
Wire saw machine ຕັດອັດຕະໂນມັດການຄວບຄຸມໄລຍະໄກໄຮ້ສາຍ
ການຕັດລວດລາຍແບບອັດຕະໂນມັດແບບອັດຕະໂນມັດຂອງສາຍສາຍທີ່ມີສາຍ DH12S-P6S
ລາຍລະອຽດ


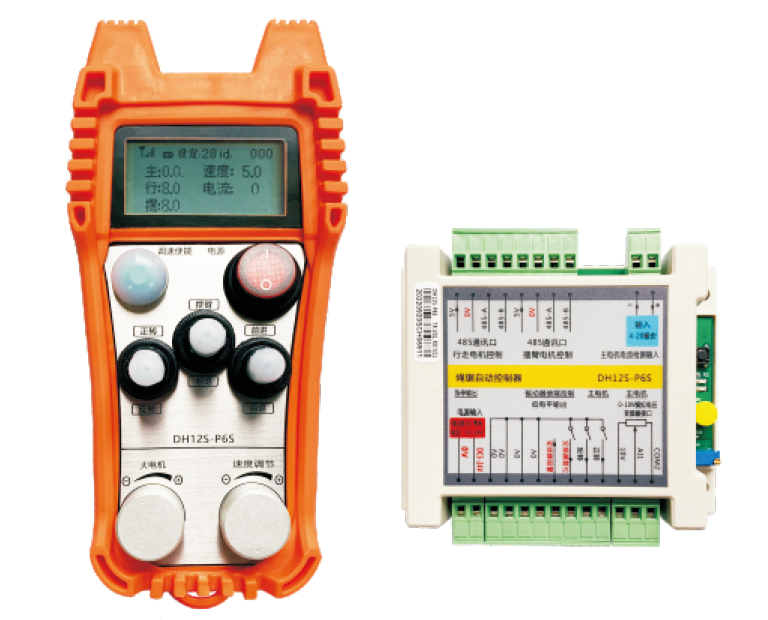
ແບບ:DH12S-P6S 适配设备:绳锯/片锯机


ຂໍ້ສັງເກດ:ສາມປະເພດຂອງເສົາອາກາດສາມາດເລືອກໄດ້,ເສົາອາກາດເຕະບານໃນຕອນຕົ້ນແມ່ນມີມາດຕະຖານ


主电机速度:主:0-50
行走电机速度:行:0-50
自动切割行走电机最高限速:ຄວາມໄວ:0-30(ຕົວກໍານົດການແມ່ນສາມາດປັບໄດ້)
自动切割主电机设定电流:设定:28(ຕົວກໍານົດການແມ່ນສາມາດປັບໄດ້)
摆臂电机速度:摆:0-50

ຄວາມກົດດັນຕ່ໍາ:ແບັດເຕີຣີຂອງການຄວບຄຸມໄລຍະໄກແມ່ນຕໍ່າເກີນໄປ,ກະລຸນາທົດແທນແບັດເຕີຣີ

ຕົກອອກຈາກອິນເຕີເນັດ:ການຂັດຂວາງສັນຍານໄຮ້ສາຍ,ກະລຸນາກວດເບິ່ງການສະຫນອງພະລັງງານຂອງຜູ້ຮັບ,ພະລັງງານອີກເທື່ອຫນຶ່ງ,ເລີ່ມຕົ້ນການຄວບຄຸມໄລຍະໄກ

