Automatic secans Wireless Remote Control Crawler funem vidit
Crawler funem vidi apparatus-automatic wireless remote control dh12s, ld
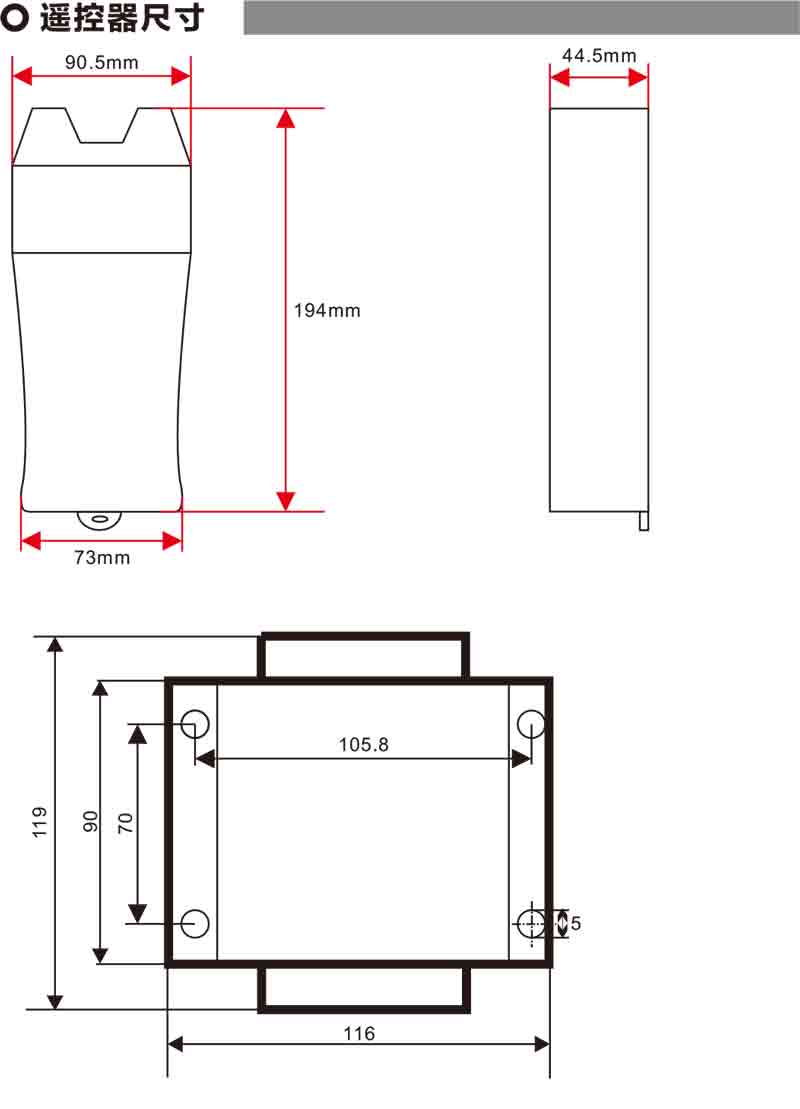
Descriptio

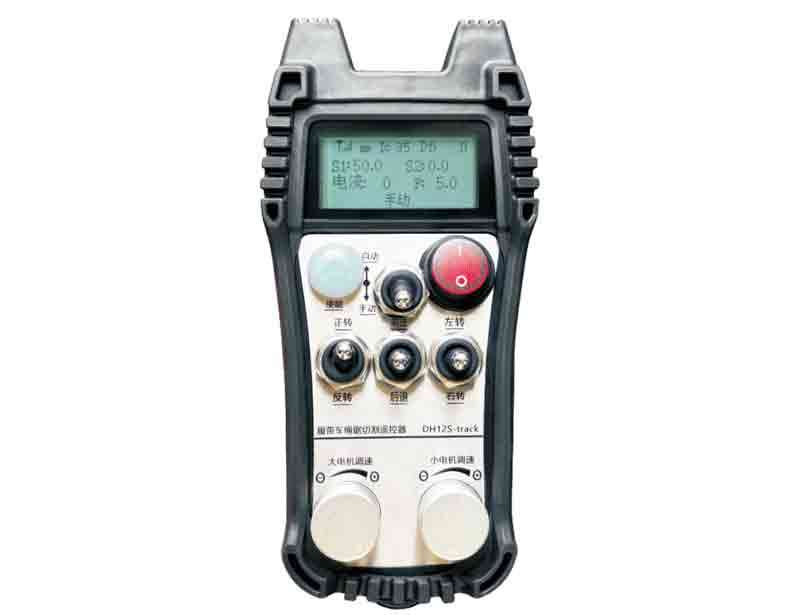
exemplar:DH12S, LD Adaptive apparatu:Crawler funem sasing apparatus

Adnotatio:Tria Antennas potest electus,Default Suction Cup Antenna instructum est vexillum 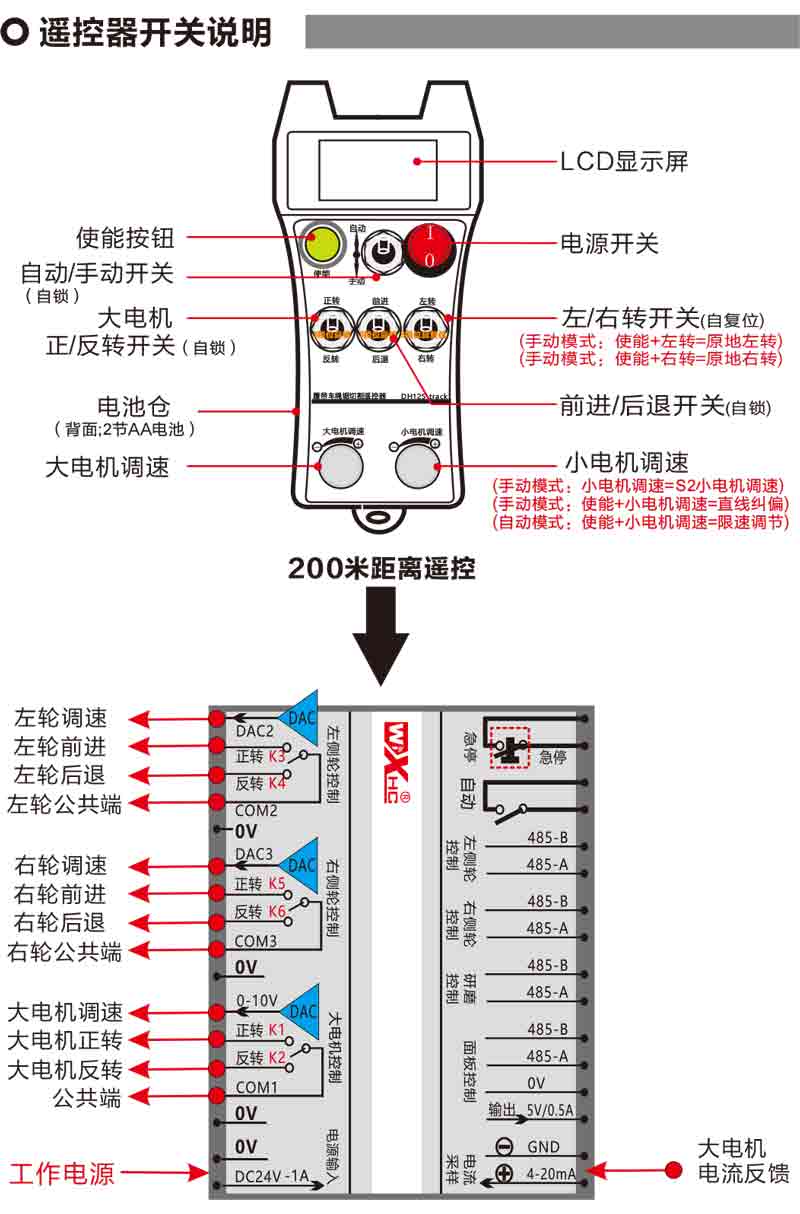

Magna motor celeritate:S1:0-50
Motor Speed:S2:0-50
Automatic secans motor maximum celeritate terminum:F:0-30(Quod parametri sunt Novifacta)
Automatic secans maximam current:IC:0-35(Quod parametri sunt Novifacta)
Linearem deviationem coronation pretii:DF:-99-99(I unitas est circa 0.02v)
Humilis pressura:Pugna remotis imperium nimis,Placere reponere in altilium
Ex interrete:Wireless signum interruptio,Placere reprehendo recipiens potentia copia,Power in Iterum,Sileo in remotis imperium
![]()
1、Remote control conversus in
Receptor est Powered,Et RF-DUXERIT lux in recipiente incipit mico;Duo No. V batteries installed in remotis imperium,Turn in virtute switch,Display Display motricium celeritate,Hoc est in startup est felix。
2、Magna motor et celeritate ordinacione
Turn "deinceps / Reverse" SWITCH PB,Receptoris magna motor vices,Display ostentationem deinceps gyrationis ;
;
Turn in "deinceps / Reverse" Switch ad Reverse,Receptor magna motor reverso,Display display inversionem ;
;
;Turn in "deinceps / Reverse" Switch ad Reverse,Receptor magna motor reverso,Display display inversionem
;Rotate "magna motor celeritate ordinacione" Knob,Potest adjust in output intentione de recipientis magna motor celeritate ordinatione 0-10v;
3、Motor et celeritate moderando
Turn "deinceps / Reverse" SWITCH PB,Receptor Revolver progressus et ius profectum aperta,PRAESUMPTO
Turn in "deinceps / Reverse" switch ad tergum,Receptivum Reversi et ius rotam revocatas aperta,DISPENSIO
In manual modus:Rotate "Motor Motor celeritate ordinacione" Knob,Simul, adjust in output intentione de recipientis scriptor sinistram rotam rotam rotam celeritate 0-10v;
