
Wire Saw Machine Pemotongan Automatik Kawalan Jauh Tanpa Wayar
Kawalan Jauh Tanpa Wayar Pemotongan Automatik Dh12S-P6s Kawat Automatik
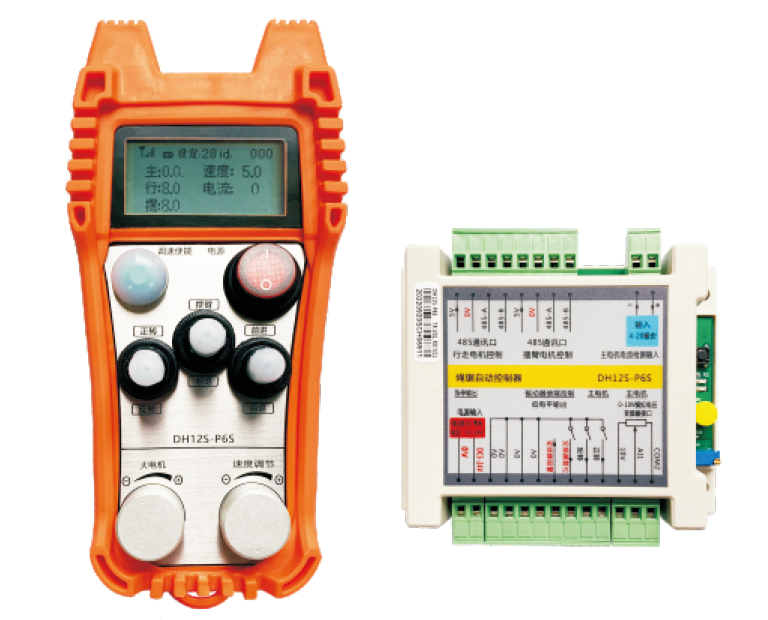
Penerangan


model:Peralatan penyesuai DH12S-P6S:Mesin gergaji sawit/bilah sawah


Catatan:Tiga jenis antena boleh dipilih,Antena cawan sedutan lalai adalah standard


Kelajuan motor utama:Tuan rumah:0-50
Kelajuan motor perjalanan:Ok:0-50
Had kelajuan maksimum pemotongan motor perjalanan automatik:kelajuan:0-30(Parameter boleh laras)
Semasa pemotongan automatik menetapkan semasa:Sediakan:28(Parameter boleh laras)
Kelajuan Motor Lengan Swing:meletakkan:0-50

Tekanan rendah:Bateri kawalan jauh terlalu rendah,Sila ganti bateri

Jatuh dari Internet:Gangguan isyarat tanpa wayar,Sila periksa bekalan kuasa penerima,Kuasa lagi,Mulakan semula kawalan jauh

