Կապի գծերից երկուսը:485-Ա և 485-Բ,Արդյո՞ք այն ճիշտ և ապահով միացված է:,Կա՞ միացումի ընդմիջում:
|
|
|
Ստացողը սնուցվում է,Ստացողի աշխատանքային լույսը չի վառվում
|
1.Էլեկտրաէներգիայի աննորմալություն
2.Էլեկտրաէներգիայի լարերի սխալ
3.Ստացողի ձախողում
|
1.Ստուգեք, թե արդյոք էլեկտրամատակարարումը լարման է,
Արդյոք լարումը բավարարում է պահանջները
2.Ստուգեք, թե արդյոք էլեկտրամատակարարման դրական եւ բացասական բեւեռները կապված են հակադարձում
3.Վերադառնալ գործարանի սպասարկում
|

1.Խնդրում ենք սենյակային ջերմաստիճանում եւ ճնշում,Օգտագործվում է չոր միջավայրում,Ընդլայնեք ծառայության կյանքը。
2.Խնդրում ենք խուսափել անձրեւի մեջ թրջվելուց、Օգտագործվում է աննորմալ միջավայրում, ինչպիսիք են բշտիկները,Ընդլայնեք ծառայության կյանքը。
3.Խնդրում ենք մաքուր պահել ձեռքի մաքուր,Ընդլայնեք ծառայության կյանքը。
4.Խնդրում ենք խուսափել քամելուց、Ընկնել、Bumping եւ այլն:,Կանխել ճշգրիտ պարագաները ձեռքի տակ գտնվող վնասներից կամ ճշգրտության սխալներից。
5.Երկար ժամանակ չի օգտագործվում,Խնդրում ենք պահել ձեռքի եւ անվտանգ վայրում。
6.Ուշադրություն դարձրեք խոնավության եւ ցնցումների վրա պահպանման եւ փոխադրման ընթացքում。

1.Օգտագործելուց առաջ կարդացեք մանրամասն օգտագործման հրահանգները,Արգելվում է ոչ պրոֆեսիոնալ անձնակազմը。
2.Այն բանից հետո, երբ ցանկացած աննորմալ իրավիճակ է տեղի ունենում ձեռքի անիվի մեջ,Խնդրում ենք անմիջապես դադարեցնել այն օգտագործել,և վերացնել անսարքությունները,Նախքան անսարքությունները լուծելը,Արգելվում է կրկին օգտագործել անսարք ձեռքի անիվը,Խուսափեք անվտանգության վթարներից՝ ձեռքի անիվների անհայտ խափանումների պատճառով;
3.Եթե վերանորոգում է պահանջվում,Խնդրում ենք կապվել արտադրողի հետ,Եթե ինքնաբացարկի պատճառով պատճառված վնասը,Արտադրողը երաշխիք չի տրամադրի。