In manual modus:Rotate "Motor Motor celeritate ordinacione" Knob,Simul, adjust in output intentione de recipientis scriptor sinistram rotam rotam rotam celeritate 0-10v;
4、Turn sinistram et iustum
Turn in "sinistram / ius" switch ad sinistram,Receptor iustum rotam progreditur aperire,Propono ostentationem vicissim
Turn in "sinistram / ius" switch ad dextram,Receptor Revolver antecessum opens,Propono propono vicissim
5、Conversus
In manual modus:
Turn in loco:Torcular et tenere ad activare button,Turn in "sinistram / ius" switch ad sinistram,Receptoris Reversae et ius rotam antecessum aperti,Satus conversus in locum;
CONVENTO:Torcular et tenere ad activare button,Turn in "sinistram / ius" switch ad dextram,Receptaculum scriptor revolver advances et dextram-rota terga aperit,Satus conversus in locum;
6、Parvus motor celeritate terminum temperatio
In Lorem Modus:Torcular et tenere ad activare button,Rotate "parva motricium celeritate ordinacione" ad adjust maximam celeritate parva motricium per automatic secans;
7、CAECORUM
primus gradus,Satus magna motor;
Gradus II,Switch modus switch ad "Auto";
Gradus III,Satus parva motricium,In screen ostentationem intrat "secans automatic",Indicat quod automatic secans modus est ingressus;
Gradus II,Switch modus switch ad "Auto";
Gradus III,Satus parva motricium,In screen ostentationem intrat "secans automatic",Indicat quod automatic secans modus est ingressus;
8、Recta disciplinam
Cum sinistro ius motricium movens retro,Differentia sinistris et celeritatum,Recta linea ambulans offset,Linearibus deviationem disciplinam munus in remotis potestate potest esse,Fine-tune celeritas sinistram et rotae;
PROPRESSUS:Per bias disciplinam munus,Fine-Tune Revolver celeritate,Ad consequi idem celeritate rotam,Intellego synchronization sinistra dextera rota celeritatibus,Eliminate offsets;
Correptione operatio modum:In manual modus,Torcular et tenere ad activare button,Rotate "parva motricium celeritate ordinatione";
Rotate clockwise,Proventus revolver celeritate voltage,Auxit deviation correptione valorem de ostentationem screen;
