
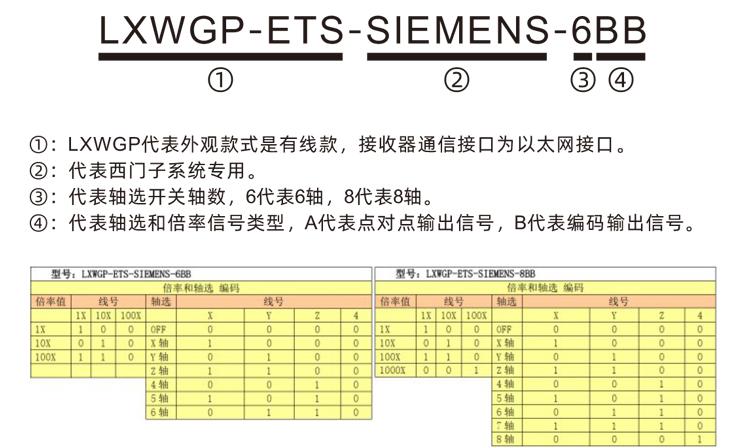
LXWGP-ETS-SIEMENS Handwheel Elektronik Berwayar
Penerangan


Roda tangan elektronik digunakan untuk panduan manual alatan mesin CNC、kedudukan、Operasi mogok。Model roda tangan elektronik ini ialah roda tangan elektronik berwayar Siemens dengan paparan sebenar.,Roda tangan disambungkan ke antara muka X130 sistem Siemens melalui kabel rangkaian.,Baca koordinat sistem dan paparkannya ke paparan LCD roda tangan melalui komunikasi protokol S7.,Dan pemilihan paksi sistem kawalan roda tangan boleh dibuat melalui komunikasi.、pembesaran、Butang dan isyarat lain。

1.Disambungkan menggunakan kabel palam penerbangan 6 teras,Panjang kabel roda tangan 10 meter。
2.Skrin roda tangan boleh memaparkan koordinat bahan kerja sistem、Koordinat mekanikal、Kelajuan suapan、Pemilihan paksi、Maklumat seperti pembesaran。
3.Sokong butang berhenti kecemasan,Menukar output isyarat IO,Hentian kecemasan penutupan roda tangan masih berkesan。
4.Menyokong 6 butang tersuai,Menukar isyarat IO,Boleh mengeluarkan isyarat kepada sistem melalui pendawaian IO atau komunikasi。
5.Menyokong kawalan 6 atau 8 paksi,Menukar isyarat IO,Boleh mengeluarkan isyarat kepada sistem melalui pendawaian IO atau komunikasi。
6.Menyokong 3 atau 4 tahap kawalan pembesaran,Menukar isyarat IO,Boleh mengeluarkan isyarat kepada sistem melalui pendawaian IO atau komunikasi。
7.Sokongan Pulse Encoder,100Pulse/giliran,Isyarat boleh dikeluarkan kepada sistem melalui pendawaian nadi AB.。
8.Sokongan Protokol Siemens S7,Sokong Siemens 828D、840DSL、SATU dan sistem model lain。

| Voltan bekalan kuasa kerja roda tangan | DC24V/1A |
| Voltan bekalan kuasa penerima | DC24V/1A |
| Julat beban output IO penerima |
DC24V
|
| Panjang kabel hujung roda tangan |
10m
|
| Panjang kabel hujung penerima |
1m
|
| Panjang kabel rangkaian hujung penerima |
3m
|
| Suhu operasi |
-25℃<X<55℃
|
| Ketinggian anti-jatuh |
1m
|
| Sesuaikan bilangan butang | 6dulu |
| Saiz produk | 233*90.7*77.4(Mm) |


