
Crawler ကြိုးအတွက်အလိုအလျောက်ဖြတ်တောက်ခြင်းကြိုးမဲ့ဝေးလံခေါင်သီ
DH12S-2R-LD-485 တွားမြင်နေသည့်ကြိုးသည်အဝေးထိန်းခလုတ်ဖြတ်တောက်ခြင်းကိုမြင်ခဲ့သည်
ဖေါ်ပြချက်


Crawler ဝါယာကြိုးအတွက်အလိုအလျောက်ဖြတ်တောက်ခြင်း Crawler ဝါယာကြိုးအတွက်သင့်တော်သောအဝေးသင်မြင်ကွင်းများသည်ဖြတ်စက်များကိုမြင်တွေ့ရသည်,လက်ဝဲနှင့်မှန်ကန်သော crawler အကြွေးကူးသူများကိုထိန်းချုပ်ရန် 485modbus rtu protocol ကိုသုံးပါ,အဖြစ်ကြီးမားသောမော်တာကြိမ်နှုန်းပြောင်းလဲခြင်းမြန်နှုန်းထိန်းချုပ်မှုစတင်ခြင်းနှင့်ရှေ့တန်း - ဘယ်ဘက် - ဘယ်ဘက်-right ည့်လမ်းညွှန် Controller。နှင့်ကြီးမားသောမော်တာ inverter ၏ operating လက်ရှိကို 485- Modbus RTU protocol မှတဆင့်ဖတ်နိုင်ပါသည်,ကြီးမားသောမော်တာများ၏လက်ရှိ၏လက်ရှိ၏ခွဲခြမ်းစိတ်ဖြာခြင်းနှင့်နှိုင်းယှဉ်,လက်ဝဲနှင့်ညာဘက်လမ်းကြောင်းအမြန်နှုန်းကိုအလိုအလျောက်ညှိပါ,အလိုအလျောက်ဖြတ်တောက်ခြင်း function ကိုအကောင်အထည်ဖော်。

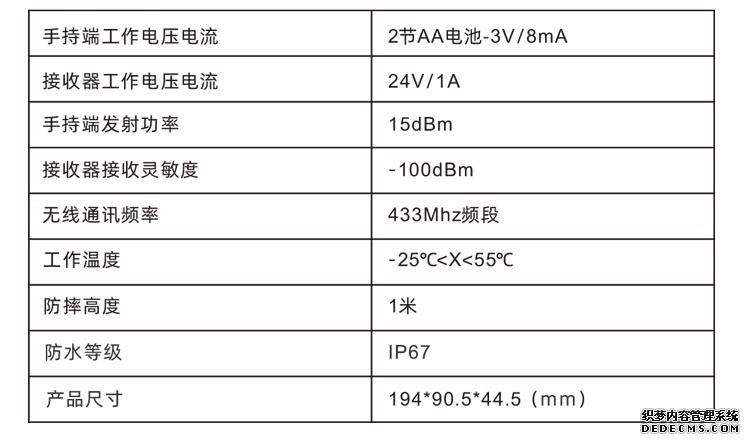
1.433mhz ကြိုးမဲ့ဆက်သွယ်ရေးနည်းပညာကိုချမှတ်ပါ,ကြိုးမဲ့စစ်ဆင်ရေးအကွာအဝေးမီတာ 100。
2.အလိုအလျောက်အကြိမ်ရေကိုလက်ခံခြင်း function ကိုချမှတ်ပါ,တစ်ချိန်တည်းမှာကြိုးမဲ့အဝေးထိန်းထိန်းသိမ်းထားမှု 32 ခုကိုသုံးပါ,တစ် ဦး ချင်းစီကတခြားအပေါ်အဘယ်သူမျှမအကျိုးသက်ရောက်မှု。
3.485-Modbus RTU protocol နှင့်အတူကြိမ်နှုန်း converts အားလုံးထောက်ပံ့သည်,လက်ရှိ Adited Inverter အမှတ်တံဆိပ်များတွင်ပါဝင်သည်: ရှန်ဟိုင်း Xielin、ဖူဂျီ、ဟွန်ယန်、zhongchen、အဆင်တန်、yaskawa tatsu。သင့်တွင်အမှတ်တံဆိပ်မရှိပါက၎င်းကိုစိတ်ကြိုက်ပြုလုပ်ရန်ကျွန်ုပ်တို့အားဆက်သွယ်ပါ။。
4.ကြီးမားသောမော်တာ Inverters စတင်ခြင်း、မြန်နှုန်းညှိနှိုင်းမှု、လက်ရှိဖတ်ပါ。
5.ဘယ်ဘက်နှင့်ညာ crawler inverters ၏မြန်နှုန်းစည်းမျဉ်းကိုထောက်ပံ့သည်、စတင်တည်ထောင်သည်、ရှေ့, နောက်ကျော, ဘယ်ဘက်နှင့်ညာထိန်းချုပ်မှု。