1、ການຄວບຄຸມໄລຍະໄກເປີດ
ຜູ້ຮັບແມ່ນໃຊ້ໄດ້,接收器上D2电源灯常亮,D1信号灯开始闪烁;ຫມໍ້ໄຟ 5 ອັນດັບ 5 ຕິດຕັ້ງຢູ່ໃນການຄວບຄຸມໄລຍະໄກ,ເປີດໃຊ້ໄຟຟ້າ,ສະແດງຄວາມໄວໃນການສະແດງ,ມັນຫມາຍຄວາມວ່າການເລີ່ມຕົ້ນແມ່ນປະສົບຜົນສໍາເລັດ。
2、主电机和调速
按住“调速使能”,ປ່ຽນ "ຕໍ່ຫນ້າ / ປີ້ນກັບກັນ" ເພື່ອສົ່ງຕໍ່,接收器主电机正转打开;
按住“调速使能”,ປ່ຽນ "ຕໍ່ຫນ້າ / ປີ້ນກັບກັນ" ເພື່ອສົ່ງຕໍ່,接收器主电机正转打开;
按住“调速使能”,ປ່ຽນ "Forward / Reverse" ປ່ຽນໄປປີ້ນກັບກັນ,接收器主电机反转打开;
直接将开关扳到中间或者反向,主电机立即停止,无需按调速使能;
旋转“大电机”旋钮,可以调节接收器主电机变频器调速电压0-10V;
3、行走电机
3、行走电机
按住“调速使能”,将“前进/后退”开关扳到前进或者后退,行走电机将以高速50进行移动;
4、摆臂电机和调速
将“摆臂/后退”开关扳到摆臂或者后退,接收器的摆臂电机启动;然后旋转“速度调节”旋钮,可以调节摆臂电机速度;
按住“调速使能”,再扳动“摆臂/后退”开关,摆臂电机将以高速50移动;
5、行走电机限速调整
按住“调速使能”按钮,旋转“速度调节”可以调整自动切割时行走电机的最大限速;
6、ການຕັດອັດຕະໂນມັດ
ຂັ້ນທໍາອິດ,启动主电机;ຂັ້ນຕອນທີ 2,调整行走电机的最大限速;ຂັ້ນຕອນທີ 3,将“前进/后退”开关扳动前进或者后退,进入自动切割模式;
7、参数设置(用户禁止私自修改)
ໃສ່ເມນູພາລາມິເຕີ:ໃນຮູບແບບຄູ່ມື,在主电机速度为0时,ສົ່ງຕໍ່ / ປີ້ນກັບກັນແມ່ນໂຄ້ງຂຶ້ນ 3 ຄັ້ງຕິດຕໍ່ກັນ,ຫຼັງຈາກນັ້ນ, ທໍາລາຍມັນ 3 ຄັ້ງຕິດຕໍ່ກັນ,ໃສ່ເມນູພາລາມິເຕີ;
ອອກຈາກເມນູພາລາມິເຕີ:速度调节旋钮翻页,选择保存或不保存,ກົດປຸ່ມ Enable ເພື່ອຢືນຢັນ;
额定电流:主电机电流的最大值,单位安培;
ຕົວກໍານົດການລະບຽບຄວາມໄວ:ຕົວກໍານົດການຕັດໂດຍອັດຕະໂນມັດ,ຄ່າເລີ່ມຕົ້ນ 800,单位毫秒,ການດັດແປງແມ່ນຖືກຫ້າມ;
ຕົວກໍານົດການ decelation:ໃນເວລາທີ່ການຕັດມູນຄ່າການປ່ຽນແປງໃນປະຈຸບັນເກີນມູນຄ່ານີ້,开始急速减速,单位安培;
ການເລັ່ງ A1:ໃນເວລາທີ່ກະແສການຕັດແມ່ນຕໍ່າກ່ວາການຕັດທີ່ກໍານົດໄວ້ໃນປະຈຸບັນ,行走电机每次加速增加的速度值;
