
Automatic secans Wireless Remote Control Crawler funem vidit
Dh12s-2r-LD-CDLXXXV Crawler funem vidit cutting remote control
Descriptio


Crawler filum serrae latae sectionis remotae imperium idoneum ad trahens machinis serram serravit,Utere 485Modbus RTU protocollum ad moderandum inverters dextra laevaque reptans,Tam magna frequentia motoris quam conversionis celeritatis regulae initium et initium et ante, post, a sinistra et dextra directionem moderatoris。Actio agitatio motoris magni perlegere potest protocollo 485-Modbus RTU,Analysis et comparatio magnae motoris currentis ad startup,Automatice adjust sinistram et ius track celeritates in real vicis,Intellego munus ipso sectione。

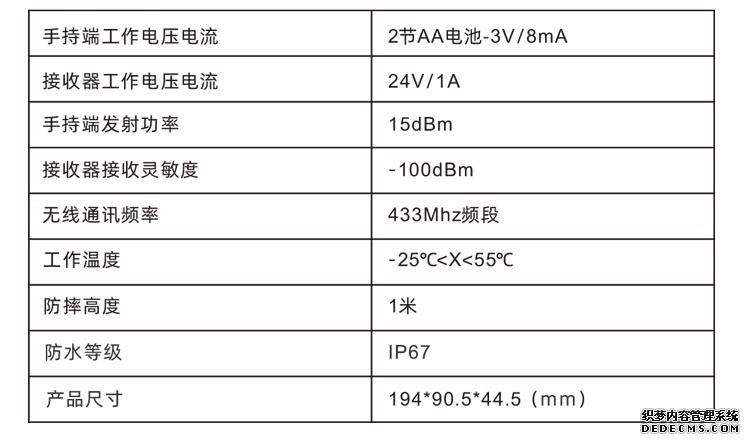
1.433MHz adopt Wireless Communication Technology,Wireless operating spatium C metris。
2.Adopt automatic frequentius salit munus,Usus XXXII occidere wireless remote controls simul,Nullus effectus in se。
3.Sustinet omnem frequentiam convertentium cum 485-Modbus RTU protocollo,In inverter brands includit currently accommodata: Shanghai Xielin、Fuji、Huichuan、Zhongchen、INVT、Yasukawa Tatsu。Si notam non adaptat, pete nobis ad css.。
4.Suscipe magna motricium inverter startup、celeritas ordinationem、Current Lectio。
5.Support sinistram et ius crawler invertere celeritate temperatio、satus sursum、Pronao et postico dextra imperium。
6.Support sinistram et ius crawler invertitur correctioni lineari,Custodi machinam in directum。
7.Support filum ipso secante munus vidit,Secundum magnam motricium current notitia,Automatice adjust sinistram et ius track celeritates in real vicis。
8.Est etiam compatible cum directo IO output ut motor principium et desinas regere.,Analog voltage output controls motoris velocitatis。



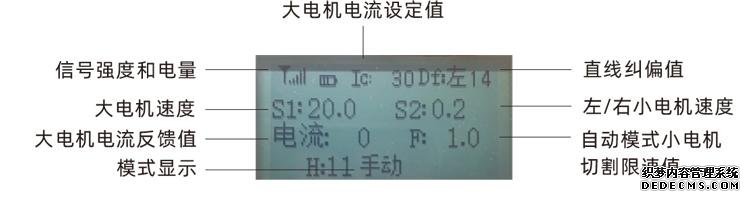
Commentatio: Screen ostentationem:
Modus switch:
Accipere II-celeritate switch,Potest commutandum inter automatic et manual modos,Respondens modus propono mutandi in screen ostentationis erit.。
Admitte:
Compositum button,Quaedam operationes requirunt instans et tenens facultatem puga operandi,Videte descriptionem cuiusque transibit ad singula.。
Large motricium switch:
Accipere III-celeritate reset switch,flip hoc switch,Potest moderari deinceps et vicissim gyrationis magnarum motorum,Status remanebit post dimissionem,Propono par erit in ostensione,Sagitta indicat ante gyrationis,Sagitta indicat mutationem。
Parvus deinceps motricium / switch contra:
Accipere III-celeritate auto-densis switch,flip hoc switch,Potest control parva motricium progrediendi et retrorsum,Propono par erit in ostensione,Sagitta significat incedendo,Retro Sagitta indicat。
Longinquus imperium potentiae switch:
Magna celeritate motoris valorem mutationes per unitates circiter 0,2, Usura multi rursus encoder sphærulæque simul,Verte nodi,Magna celeritate motricium adjust S1。I frame per rursus, Celeri gyrationis cito mutare potest magnum celeritatis motoris valorem。
Parvus motricium conversionis switch:
Accipere III-celeritate reset switch,Hoc in manual modus switch Turn,Potest control parva motricium ad dextram et sinistram averte,Remota potestate sponte cessabit hanc actionem post dimissionem.。 In deinceps status,flip hoc switch,Propono par erit in ostensione,Sagitta indicat sinistram rursus,→ Sagitta indicat dextram。 In receptum statum,flip hoc switch,Propono par erit in ostensione,Sagitta indicat sinistram rursus,→ Sagitta indicat dextram。 Torcular et tenere ad enable,Tum flip hoc switch,In situ conversionis munus praestare potest,Turn citius。
Motricium magnarum celeritas ordinatio :
Magna celeritate motoris valorem mutationes per unitates circiter 0,2, Usura multi rursus encoder sphærulæque simul,Verte nodi,Magna celeritate motricium adjust S1。I frame per rursus, Celeri gyrationis cito mutare potest magnum celeritatis motoris valorem。
Parvus regulatio celeritas motricium:
(declinationis linearis correctio) adoptat multi- sphæra rursus encoder,In manual modus,Quoties nodus est I gradus,Celeritas valorem parvae mutationes motoris circa 0,1 unit,Velox gyratio cito potest velocitatem pretii parvi motoris mutare。In Lorem Modus,Press enable button,Tum gyrari I frame omni tempore,Parva celeritas motoria limitis valorem F mutationibus circa 0,1 unit,Velox gyrationis celeritas terminum celeritatis parvae motorum potest cito mutare。Press enable button,Nodum dextram,Recta correctionis ostensionem:DF:relictum,Quaelibet vertente nodi augetur per 1 unitatem.;Turn sphærulæque ad sinistram,Recta correctionis ostensionem:DF:jus,Quaelibet vertente nodi augetur per 1 unitatem.;Quaelibet unitas correctionis respondet celeritati motoris dispositioni avi intentioni circa 0.02V.。