6.လက်ဝဲနှင့်ညာ crawler inverters ၏ linear သွေဖည်ဆုံးမခြင်းကိုထောက်ပံ့သည်,စက်ကိုဖြောင့်တန်းတွင်ပြေးနေပါ。
7.Wire Saw ၏အလိုအလျှောက်ဖြတ်တောက်ခြင်း function ကိုထောက်ပံ့သည်,ကြီးမားသောမော်တာလက်ရှိသတင်းအချက်အလက်အရသိရသည်,လက်ဝဲနှင့်ညာဘက်လမ်းကြောင်းအမြန်နှုန်းကိုအလိုအလျောက်ညှိပါ。
8.၎င်းသည်မော်တာ၏ရပ်တန့်မှုကိုထိန်းချုပ်ရန်တိုက်ရိုက် IO output ကိုထောက်ပံ့သည်,analog analog voltage output ကိုထိန်းချုပ်သည်。



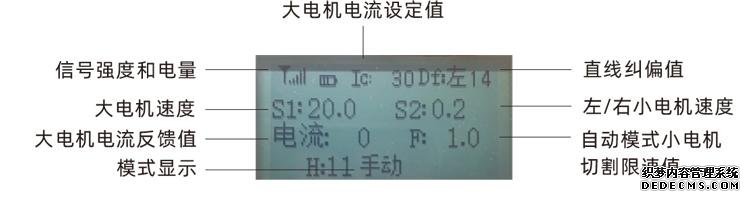
မှတ်ချက်များ: ①မျက်နှာပြင်ပြသ:
②mode switch ကို:
2-speed switch ကိုသုံးပါ,သင်အလိုအလျောက်နှင့်လက်စွဲ modes များအကြားပြောင်းနိုင်သည်,မျက်နှာပြင်ပေါ်ရှိသက်ဆိုင်ရာ mode switch တစ်ခုရှိလိမ့်မည်。
③ Enable Enable:
ပေါင်းစပ်ခလုတ်များ,အချို့သောစစ်ဆင်ရေးများသည်သင့်အားလည်ပတ်ရန်အတွက် Enable ခလုတ်ကို နှိပ်. ဖိထားပါရန်လိုအပ်သည်,ခလုတ်တစ်ခုစီအတွက်ညွှန်ကြားချက်များကိုကြည့်ပါ。
④ကြီးမားသောမော်တာခလုတ်:
3-speed reset switch ကိုသုံးပါ,ဒီ switch ကိုဖွင့်ပါ,ကြီးမားသောမော်တာများ၏ရှေ့ဆက်နှင့်ပြောင်းပြန်လည်ပတ်နိုင်ပါတယ်,သွားခွင့်ပြုပြီးနောက်ပြည်နယ်ဆက်လက်တည်ရှိလိမ့်မည်,မျက်နှာပြင်ပေါ်တွင်သက်ဆိုင်ရာမျက်နှာပြင်ရှိလိမ့်မည်,arrow သည်အပြုသဘောလည်ပတ်မှုကိုဖော်ပြသည်,arrow ပြောင်းပြန်များဖော်ပြသည်。
⑤အသေးစားမော်တာရှေ့သို့ / ပြောင်းပြန် switch ကိုနှိပ်ပါ:
3 မြန်နှုန်း Self-Locking Switch ကိုချမှတ်ပါ,ဒီ switch ကိုဖွင့်ပါ,သေးငယ်တဲ့မော်တာ၏ကြိုတင်နှင့်နောက်ပြန်ထိန်းချုပ်နိုင်ပါတယ်,မျက်နှာပြင်ပေါ်တွင်သက်ဆိုင်ရာမျက်နှာပြင်ရှိလိမ့်မည်,arrow သည်တိုးတက်မှုကိုဖော်ပြသည်,arrov နောက်ပြန်ညွှန်ပြ。
⑥ Remote Control Power Switch:
0.2 ယူနစ်ခန့်အားဖြင့်ကြီးမားသောမော်တာပြောင်းလဲမှုများ၏မြန်နှုန်းတန်ဖိုး, Multi-turn encoder knob ကိုသုံးပါ,အဖုလှည့်,ကြီးမားသောမော်တာမြန်နှုန်း s1 ကိုချိန်ညှိပါ。လည်ပတ်နှုန်း 1 box ကို, လျင်မြန်စွာလည်ပတ်ခြင်းသည်ကြီးမားသောမော်တာမြန်နှုန်းကိုလျင်မြန်စွာပြုပြင်နိုင်သည်。
⑦အသေးစားမော်တာဖွင့်ခလုတ်ကိုနှိပ်ပါ:
3-speed reset switch ကိုသုံးပါ,လက်စွဲစနစ်ဖြင့်ဤ switch ကိုဖွင့်ပါ,သေးငယ်တဲ့မော်တာ၏ဘယ်ဘက်နှင့်ညာဘက်အလှည့်ကိုထိန်းချုပ်နိုင်ပါတယ်,အပန်းဖြေပြီးနောက်အဝေးထိန်းကဒီလုပ်ဆောင်ချက်ကိုအလိုအလျောက်ရပ်တန့်သွားလိမ့်မယ်。 ကြိုတင်ပြည်နယ်တွင်,ဒီ switch ကိုဖွင့်ပါ,မျက်နှာပြင်ပေါ်တွင်သက်ဆိုင်ရာမျက်နှာပြင်ရှိလိမ့်မည်,←မူများကဘယ်ဘက်အလှည့်ကိုညွှန်ပြသည်,→ arrow ဆိုသည်မှာညာဘက်လှည့်。 နောက်ပြန်ပြည်နယ်၌တည်၏,ဒီ switch ကိုဖွင့်ပါ,မျက်နှာပြင်ပေါ်တွင်သက်ဆိုင်ရာမျက်နှာပြင်ရှိလိမ့်မည်,←မူများကဘယ်ဘက်အလှည့်ကိုညွှန်ပြသည်,→ arrow ဆိုသည်မှာညာဘက်လှည့်。 Enable ကို နှိပ်. ကိုင်ပါ,ထို့နောက် switch ကိုဖွင့်ပါ,On-site ကိုဖွင့် function ကိုလုပ်ဆောင်နိုင်ပါတယ်,ပိုမြန်လှည့်。
⑧ကြီးမားသောမော်တာမြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ :
0.2 ယူနစ်ခန့်အားဖြင့်ကြီးမားသောမော်တာပြောင်းလဲမှုများ၏မြန်နှုန်းတန်ဖိုး, Multi-turn encoder knob ကိုသုံးပါ,အဖုလှည့်,ကြီးမားသောမော်တာမြန်နှုန်း s1 ကိုချိန်ညှိပါ。လည်ပတ်နှုန်း 1 box ကို, လျင်မြန်စွာလည်ပတ်ခြင်းသည်ကြီးမားသောမော်တာမြန်နှုန်းကိုလျင်မြန်စွာပြုပြင်နိုင်သည်。
⑨အသေးစားမော်တာမြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ:
(ဖြောင့်သောလိုင်းပြင်ဆင်ခြင်း) Multi-turn encoder fatob ကိုသုံးပါ,manual mode မှာ,တစ် ဦး ချင်းစီအဖုလည်ပတ်မှုအတွက် box တစ်ခု,0.1 ယူနစ်ခန့်အားဖြင့်သေးငယ်တဲ့မော်တာပြောင်းလဲမှုများ၏မြန်နှုန်းတန်ဖိုး,အမြန်လည်ပတ်ခြင်းသည်အသေးစားမြန်နှုန်းတန်ဖိုးကိုလျင်မြန်စွာပြုပြင်နိုင်သည်。