Komen:
①Butang berhenti kecemasan:
Tekan butang berhenti kecemasan,Dua kumpulan output IO Stop kecemasan pada penerima terputus,Dan semua fungsi roda tangan tidak sah。
Selepas melepaskan hentian kecemasan,Output berhenti kecemasan IO ditutup pada penerima,Semua fungsi roda tangan dipulihkan。
②Paparan skrin:
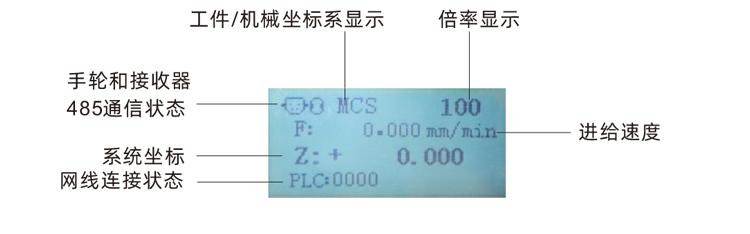
PLC:0000Ini bermakna kabel rangkaian tidak disambungkan,PLC:1010Ini bermakna kabel rangkaian dan sistem PLC berjaya disambungkan.,
PLC:1110Menunjukkan bahawa roda tangan berjaya menulis data sistem.,PLC:0001Menunjukkan sambungan yang berjaya ke komputer。
③Butang tersuai:
6Butang tersuai,Setiap butang sepadan dengan titik output IO pada penerima,Juga disambungkan kepada sistem melalui komunikasi。
④Suis pemilihan paksi:
Menukar suis pemilihan paksi boleh menukar paksi bergerak yang dikawal oleh roda tangan。
⑤Butang dayakan:
Tekan dan tahan sama ada butang daya pada kedua-dua sisi,Ia berkesan hanya dengan menggoncang pengekod nadi。 Dan 2 set output IO yang didayakan pada penerima dihidupkan,Lepaskan butang Enable,Dayakan pemotongan output io。
⑥Suis pembesaran:
Menukar suis pembesaran boleh menukar pembesaran yang dikawal oleh roda tangan.。
⑦Pengekod nadi:
Tekan dan tahan butang Enable,Pengekod nadi goncang,Hantar isyarat nadi,Kawal pergerakan aci mesin。
⑧Kabel roda tangan:
Kabel menyambungkan roda tangan dan penerima,palam penerbangan,Untuk bekalan kuasa dan komunikasi roda tangan。



6.1Langkah pemasangan produk
1.Pasang penerima dalam kabinet elektrik melalui lubang skru di empat penjuru.。
2.Rujuk rajah pendawaian penerima kami,Bandingkan peralatan di tempat anda,Sambungkan peranti melalui kabel dan penerima
menyambung,Gunakan kabel rangkaian untuk menyambungkan penerima ke antara muka X130 sistem。
3.Selepas penerima diperbaiki,Pasang tapak palam penerbangan ke dalam bukaan roda tangan pada panel,Pangkalan lain
Jalur terminal dipalamkan ke antara muka roda tangan pada penerima.。Kemudian masukkan palam penerbangan kabel hujung roda tangan ke dalam pangkalan,Ketatkan
lekapan。
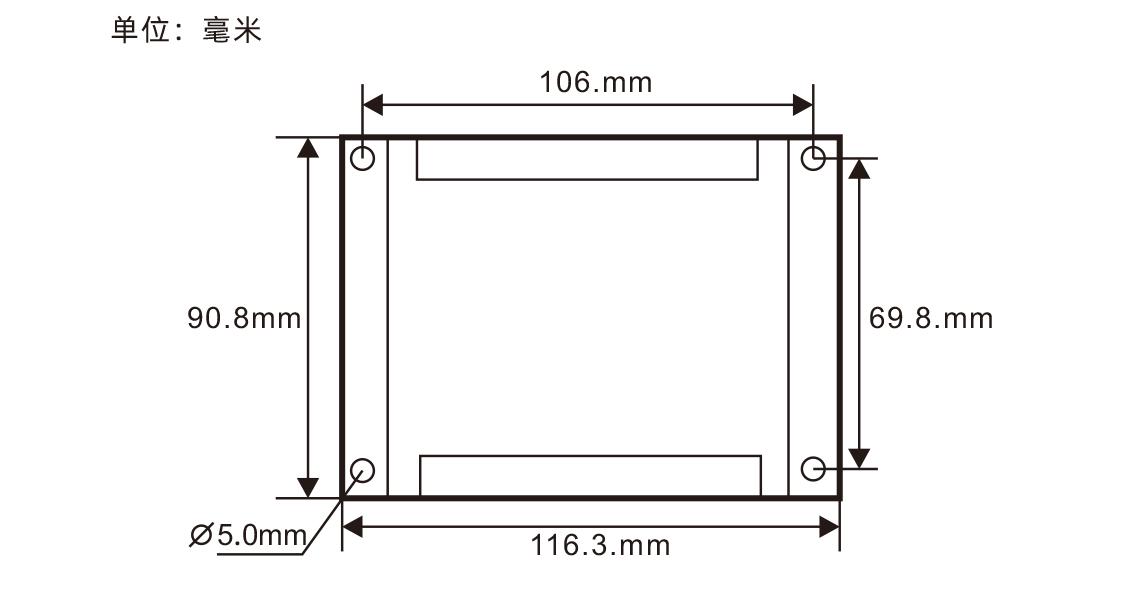
6.2Saiz pemasangan penerima
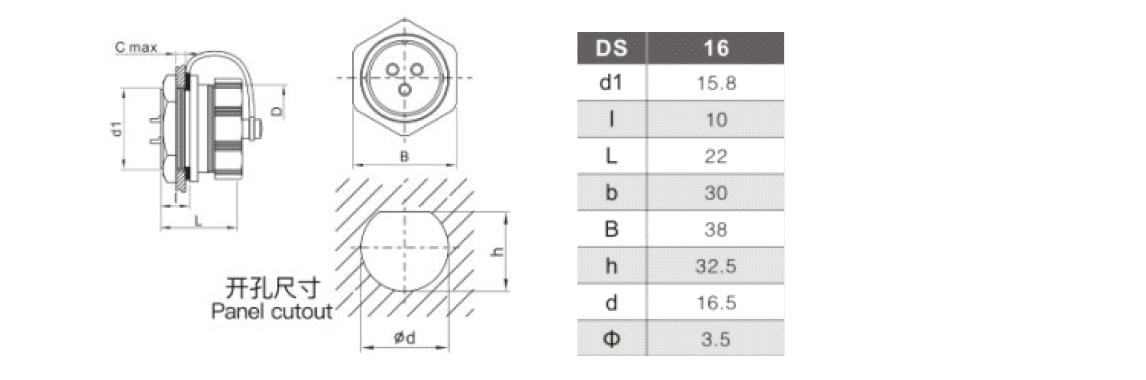
6.3Dimensi pemasangan plag penerbangan
6.4Rajah rujukan pendawaian penerima