Product installation gradus
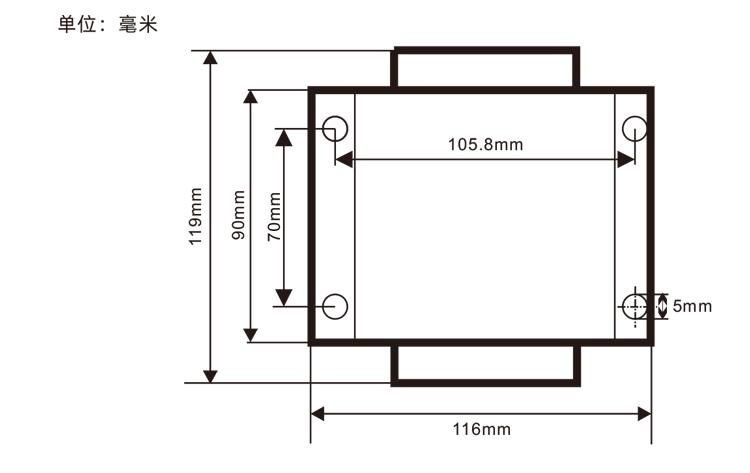
1.Install in receptator in electrica scrinium per frangeretur-in in tergum,Vel institue in cistula electrica per cochleam foramina in quattuor angulis recipientis。
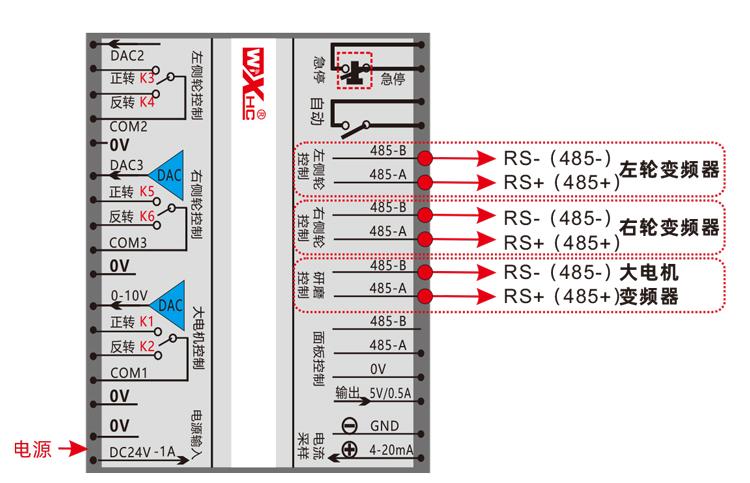
2.Refer ad receptaculum Wiring Diagram,Compare vestri on-site apparatu,Coniungere fabrica ad accipientis per fila。
3.Post receptam fixa,In antenna instructa cum recipientis est connected,Et institue vel pone finem extremum antennae extra scrinium electricum,Commendatur ponere signum super summitatem electrica scrinium.,Non licet Disconnect Antennae,Aut pone antennae intra scrinium electrica,Hoc inveniatur in paupere signo et inutile。
4.Denique, gravida installare in potestate remota,Obstringere in altilium operimentum,Et conversus in potentia switch remotis potestate,Remota potestate ostentus normalem interfaciem ostendet.,Potestatem praestare remotis imperium operandi。
Receptor installation magnitudine
Receptor Wiring reference Diagram