အလိုအလျောက် mode မှာ,Enable ခလုတ်ကိုနှိပ်ပါ,ထို့နောက်တစ်ခုချင်းစီကိုအချိန် 1 ပိတ်ပင်တားဆီးမှုလှည့်,အမြန်နှုန်းကန့်သတ်ချက်သည် 0.1 ယူနစ်အားဖြင့်မော်တာပြောင်းလဲမှုများကိုတန်ဖိုးထားသည်,အမြန်လည်ပတ်မှုသည်မော်တာအသေးစားများ၏မြန်နှုန်းကန့်သတ်ချက်ကိုလျင်မြန်စွာပြုပြင်နိုင်သည်。Enable ခလုတ်ကိုနှိပ်ပါ,ညာဘက်အဖုဖွင့်,linear ပြင်ဆင်ချက်မျက်နှာပြင်:ခရု:လက်ဝဲဘက်ဖြစ်သော,ဘူးသီးတစ်ယူနစ်လျှင် 1 ယူနစ်ကိုထည့်ပါ;ဘယ်ဘက်ဖလားကိုလှည့်ပါ,linear ပြင်ဆင်ချက်မျက်နှာပြင်:ခရု:မှန်သော,ဘူးသီးတစ်ယူနစ်လျှင် 1 ယူနစ်ကိုထည့်ပါ;တစ်ခုချင်းစီကိုသွေဖည်ဆုံးမခြင်းယူနစ်သည် Motor Speed Regulation AVI ဗို့အား 0.02V နှင့်သက်ဆိုင်သည်。



ကုန်ပစ္စည်းတပ်ဆင်ခြင်းအဆင့်များ
1.Back တွင် Snow-on မှတဆင့် COMPENTED တွင်လက်ခံသူကိုတပ်ဆင်ပါ,သို့မဟုတ်လက်ခံသူ၏ထောင့်လေးထောင့်ရှိဝက်အူတွင်းများမှတဆင့်လျှပ်စစ်ဓာတ်သန်ပြင်တွင်ထည့်သွင်းပါ။。
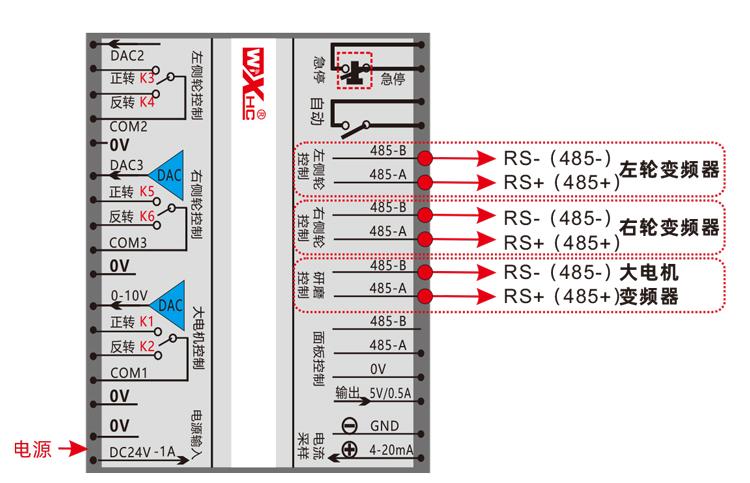
2.ကျွန်ုပ်တို့၏ receiver ဝါယာကြိုးပုံကိုကြည့်ပါ,သင်၏ On-site ကိုပစ္စည်းကိရိယာများကိုနှိုင်းယှဉ်ကြည့်ပါ,device ကိုဝါယာကြိုးများနှင့်လက်ခံသူများမှတဆင့်ချိတ်ဆက်ပါ。
3.လက်ခံပြီးနောက် fixed သည်,လက်ခံသူနှင့်တပ်ဆင်ထားသောအင်တင်နာကိုချိတ်ဆက်ရမည်,နှင့် antenna ၏အပြင်ဘက်အဆုံးကို install သို့မဟုတ် Electric Societ အပြင်ဘက်တွင်ထည့်ပါ,Signal ကို Symem Sleaster Societ ၏ထိပ်တွင်နေရာချရန်အကြံပြုသည်။,၎င်းကိုအင်တင်နာကိုချိတ်ဆက်ခွင့်မပြုပါ,သို့မဟုတ်လျှပ်စစ်ဝန်ကြီးအဖွဲ့အတွင်းရှိအင်တင်နာကိုထည့်ပါ,ညံ့ဖျင်းသောအချက်ပြခြင်းကိုအသုံးမပြုနိုင်ပါ。
4.နောက်ဆုံးတွင်ဘက်ထရီကိုအဝေးထိန်းထိန်းချုပ်မှုရှိသည့်ဘက်ထရီကိုတပ်ဆင်ပါ,ဘက်ထရီအဖုံးတင်းကျပ်,ထို့နောက်အဝေးထိန်း power switch ကိုဖွင့်ပါ,Remote Control display သည်ပုံမှန်အလုပ်လုပ်သော interface ကိုပြလိမ့်မည်,သင်ဝေးလံခေါင်သီထိန်းချုပ်မှုစစ်ဆင်ရေးလုပ်ဆောင်နိုင်ပါတယ်。
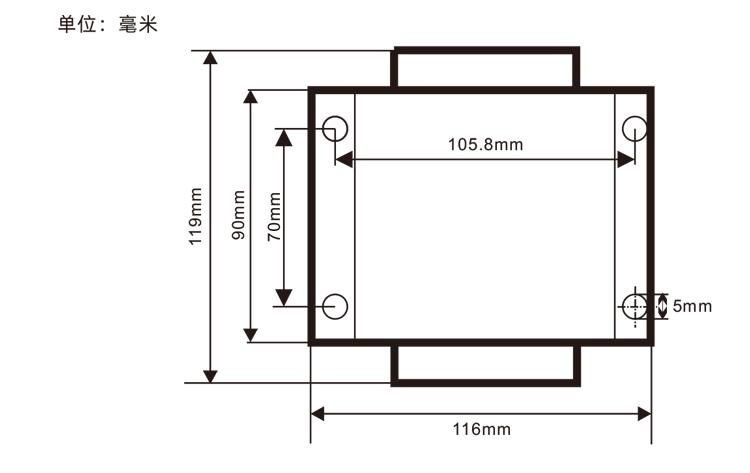
