
Controllo wireless Remoto COLLE AUTOMATICO DI SAW
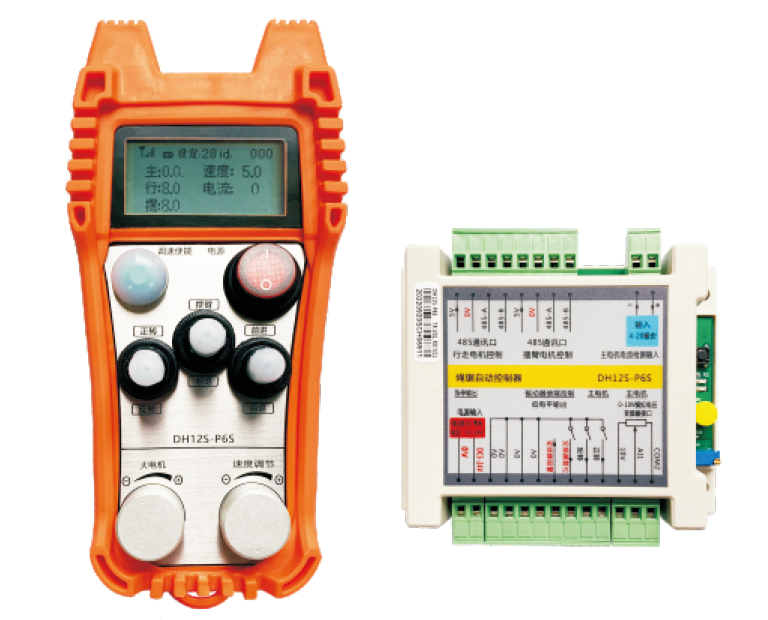
Controllo remoto wireless di taglio automatico della macchina della sega a filo DH12S-P6S
Descrizione


modello:Equipaggiamento adattatore DH12S-P6S:Macchina per sega a filo/lama


Osservazione:È possibile selezionare tre tipi di antenne,L'antenna di una ventosa predefinita è dotata di standard


Velocità del motore principale:ospite:0-50
Velocità del motore a piedi:OK:0-50
Motore di camminata automatico Motore massimo limite di velocità:velocità:0-30(I parametri sono regolabili)
Callo automatico del motore principale Imposta corrente:impostare:28(I parametri sono regolabili)
Velocità del motore del braccio di swing:Mettere:0-50

Bassa pressione:La batteria del telecomando è troppo bassa,Si prega di sostituire la batteria

Cadere da Internet:Interruzione del segnale wireless,Si prega di controllare l'alimentazione del ricevitore,Accendi di nuovo,Riavvia il telecomando