6.2Saiz pemasangan penerima
6.3Dimensi pemasangan plag penerbangan
6.4Rajah rujukan pendawaian penerima

1.Penerima dikuasakan,Lampu operasi penerima dihidupkan,Sambungkan penerima ke komputer menggunakan kabel rangkaian,Tetapkan alamat IP tetap untuk komputer anda,Gunakan perisian alat konfigurasi rangkaian untuk menetapkan parameter rangkaian untuk fungsi roda tangan,Tetapan khusus
Untuk kaedah, sila rujuk "Arahan Penggunaan Roda Tangan Berwayar LXWGP-ETS"。
2.Selepas persediaan penerima selesai,Sistem ini memerlukan pengaturcaraan program PLC,Untuk butiran, sila rujuk kepada "Kaedah Tetapan LXWGP-ETS untuk Sistem CNC Siemens Berbeza" dan maklumat rutin program PLC。
3.Selepas tetapan di atas selesai,Bawa penerima ke kabinet elektrik mesin dan pasangkannya,Cabut palam kabel rangkaian daripada komputer dan palamkannya ke antara muka X130 sistem,Pasangkan wayar kuasa penerima dan nadi。
4.Mesin itu dikuasakan,Penerima dikuasakan,Lampu operasi penerima dihidupkan,Hidupkan suis kuasa roda tangan,But skrin roda tangan,Paparan skrin PLC:1010,Menunjukkan komunikasi yang berjaya antara roda tangan dan sistem.。
5.Pilih pemilihan paksi:Suis suis pemilihan gandar,Pilih paksi yang ingin anda kendalikan。
6.Pilih pengganda:Tukar suis pembesaran,Pilih pengganda yang anda perlukan。
7.Gerakkan paksi:Tekan dan tahan butang Enable,Pilih paksi dan suis,Pilih suis pengganda,Kemudian putar encoder nadi,Putar paksi pergerakan ke hadapan mengikut arah jam,Hidupkan paksi pergerakan negatif berlawanan arah jam。
8.Tekan dan tahan butang tersuai,Butang yang sepadan dengan output io penerima dihidupkan,Output Butang Siaran Tutup。
9.Tekan butang berhenti kecemasan,Penerima memutuskan sambungan output IO stop kecemasan,Fungsi Handwheel gagal,Lepaskan butang berhenti kecemasan,Output berhenti kecemasan IO ditutup,Pemulihan fungsi tangan。