deceleration A2: ໃນເວລາທີ່ກະແສການຕັດແມ່ນສູງກ່ວາການຕັດທີ່ກໍານົດໄວ້ໃນປະຈຸບັນ,行走电机每次减速减少的速度值;
摆臂电流:默认值,ການດັດແປງແມ່ນຖືກຫ້າມ;
停止时间:自动模式电流超载停机后,隔一段时间再次检测电流,如果小于设定电流,自动启动行走电机;单位秒,默认值,ການດັດແປງແມ່ນຖືກຫ້າມ;
停止时间:自动模式电流超载停机后,隔一段时间再次检测电流,如果小于设定电流,自动启动行走电机;单位秒,默认值,ການດັດແປງແມ່ນຖືກຫ້າມ;
ກະແສສູງສຸດ:主电机反馈电流的范围,单位安培;
ເຈົ້າພາບສູງສຸດ:遥控器主电机调速显示范围;
ການຍ່າງສູງສຸດ:无效参数;
ຂອບເຂດຈໍາກັດຄວາມໄວ:ເມື່ອຕັດໂດຍອັດຕະໂນມັດ,遥控器显示屏行走电机限速=此参数的50%;
加灵敏度:主电机反馈电流增大时,每次增大的值超过此值,行走电机加速;
减灵敏度:主电机反馈电流减小时,每次减小的值超过此值,行走电机减速;
灵敏度偏移:加和减灵敏度参数的偏移增加量;
设定电流:ການຕັດອັດຕະໂນມັດ,主电机反馈电流的门限,超过此值,行走电机开始减速;低于此值,行走电机开始加速;单位安培;
设定电流:ການຕັດອັດຕະໂນມັດ,主电机反馈电流的门限,超过此值,行走电机开始减速;低于此值,行走电机开始加速;单位安培;
空走退出:自动模式开始时,如果主电机反馈电流小于此值,则处于空走模式,大于此值,则退出空走模式,进入切割模式,单位安培;
空载电流:自动模式开始时,如果主电机反馈电流小于此值,则处于空载模式,大于此值,则退出空载模式,进入切割模式,单位安培;
摆臂速度:摆臂电机开机初始速度;
切割模式:片锯和绳锯两种模式切换,切换后参数也对应切换;片锯模式下,遥控器显示屏增加摆臂电机,绳锯模式则没有摆臂电机;
去抖时间:主电机反馈电流超过停止电流时,将持续检测反馈电流,去抖时间就是这个持续检测的时长,超过这个时间,检测主电机电流依然超过停止电流,行走电机将停止;反之则行走电机会继续前进;
停止电流:主电机反馈电流超过此值,行走电机将停止;单位安培;
偏移默认:遥控器开机时行走电机限速的初始值=此值的50%;
![]()
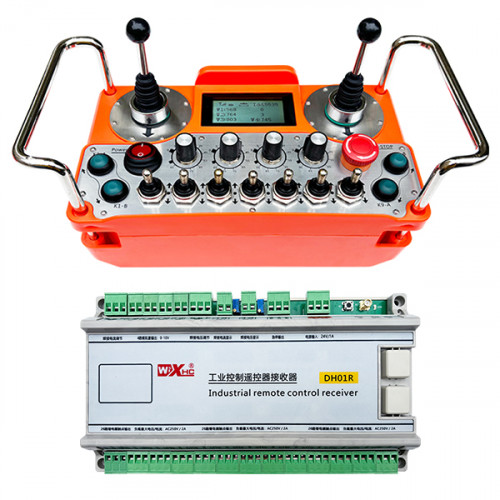
| ການສະຫນອງພະລັງງານຂອງຜູ້ຮັບ |
DC24V / 1A (ການສະຫນອງພະລັງງານທີ່ເປັນເອກະລາດ)
|
| ການໂຫຼດຈຸດເດັ່ນຂອງເຄື່ອງຮັບ | AC0-250V/3A DC0-30V/5A |
| ຄວາມໄວສູງຂອງການສະຫນັບສະຫນູນຄວາມໄວ | DC0-10V |

ສິດທິສຸດທ້າຍໃນການຕີຄວາມຫມາຍຂອງຜະລິດຕະພັນນີ້ເປັນຂອງບໍລິສັດ Tengdu Xalshen ບໍລິສັດ Tongdu.。

-500x650.png)

-500x650.png)