Remota imperium parametri occasus
Intra modum remote control background parametri:Movere modus switch ad manual modus,Motricium celeritatem ad parvam adjust in XXV ", aut 0、10、20、40、50,Motricium deinceps gyrationis transitum trahere magnum III tempora sustentabatur,Destruam III vicibus;
"Parvus motor celeritatis Temperatio" nodi paginas convertendi,Post pressionem efficiendi, nodi mobilis mobiles vertere parvam potestatem nodi parametri temperandi.; Post modificationem,Verte paginam usque ad finem,Lego salvum et Exitus,Premere puga enable exire in menu;
Parametri sunt: Maxime current:Magna motricium current feedback valorem range,Profecta range 15-200A,Default 60;
Celeritas imperium parametri:Automatic modus parva motricium sponte accelerat celeritatem,Minores, velociores,Rhoncus 200-1500, Default 1000;
retardationem parametri:Constitue autem superiorem terminum permissus celeritate mutationes motricium,Cum hodiernam mutationem valorem excedit,non morabor。 Minora,Sinistra et dextra motores citius retardant,Range 05-12,Default 06;
Satus sui densis: Acceleratio a1:Quo maior motor est, eo celerius crescit celeritas.,Range 00-06,Default 01;
retardatio a2:Quo maior celeritas motoris est, eo citius decrescet.,Range 00-06,Default 02;
Admitte celeritate temperatio:Estne necesse urgere Admitte velocitatem motorum parvorum accommodare?,00inactivare,01da ",Default 01;
Num amplus motor automatice sui densis conservabit post transitum antrorsum et vicissim dimissum?,00non ponere,01Serva,Default 01;
maximum walking:Maximam celeritatem sinistram et ius motorum,Range 10-100,Default 50;
Cutting:Maximum sectionis current,In screen ostendit IC valorem,Range 15-160,Default 30,Screen ostentationem correspondentes IC:30。Superior modus huius parametri = maximam vena x80%;
Default celeritate terminum:Defectus parva motor automatic secans celeritatem ad startup,Range 00-100,Default 10,Tegumentum ostenderet F1.0,Hic modulus solum accurate cum maximus ambulatio ad 50 . ponitur。
wireless channel:Default 10,Cum remota potestate signum instabile est,Aut si est signum impedimentum in situ,Hoc modulo immutabile,switch channel,ne perturbationibus;
Celeritate terminum offset:Parvus motor automatic secans celeritatem evolvimus,Range 00-200,Default 60,Tegumentum respondet 6.0;Propono valorem superius terminum = celeritate terminum offset 0.1;
maximum exercitum:Maximam celeritatem magnarum motricium,Range 10-100,Default 50;
mbus fabrica (requiritur):Magnum exemplar movens inverter lectio,Range 00-03,Default 03;
00-Shanghai Xielin I-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
sbus fabrica (requiritur):Exemplar lectionis parvae motoris invertere,Range 00-05,Default 03;
00-Shanghai Xielin I-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
04-Yasukawa Tatsu 05-Nonam
Frequentiam converter parametri occasum
1.Imperium fons delectu:Communication imperium channel
2.Principalis frequency fons lectio:communicationis datum
3.baud rate:19200
4.Data forma:Non checksum,Data forma<8-N-1>
5.Locus electronicus:Sinistra frequency converter profectus est ad 1,Ius frequentiae converter ponitur 2,Magnus motor inverter est profectus ad 3
Remota imperium operating instructiones
1.Et apparatus est Powered,Remote control conversus in,Intrant remote control background,Constitue background ambitum remotum imperium,Summa est, exempla inversorium parvarum motorum et magnorum motorum (omit hoc gradum si machina fabrica eam posuit);
2.Parametros invertor pone (omit hunc gradum si machina fabrica ponat);
3.Remota potestate ad flectendum manual modus,Tum remota potestate movere machinam ad operantes situm;
4.In manual modus,Set magnum motricium secans current valorem IC,Motricium celeritatem maximam constitue;
5.Transibit ad automatic modus,Motricium parva celeritate ad terminum F valorem secans profectus est;
6.In Lorem Modus,Motricium magnus convertat switch ut deinceps ad magnum motricium incipere,Et convertat parva motricium switch ut deinceps vel vicissim calces,Remota potestate intrat ipso sectione modus,Satus CAESUS。


1.Placere ad locus temperatus et pressura,Usus est in siccis environments,Vita extend muneris。
2.Quaeso ne questus infectum in pluvia、Usus est in abnormes environments ut pusters,Vita extend muneris。
3.Conserva in altilium cellula et metallum shrapnel area munda。
4.Quaeso vitare expresses et omissas potestates remotas, quae damnum inferant.。
5.Non propter longo tempore,Please removere altilium,Et reponunt remote control et altilium in mundum et tutum est。
6.Operam ad humorem probationem et inpulsa-probationem in repono et translationem。

1.Placere legunt instructiones ad usum in detail ante usum,Non-professional personas prohibitus。
2.Placere reponere altilium tempore cum altilium nimis humilis,Vitare errores ab insufficiens pugna potentiae causando potestatem remotam ut inoperabiles sint.。
3.Si reficere non requiritur,Placere contact fabrica,Si damnum fecit per sui instaurabo,Et manufacturer non providere a warantum。
(Remark:Productum upgrade vel upgrade situ,Cum emendas emendas, colloquare cum auctionibus virgam pro producto statu recenti)
-500x650.png)



-500x650.png)