1、Kawalan jauh dihidupkan
Penerima dikuasakan,Lampu kuasa D2 pada penerima selalu dihidupkan,Lampu isyarat D1 mula berkelip;Dua bateri No. 5 dipasang pada kawalan jauh,Hidupkan suis kuasa,Paparan paparan kelajuan motor,Ini bermaksud permulaan berjaya。
2、Peraturan motor dan kelajuan utama
Tekan dan tahan "Kawalan Kelajuan Dayakan",Hidupkan suis "Forward/Reverse" ke hadapan,Motor utama penerima berputar ke hadapan dan menghidupkan;
Tekan dan tahan "Kawalan Kelajuan Dayakan",Hidupkan suis "Forward/Reverse" ke hadapan,Motor utama penerima berputar ke hadapan dan menghidupkan;
Tekan dan tahan "Kawalan Kelajuan Dayakan",Hidupkan suis "Forward/Reverse" ke Reverse,Motor utama penerima membalikkan dan menghidupkan;
Hanya gerakkan suis ke tengah atau terbalik,Motor utama berhenti segera,Tidak perlu menekan kawalan kelajuan untuk membolehkan;
Hidupkan tombol "Motor Besar",Voltan peraturan kelajuan penyongsang motor utama penerima boleh diselaraskan 0-10V;
3、Perjalanan motor
3、Perjalanan motor
Tekan dan tahan "Kawalan Kelajuan Dayakan",Gerakkan suis "ke hadapan/terbalik" ke hadapan atau ke belakang,Motor berjalan akan bergerak pada kelajuan tinggi 50;
4、Motor lengan swing dan peraturan kelajuan
Hidupkan suis "Swing Arm/Reverse" ke lengan swing atau terbalik,Motor lengan ayunan penerima bermula;Kemudian putar tombol "pelarasan kelajuan",Kelajuan motor lengan swing boleh diselaraskan;
Tekan dan tahan "Kawalan Kelajuan Dayakan",Kemudian flip suis "lengan swing/terbalik",Motor lengan ayunan akan bergerak pada kelajuan tinggi 50;
5、Pelarasan had laju motor perjalanan
Tekan dan tahan butang "Kelajuan Aktifkan",Hidupkan "pelarasan kelajuan" untuk menyesuaikan had kelajuan maksimum motor perjalanan semasa pemotongan automatik.;
6、Pemotongan automatik
langkah pertama,Mulakan motor utama;Langkah 2,Laraskan had kelajuan maksimum motor perjalanan;Langkah 3,Hidupkan suis "Forward/Reverse" untuk bergerak ke hadapan atau ke belakang,Masukkan mod pemotongan automatik;
7、Tetapan parameter (pengguna dilarang mengubahnya secara peribadi)
Masukkan menu parameter:Dalam mod manual,Apabila kelajuan motor utama ialah 0,Suis ke hadapan/terbalik dibengkokkan 3 kali berturut -turut,Kemudian memecahkannya 3 kali berturut -turut,Masukkan menu parameter;
Keluar dari menu Parameter:Halaman Tombol Pelarasan Kelajuan Beralih,Pilih untuk menyimpan atau tidak menyimpan,Sahkan dengan menekan butang Enable;
Arus dinilai:Nilai maksimum arus motor utama,Unit ampere;
Parameter Peraturan Kelajuan:Parameter kawalan pemotongan automatik,Lalai 800,Unit Millisecond,Pengubahsuaian dilarang;
Parameter penurunan:Apabila nilai perubahan semasa pemotongan melebihi nilai ini,Mula menurun dengan cepat,Unit ampere;
Pecutan A1:Apabila arus pemotongan lebih rendah daripada arus pemotongan set,Nilai kelajuan meningkat dengan setiap pecutan motor berjalan;
Penurunan A2: Apabila arus pemotongan lebih tinggi daripada arus pemotongan set,Nilai kelajuan dikurangkan dengan setiap penurunan motor berjalan;
Semasa lengan swing:nilai lalai,Pengubahsuaian dilarang;
berhenti masa:Selepas penutupan kerana beban semasa dalam mod automatik,Periksa arus lagi selepas tempoh masa,Sekiranya ia kurang daripada arus yang ditetapkan,Memulakan motor berjalan secara automatik;Unit kedua,nilai lalai,Pengubahsuaian dilarang;
berhenti masa:Selepas penutupan kerana beban semasa dalam mod automatik,Periksa arus lagi selepas tempoh masa,Sekiranya ia kurang daripada arus yang ditetapkan,Memulakan motor berjalan secara automatik;Unit kedua,nilai lalai,Pengubahsuaian dilarang;
Arus maksimum:Range semasa maklum balas motor utama,Unit ampere;
Tuan rumah maksimum:Kawalan Jauh Kawalan Paparan Kelajuan Utama Utama;
Berjalan maksimum:Parameter tidak sah;
Had kelajuan mengimbangi:Apabila memotong secara automatik,Paparan Kawalan Jauh Berjalan Motor Kelajuan Had = 50% Parameter ini;
Tambah sensitiviti:Apabila arus maklum balas motor utama meningkat,Setiap kali nilai meningkat melebihi nilai ini,Percubaan Motor Perjalanan;
Mengurangkan kepekaan:Apabila arus maklum balas motor utama berkurangan,Setiap kali nilai berkurangan lebih daripada nilai ini,Perjalanan Motor Receleration;
Sensitiviti mengimbangi:Peningkatan Offset untuk Parameter Kepekaan Plus dan Tolak;
Tetapkan semasa:Pemotongan automatik,Ambang maklum balas motor utama semasa,melebihi nilai ini,Motor berjalan mula melambatkan;di bawah nilai ini,Motor berjalan mula mempercepatkan;Unit ampere;
Tetapkan semasa:Pemotongan automatik,Ambang maklum balas motor utama semasa,melebihi nilai ini,Motor berjalan mula melambatkan;di bawah nilai ini,Motor berjalan mula mempercepatkan;Unit ampere;
Keluar kosong:Apabila mod automatik bermula,Sekiranya arus maklum balas motor utama kurang daripada nilai ini,berada dalam mod pemalasan,lebih besar daripada nilai ini,kemudian keluar dari mod pemalasan,Masukkan mod pemotong,Unit ampere;
Arus tanpa beban:Apabila mod automatik bermula,Sekiranya arus maklum balas motor utama kurang daripada nilai ini,berada dalam mod tanpa beban,lebih besar daripada nilai ini,kemudian keluar dari mod tidak beban,Masukkan mod pemotong,Unit ampere;
Kelajuan lengan ayunan:Kelajuan permulaan motor lengan swing;
mod pemotongan:Tukar antara bilah saw dan dawai melihat mod,Selepas beralih, parameter juga akan beralih dengan sewajarnya.;Dalam mod saw bilah,Motor lengan ayunan ditambah ke paparan kawalan jauh,Mod gergaji wayar tidak mempunyai motor lengan swing.;
Masa yang dihancurkan:Apabila arus maklum balas motor utama melebihi arus berhenti,Akan terus mengesan maklum balas semasa,Masa debounce adalah tempoh pengesanan berterusan ini.,melebihi masa ini,Mengesan bahawa arus motor utama masih melebihi arus berhenti,BerjalanMotor akan berhenti;Jika tidak, motor berjalan akan terus maju;
Berhenti semasa:Arus maklum balas motor utama melebihi nilai ini,Motor perjalanan akan berhenti;Unit ampere;
Offset Default:Nilai awal had kelajuan motor berjalan apabila kawalan jauh dihidupkan = 50% dari nilai ini;
![]()
| Bekalan kuasa operasi penerima |
DC24V/1A (Bekalan Kuasa Bebas)
|
| Beban titik output penerima | AC0-250V/3A DC0-30V/5A |
| Voltan output peraturan kelajuan penerima | DC0-10V |

Hak akhir tafsiran produk ini milik Chengdu Core Synthetic Technology Co., Ltd.。




-500x650.png)