စာရင်းထည့်သွင်းအရွယ်အစား
လက်ခံသူဝါယာကြိုးရည်ညွှန်းပုံ

Remote Control Parameter ချိန်ညှိချက်များ
ဝေးလံခေါင်သီထိန်းချုပ်မှု၏နောက်ခံ parameter ကိုရိုက်ထည့်ရန်နည်းလမ်း:MODE switch ကို manual mode သို့ပြောင်းသည်,အသေးစားမော်တာ၏အမြန်နှုန်းကို 25 နှင့်ညှိသည်, သို့မဟုတ် 0、10、20、40、50,ကြီးမားသောမော်တာ၏ရှေ့သို့ switch ကို 3 ဆက်တိုက်အကြိမ်များအတွက်အထက်သို့လှည့်သည်,အောက်သို့သွားပါ;
စာမျက်နှာများကိုဖွင့်ရန် "အသေးစားမော်တာမြန်နှုန်းစည်းမျဉ်းစည်းကမ်းများ" ဖောင်းကိုသုံးပါ,place ကိုပြုပြင်ရန် Motor Speed Control Butb ကိုနှိပ်ပါ; ပြုပြင်မွမ်းမံပြီးနောက်,စာမျက်နှာကိုအဆုံးသို့လှည့်ပါ,Exit မှ Save ကိုရွေးချယ်ပါ,Menu မှထွက်ရန် Enable ခလုတ်ကိုနှိပ်ပါ;
အဆိုပါ parameters တွေကိုအောက်ပါအတိုင်းဖြစ်ကြသည်: အများဆုံးလက်ရှိ:ကြီးမားသောမော်တာလက်ရှိတုံ့ပြန်ချက်တန်ဖိုးအကွာအဝေး,ချိန်ညှိချက်များအကွာအဝေး 15-200a,ပုံမှန် 60;
မြန်နှုန်းညှိနှိုင်းမှု parameters တွေကို:အလိုအလျောက် mode သည်သေးငယ်သောမော်တာလျင်မြန်စွာနှင့်ဖြည်းဖြည်းချင်းအရှိန်မြှင့်သည်,ပိုမြန်သေးငယ်,200-1500 အကွာအဝေး setting ကို, 1000 ပျက်ကွက်;
မြန်နှုန်းလျှော့ချရေး parameters တွေကို:မော်တာမြန်နှုန်းပြောင်းလဲမှုကိုခွင့်ပြုသည့်အထက်ကန့်သတ်ချက်ကိုသတ်မှတ်ပါ,လက်ရှိအခြေအနေဤတန်ဖိုးကိုကျော်လွန်သောအခါ,နှေးကွေးပါလိမ့်မယ်。 သေးငယ်တဲ့,လက်ဝဲနှင့်ညာဘက်မော်တာများလျင်မြန်စွာနှေးကွေး,05-12 အထိ,ပုံမှန် 06;
Self-lock ကိုစတင်ပါ: အမြန်နှုန်း A1:ပိုကြီးတဲ့မော်တာမြန်နှုန်းပိုမြန်တိုးပွားလာသည်,00-06,ပုံမှန် 01;
မြန်နှုန်း A2 လျှော့ချ:ပိုကြီးတဲ့အမြန်နှုန်းကပိုမြန်လေလေလေ,00-06,ပုံမှန် 02;
မြန်နှုန်းစည်းမျဉ်းကိုဖွင့်ပါ:၎င်းကိုဖွင့်ရန်မော်တာ၏အမြန်နှုန်းကိုနှိပ်ရန်လိုအပ်ပါသလား။,00မဖွင့်ပါ,01စွမ်းဆောင်နိုင်စေ,ပုံမှန် 01;
