
Roda tangan elektronik wayarles/roda tangan elektronik/roda tangan/roda tangan elektronik CNC roda tangan elektronik wayarles XWGP-ETS-FANUC
Berkenaan dengan sistem Fanuc CNC.
Fanako khas Handwheel XWGP–ETS-FANUC
Penerangan

Roda tangan elektronik wayarles digunakan untuk panduan manual alatan mesin CNC、kedudukan、Operasi mogok。Produk ini menggunakan teknologi penghantaran tanpa wayar,Menghilangkan sambungan wayar musim bunga tradisional,Mengurangkan kegagalan peralatan yang disebabkan oleh kabel,Seret kabel percuma,Kelemahan seperti noda minyak,Operasi yang lebih mudah。Model roda tangan elektronik tanpa wayar ini ialah roda tangan khas untuk sistem FANUC.,Paparan masa nyata koordinat sistem FANUC pada skrin roda tangan melalui protokol IO-LINK,Dan melalui protokol IO-LINK,Pilih paksi secara langsung、pembesaran、Sistem capaian isyarat butang,Kurangkan pendawaian。

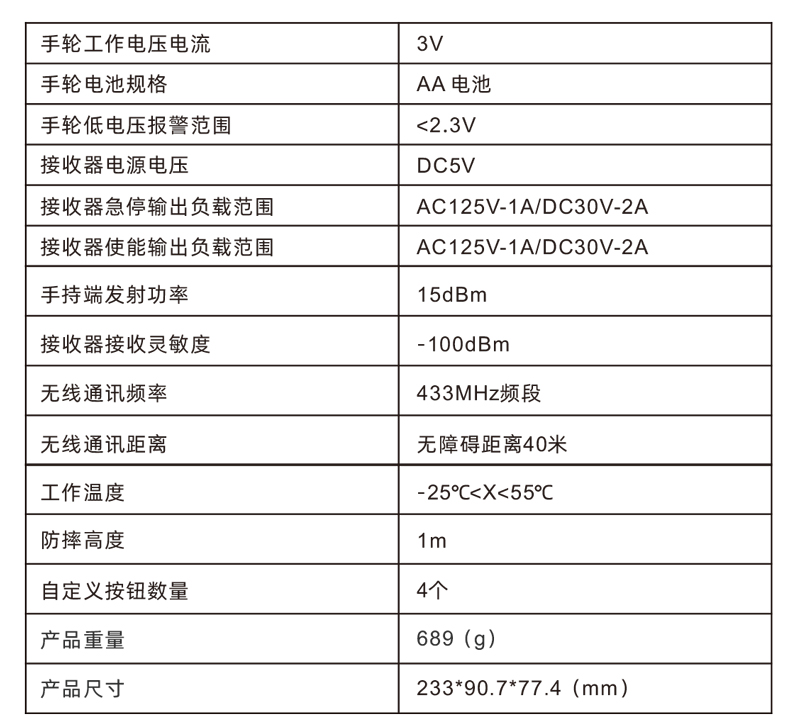
1.Mengamalkan teknologi komunikasi tanpa wayar 433MHz,Jarak operasi tanpa wayar 40 meter;
2.Mengamalkan fungsi melompat frekuensi automatik,Gunakan 32 set kawalan jauh tanpa wayar pada masa yang sama,Tidak ada kesan antara satu sama lain;
3.Sokong butang berhenti kecemasan,Menukar output isyarat IO,Sambungkan ke sistem melalui pendawaian IO;
4.Menyokong 4 butang tersuai,Menukar isyarat IO,Isyarat output kepada sistem melalui protokol IO-LINK;
5.Menyokong butang pergerakan pantas + dan -,Tekan dan tahan butang untuk menggerakkan mesin dan bukannya roda tangan;
6.Menyokong kawalan 6 paksi,Menukar isyarat IO,Isyarat output kepada sistem melalui protokol IO-LINK;
7.Menyokong kawalan pengganda 3 kelajuan,Menukar isyarat IO,Isyarat output kepada sistem melalui protokol IO-LINK;
8.Sokongan Aktifkan fungsi butang,Sambungkan ke sistem melalui pendawaian IO,Pengekod kawalan membolehkan pada masa yang sama;
9.Sokongan Pulse Encoder,100Pulse/giliran,Akses antara muka roda tangan MPG sistem dengan mengeluarkan isyarat berkod AB;



Komen:
Komen:
①Butang berhenti kecemasan:
Tekan butang berhenti kecemasan,Dua kumpulan output IO Stop kecemasan pada penerima terputus,Dan semua fungsi roda tangan tidak sah。Selepas melepaskan hentian kecemasan,Output berhenti kecemasan IO ditutup pada penerima,Semua fungsi roda tangan dipulihkan。
②Paparan skrin:

③Butang tersuai:
4Butang tersuai,Setiap butang sepadan dengan titik output IO pada penerima,Sambung ke sistem melalui IO-LINK。Secara amnya, butang ~ ditetapkan sebagai butang berkelajuan tinggi。
④Suis pemilihan paksi:
Menukar suis pemilihan paksi boleh menukar paksi bergerak yang dikawal oleh roda tangan。
⑤Butang pintasan:
Tekan butang pintasan +,Mesin bergerak ke hadapan,Tekan butang pintasan -,Mesin bergerak ke arah negatif,Boleh menggantikan roda tangan untuk menggerakkan mesin。
⑥Butang dayakan:
Tekan dan tahan sama ada butang daya pada kedua-dua sisi,Ia berkesan hanya dengan menggoncang pengekod nadi。 Dan 2 set output IO yang didayakan pada penerima dihidupkan,Lepaskan butang Enable,Dayakan pemotongan output io。
⑦Suis pembesaran:
Menukar suis pembesaran boleh menukar pembesaran yang dikawal oleh roda tangan.。
⑧Pengekod nadi:
Tekan dan tahan butang Enable,Pengekod nadi goncang,Hantar isyarat nadi,Kawal pergerakan aci mesin。
⑨Suis kuasa:
Butang permulaan roda tangan。



Langkah pemasangan produk:
1.Pasang penerima di kabinet elektrik melalui snap-on di belakang,Atau memasangnya di kabinet elektrik melalui lubang skru di empat sudut penerima.。
1.Pasang penerima di kabinet elektrik melalui snap-on di belakang,Atau memasangnya di kabinet elektrik melalui lubang skru di empat sudut penerima.。
2.Rujuk rajah pendawaian penerima kami,Bandingkan peralatan di tempat anda,Sambungkan peranti melalui kabel dan penerima。
3.Selepas penerima diperbaiki,Antena yang dilengkapi dengan penerima mesti dihubungkan,Dan pasang hujung luar antena atau letakkan di luar kabinet elektrik,Adalah disyorkan untuk meletakkan isyarat di bahagian atas kabinet elektrik.,Ia tidak dibenarkan melepaskan antena,Atau letakkan antena di dalam kabinet elektrik,Ia boleh menyebabkan isyarat tidak dapat digunakan。
4.Akhirnya hidupkan suis kuasa tangan,Anda boleh mengendalikan mesin kawalan jauh tangan。
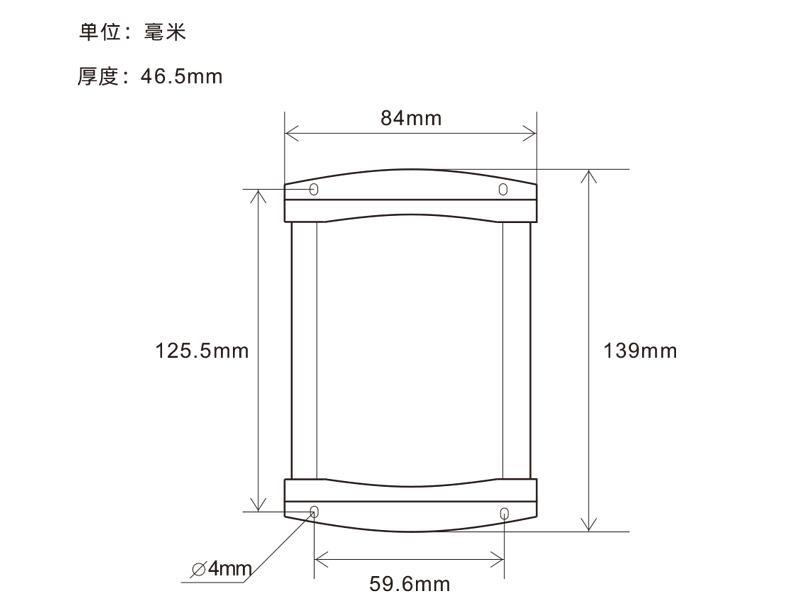
Saiz pemasangan penerima:
Rajah rujukan pendawaian penerima:


1.Sila pada suhu dan tekanan bilik,Digunakan dalam persekitaran kering,Memanjangkan hayat perkhidmatan;
2.Tolong elakkan basah dalam hujan、Digunakan dalam persekitaran yang tidak normal seperti lepuh,Memanjangkan hayat perkhidmatan;
3.Sila simpan tangan tangan bersih,Memanjangkan hayat perkhidmatan;
4.Tolong elakkan memerah、Jatuh、Bumping, dll.,Mencegah aksesori ketepatan di dalam tangan dari kerosakan atau kesilapan ketepatan;
5.Tidak lama digunakan,Sila simpan roda tangan di tempat yang bersih dan selamat;
6.Perhatikan kelembapan-bukti dan kejutan semasa penyimpanan dan pengangkutan。

1.Sila baca arahan untuk digunakan secara terperinci sebelum digunakan,Kakitangan bukan profesional dilarang;
2.Sila cas dalam masa apabila bateri terlalu rendah,Elakkan kesilapan yang disebabkan oleh kuasa yang tidak mencukupi, menyebabkan roda tangan tidak dapat beroperasi;
3.Sekiranya pembaikan diperlukan,Sila hubungi pengeluar,Sekiranya kerosakan yang disebabkan oleh pembaikan diri,Pengilang tidak akan memberikan jaminan。