Rotate counterclockwise,Redigendum revolver celeritate voltage,Display deviation corrigenda pretii reducitur;
Corrigendum range:Correptione valorem -90 ad XC;1Et bias disciplinam voltage cuiusque deviationem disciplinam unitas sit circa 0.02v;
9、Parameter menu (user prohibet privata immutatio)
Quidam munera remotis potestate potest esse adaequatum per parametrum,In manual modus,Cum celeritas parva motricium S2 est X,
Porro / Reverse switch est inclinatum III temporibus in ordine,Tunc conteram illud III tempora in ordine,Intra parametri menu;
Exit parametri menu:Eligere nisi nec,Deinde premere ad activare puga confirmare exitus;
Maximus current:Working Current de Cutting motricium,Et cutting Current est LXXX% huius current;
Celeritate ordinatione parametri:Automatic secans imperium parametri,Default DCCC,Mutatio est prohibitus;
Reticulumque parametri:Automatic secans imperium parametri,Cum cutting current mutatio valorem excedit hoc valore,Satus tarditatem
Acceleratio A1: Automatic secans imperium parametri,Cum autem cutting current est inferior quam set secans current,Celeritas usque tardius;
A2 torpet: Automatic secans imperium parametri,Cum cutting current est altior quam set secare current,Lento;
Automatic Clife Collection:irritum;
Satus sui densis:0,Non claudere te;1,Auto-densis. Torcular ad activare key + deinceps et vicissim ut effectus,Et clausum est;
Maximum ambulans:Minimum motricium celeritate;
Cutting:Set ad maximum current valorem de principalis motricium pro automatic secans,In feedback current excedit hoc valore,Satus tarditatem;
Default celeritas terminum:Cum Powering in,Default maximam celeritate pro automatic secans celeritate;
Lorem modus:0,Automatic SWITCH sit automatic Imperium;1,Automatic switch imperium automatic io output parte;
Celeritate terminum offset:Cum cutting automatice,Maxime celeritas parva motricium;
Maximum exercitum:Magna motor maximam celeritate.
| Reciperit operating potentia copia | DC24V / 1a (Lorem Power copia) |
| Receptor output parte onus | AC0-250V / 3A DC0-30V / 5A |
| Receptoris celeritate ordinatione output intentione |
Dc0-10v
|