| Keadaan kesalahan | Sebab yang mungkin |
Kaedah penyelesaian masalah
|
|
|
Kaedah penyelesaian masalah
|
1.Sama ada kabel penerbangan antara roda tangan dan penerima disambungkan dengan betul dan boleh dipercayai
2.Adakah voltan kuasa penerima mencukupi?
3.Kegagalan tangan
|
1.Periksa sambungan kabel penerbangan antara roda tangan dan penerima
2.Periksa kuasa input penerima
3.Hubungi pengeluar untuk kembali ke kilang untuk penyelenggaraan
|
|
| Tiada tindak balas semasa mengendalikan roda tangan |
1.Adakah kabel rangkaian antara penerima dan sistem disambungkan?
2.Adakah program PLC sistem ditulis dengan baik?
3.Adakah konfigurasi penerima ditetapkan dengan betul?
4.Adakah ikon komunikasi 485 yang dipaparkan pada paparan roda tangan gagal?
5.Semasa mengendalikan roda tangan,Anda perlu menekan dan menahan butang daya pada kedua-dua belah
6.Adakah butang berhenti kecemasan dilepaskan?
|
1.Periksa sama ada penerima dan port rangkaian sistem X130 disambungkan dengan kabel rangkaian
2.Semak dan sahkan sama ada PLC sistem ditulis mengikut bahan rujukan yang kami sediakan.
3.Semak sama ada penerima merujuk kepada maklumat kami dan perisian alat yang disediakan,Tetapkan parameter rangkaian dan alamat DB penerima dengan betul, dsb.
4.Periksa antara roda tangan dan penerima
6soket hijau teras,Dua daripada talian komunikasi:485-A dan 485-B,Adakah ia disambungkan dengan betul dan selamat?,Adakah terdapat sebarang pemutus litar?
|
|
|
Selepas penerima dikuasakan,Lampu kerja pada penerima tidak menyala
|
1.Kelainan bekalan kuasa
2.Kesalahan pendawaian kuasa
3.Kegagalan penerima
|
1.Periksa sama ada bekalan kuasa mempunyai voltan,
Adakah voltan memenuhi syarat
2.Periksa sama ada kutub positif dan negatif bekalan kuasa disambungkan secara terbalik
3.Kembali ke penyelenggaraan kilang
|

1.Sila pada suhu dan tekanan bilik,Digunakan dalam persekitaran kering,Memanjangkan hayat perkhidmatan。
2.Tolong elakkan basah dalam hujan、Digunakan dalam persekitaran yang tidak normal seperti lepuh,Memanjangkan hayat perkhidmatan。
3.Sila simpan tangan tangan bersih,Memanjangkan hayat perkhidmatan。
4.Tolong elakkan memerah、Jatuh、Bumping, dll.,Mencegah aksesori ketepatan di dalam tangan dari kerosakan atau kesilapan ketepatan。
5.Tidak lama digunakan,Sila simpan roda tangan di tempat yang bersih dan selamat。
6.Perhatikan kelembapan-bukti dan kejutan semasa penyimpanan dan pengangkutan。

1.Sila baca arahan untuk digunakan secara terperinci sebelum digunakan,Kakitangan bukan profesional dilarang。
2.Selepas sebarang situasi tidak normal berlaku pada roda tangan,Sila berhenti menggunakannya dengan segera,dan menyelesaikan masalah,Sebelum menyelesaikan masalah,Dilarang menggunakan handwheel yang rosak lagi,Elakkan kemalangan keselamatan akibat kegagalan roda tangan yang tidak diketahui;
3.Sekiranya pembaikan diperlukan,Sila hubungi pengeluar,Sekiranya kerosakan yang disebabkan oleh pembaikan diri,Pengilang tidak akan memberikan jaminan。


.png)