ရှေ့သို့မော်တာ၏ရှေ့သို့နှင့်ပြောင်းပြန် switch သည်အလိုအလျောက်ဖြန့်ချိပြီးနောက်အလိုအလျောက်သော့ခတ်ထားရှိမည်ဖြစ်စေ,,00ဒါကိုမထားပါနဲ့,01သိုထား,ပုံမှန် 01;
အကြီးမားဆုံးလမ်းလျှောက်:အများဆုံးမော်တာမြန်နှုန်း,10-100 အကွာအဝေး,ပုံမှန် 50;
လက်ရှိဖြတ်တောက်ခြင်း:အများဆုံးဖြတ်တောက်ခြင်းလက်ရှိ,မျက်နှာပြင်သည် IC တန်ဖိုးကိုပြသသည်,15-160 အကွာအဝေး,30 ပုံမှန် 30,မျက်နှာပြင်သည်သက်ဆိုင်ရာ IC ကိုပြသသည်:30。ဤ parameter သည်အထက်ကန့်သတ်ချက် = အများဆုံးလက်ရှိ x80%;
ပုံမှန်မြန်နှုန်းကန့်သတ်ချက်:သေးငယ်တဲ့မော်တာအလိုအလျောက်ဖြတ်တောက်ခြင်းမြန်နှုန်း,00-100,ပုံမှန် 10,မျက်နှာပြင် f1.0 displays,ဤ parameter သည်အများဆုံးလမ်းလျှောက်ရန် 50 သတ်မှတ်သောအခါသာတိကျသည်。
ကြိုးမဲ့ရုပ်သံလိုင်း:ပုံမှန် 10,ဝေးလံခေါင်သီထိန်းချုပ်မှု signal ကိုမတည်မငြိမ်ဖြစ်တဲ့အခါ,သို့မဟုတ် site ကိုအပေါ် signal ကိုဝင်ရောက်စွက်ဖက်ရှိသည့်အခါ,ဒီ parameter သည်ပြုပြင်မွမ်းမံနိုင်ပါတယ်,ပြောင်းပါ,ဝင်ရောက်စွက်ဖက်ခြင်းကိုရှောင်ကြဉ်ပါ;
မြန်နှုန်းကန့်သတ်ကန့်သတ်:အသေးစားမော်တာအတွက်အနိမ့်ဆုံးအလိုအလျောက်ဖြတ်တောက်ခြင်းမြန်နှုန်းကန့်သတ်ချက်,00-200 အထိ,ပုံမှန် 60,သက်ဆိုင်ရာမျက်နှာပြင်ပြသထားတယ်;တန်ဖိုးရှိသောကန့်သတ် = မြန်နှုန်းကန့်သတ်ခြင်း× 0.1;
အကြီးဆုံးအိမ်ရှင်:ကြီးမားသောမော်တာအများဆုံးမြန်နှုန်း,10-100 အကွာအဝေး,ပုံမှန် 50;
MBUS ပစ္စည်းကိရိယာများ (လိုအပ်သည်):ကြီးမားသောမော်တာကြိမ်နှုန်း converter ကိုရွေးချယ်ခြင်း,Crange 00-03,03 ပုံမှန်;
00-ရှန်ဟိုင်း Xielin 01-Fuji
02-yingweiteng 03-Huichuan (zhongchen)、ရော်ဘင်)
SBUS ပစ္စည်းကိရိယာများ (လိုအပ်သည်):အသေးစားမော်တာကြိမ်နှုန်း converter ကိုရွေးချယ်ခြင်း,Range 00-05,03 ပုံမှန်;
00-ရှန်ဟိုင်း Xielin 01-Fuji
02-yingweiteng 03-Huichuan (zhongchen)、ရော်ဘင်)
04-yaskawa tatsuya 05- မသေး
Inverter Parameter ချိန်ညှိချက်များ