1、Remoto Control Accendi
Il ricevitore è acceso,La spia di alimentazione D2 sul ricevitore è sempre accesa,La spia di segnalazione D1 inizia a lampeggiare;Due batterie n. 5 installate sul telecomando,Accendere l'interruttore di alimentazione,Visualizza la velocità del motore di visualizzazione,Significa che l'avvio ha successo。
2、Motore principale e regolazione della velocità
Tieni premuto "Abilita controllo velocità",Girare l'interruttore "in avanti/reverse" in avanti,Il motore principale del ricevitore ruota in avanti e si accende;
Tieni premuto "Abilita controllo velocità",Girare l'interruttore "in avanti/reverse" in avanti,Il motore principale del ricevitore ruota in avanti e si accende;
Tieni premuto "Abilita controllo velocità",Girare l'interruttore "in avanti/contrario" in retromarcia,Il motore principale del ricevitore inverte la marcia e si accende;
Basta spostare l'interruttore al centro o al contrario,Il motore principale si ferma immediatamente,Non è necessario premere il controllo della velocità per attivarlo;
Ruota la manopola "Grande Motore".,La tensione di regolazione della velocità dell'inverter del motore principale del ricevitore può essere regolata su 0-10 V;
3、Motore di viaggio
3、Motore di viaggio
Tieni premuto "Abilita controllo velocità",Girare l'interruttore "in avanti/retro" in avanti o all'indietro,Il motore a piedi si muoverà ad alta velocità di 50;
4、Motore del braccio di swing e regolamentazione della velocità
Girare l'interruttore "braccio/ritorno" al braccio o schiena,Il motore del braccio di swing del ricevitore inizia;Quindi girare la manopola "Regolazione della velocità",Può regolare la velocità del motore del braccio di swing;
Tieni premuto "Abilita controllo velocità",Girare di nuovo l'interruttore "braccio/ritiro",Il motore del braccio di swing si muoverà ad alta velocità 50;
5、Regolazione del limite di velocità del motore a piedi
Premere e tenere premuto il pulsante "Speed Regola Abilita",La "regolazione della velocità" rotante può regolare il limite di velocità massima del motore a piedi durante il taglio automatico;
6、Taglio automatico
primo passo,Avviare il motore principale;Passaggio 2,Regolare il limite di velocità massimo del motore a piedi;Passaggio 3,Girare l'interruttore "in avanti/retro" in avanti o all'indietro,Immettere la modalità di taglio automatico;
7、Impostazioni dei parametri (gli utenti vietano la modifica privata)
Immettere il menu dei parametri:In modalità manuale,Quando la velocità principale del motore è 0,L'interruttore in avanti/inverso è piegato 3 volte di riga,Quindi romperlo 3 volte di seguito,Immettere il menu dei parametri;
Esci dal menu dei parametri:Speed Regolation Knob Page Turn,Scegli di salvare o non salvare,Premere il pulsante Abilita per confermare;
Corrente nominale:Valore massimo della corrente del motore principale,Unità ampere;
Parametri di regolazione della velocità:Parametri di controllo automatico del taglio,Predefinito 800,Milisecondi unitari,La modifica è vietata;
Parametri di decelerazione:Quando il valore della modifica della corrente di taglio supera questo valore,Inizia a rallentare rapidamente,Unità ampere;
Accelerazione A1:Quando la corrente di taglio è inferiore alla corrente di taglio del set,Il valore di velocità del motore a piedi aumenta per ogni accelerazione;
Decelerazione A2: Quando la corrente di taglio è superiore alla corrente di taglio del set,Il valore di velocità del motore a piedi si riduce ogni volta che decelera;
Corrente del braccio oscillante:valore predefinito,La modifica è vietata;
Tempo di fermo:Sovraccarico di corrente in modalità automatica dopo l'arresto,La corrente viene rilevata di nuovo ogni tanto,Se è inferiore alla corrente set,Avviare automaticamente il motore a piedi;Secondi dell'unità,valore predefinito,La modifica è vietata;
Tempo di fermo:Sovraccarico di corrente in modalità automatica dopo l'arresto,La corrente viene rilevata di nuovo ogni tanto,Se è inferiore alla corrente set,Avviare automaticamente il motore a piedi;Secondi dell'unità,valore predefinito,La modifica è vietata;
Corrente massima:Gamma di feedback corrente del motore principale,Unità ampere;
Host massimo:Speed Control Display Ranna del motore principale del telecomando;
Camminare massimo:Parametri non validi;
Offset del limite di velocità:Quando si taglia automaticamente,Limite di velocità del motore di viaggio sul display di telecomando = 50% di questo parametro;
Aggiungi sensibilità:Quando aumenta la corrente di feedback del motore principale,Il valore aumentato ogni volta supera questo valore,Accelerazione del motore a piedi;
Ridurre la sensibilità:La corrente di feedback del motore principale diminuisce,Il valore ridotto ogni tempo supera questo valore,Il motore a piedi rallenta;
Compensazione della sensibilità:Incremento dell'offset per i parametri di sensibilità più e meno;
Imposta la corrente:Taglio automatico,Soglia della corrente di feedback del motore principale,superare questo valore,Il motore a piedi inizia a rallentare;al di sotto di questo valore,Il motore a piedi inizia ad accelerare;Unità ampere;
Imposta la corrente:Taglio automatico,Soglia della corrente di feedback del motore principale,superare questo valore,Il motore a piedi inizia a rallentare;al di sotto di questo valore,Il motore a piedi inizia ad accelerare;Unità ampere;
Uscita vuota:Quando si avvia la modalità automatica,Se la corrente di feedback del motore principale è inferiore a questo valore,è in modalità di inattività,maggiore di questo valore,quindi uscire dalla modalità di inattività,Entra nella modalità di taglio,Unità ampere;
Corrente a vuoto:Quando si avvia la modalità automatica,Se la corrente di feedback del motore principale è inferiore a questo valore,In nessuna modalità di caricamento,maggiore di questo valore,Esci dalla modalità senza carico,Entra nella modalità di taglio,Unità ampere;
Velocità di swing:Velocità iniziale dell'avvio del motore del braccio di swing;
Modalità di taglio:Passa tra sega a lama e sega a filo,Dopo aver cambiato i parametri, anche i parametri verranno commutati di conseguenza.;In modalità sega a lama,Il display del telecomando aggiunge il motore del braccio di swing,Non esiste un motore altalena in modalità sega a filo;
Tempo di debozza:Quando la corrente di feedback del motore principale supera la corrente di arresto,La corrente di feedback verrà continuamente rilevata,Il tempo di debozza è la durata di questo rilevamento continuo,Più di questo tempo,Rilevare la corrente del motore principale supera ancora la corrente di arresto,camminareIl motore si fermerà;Altrimenti, il motore a piedi continuerà a andare avanti;
Fermare la corrente:La corrente di feedback del motore principale supera questo valore,Il motore a piedi si fermerà;Unità ampere;
Offset predefinito:Il valore iniziale del limite di velocità del motore di viaggio quando il telecomando è acceso = 50% di questo valore;
![]()
| Alimentazione operativa del ricevitore |
DC24V/1A (alimentazione indipendente)
|
| Carico punto di uscita del ricevitore | AC0-250V/3A DC0-30V/5A |
| Tensione di uscita della regolamentazione della velocità del ricevitore | DC0-10V |

Il diritto finale di interpretare questo prodotto appartiene a Chengdu Xinshen Technology Co., Ltd.。




-500x650.png)