1.Command Source Selection:ဆက်သွယ်ရေး command channel
2.အဓိကကြိမ်နှုန်းအရင်းအမြစ်ရွေးချယ်ခြင်း:ဆက်သွယ်ရေးပေးထားသည်
3.Baud Rate:19200
4.ဒေတာပုံစံ:အတည်ပြုခြင်းမရှိပါ,ဒေတာပုံစံ<8-n-1>
5.ဒေသခံလိပ်စာ:လက်ဝဲကြိမ်နှုန်း converter 1 ကိုသတ်မှတ်ထားသည်,မှန်ကန်သောကြိမ်နှုန်း converter ကို 2 သတ်မှတ်ထားသည်,ကြီးမားသောမော်တာကြိမ်နှုန်း converter ကို 3 ကိုသတ်မှတ်ထားသည်
Remote Control စစ်ဆင်ရေးညွှန်ကြားချက်
1.စက် powered ဖြစ်ပါတယ်,Remote Control ကိုဖွင့်လိုက်သည်,ဝေးလံခေါင်သီထိန်းချုပ်မှုနောက်ခံရိုက်ထည့်ပါ,ဝေးလံခေါင်သီထိန်းချုပ်မှု၏နောက်ခံ parameters တွေကိုသတ်မှတ်,အဓိကအားဖြင့်အသေးစားမော်တာနှင့်ကြီးမားသောမော်တာဗေးဖ်မော်ဒယ်များကိုသတ်မှတ်ပါ (စက်ထုတ်လုပ်သူသည်ဤအဆင့်ကိုကျော်သွားစေရန်ဤအဆင့်ကိုသတ်မှတ်ထားသည်);
2.Inverter Parametters ကိုသတ်မှတ်ပါ (စက်ထုတ်လုပ်သူကသတ်မှတ်ထားပါကဤအဆင့်ကိုကျော်သွားပါ);
3.Remote Control သည် manual mode သို့အလှည့်,ထို့နောက်စက်ကိုအလုပ်လုပ်အနေအထားသို့ရွှေ့ရန်ဝေးလံခေါင်သီထိန်းချုပ်မှုကိုသုံးပါ;
4.manual mode မှာ,ကြီးမားသောမော်တာဖြတ်တောက်ခြင်းလက်ရှိ Setting Value IC ကိုသတ်မှတ်ပါ,မော်တာအမြန်နှုန်းထားပါ;
5.အလိုအလျောက် mode သို့လှည့်,အသေးစားမော်တာ၏ဖြတ်တောက်ခြင်းမြန်နှုန်းကန့်သတ်၏ f တန်ဖိုးကိုသတ်မှတ်ပါ;
6.အလိုအလျောက် mode မှာ,ကြီးမားသောမော်တာ switch ကိုရှေ့သို့စီး။ မော်တာကိုစတင်ရန်,ထို့နောက်မော်တာခလုတ်ကိုရှေ့သို့သို့မဟုတ်နောက်ပြန်ဂီယာသို့လှည့်ပါ,ဝေးလံခေါင်သီထိန်းချုပ်မှုသည်အလိုအလျောက်ဖြတ်တောက်ခြင်း mode ကိုဝင်သည်,ဖြတ်တောက်ပါ。


1.အခန်းအပူချိန်နှင့်ဖိအားမှာပေးပါ,ခြောက်သွေ့သောပတ်ဝန်းကျင်တွင်အသုံးပြုခဲ့သည်,ဝန်ဆောင်မှုဘဝတိုးချဲ့。
2.ကျေးဇူးပြုပြီးမိုးရှာနေတဲ့ရေစိုဖို့ရှောင်ပါ、ထိုကဲ့သို့သောအရည်ကြည်ဖုအဖြစ်ပုံမှန်မဟုတ်သောပတ်ဝန်းကျင်များတွင်အသုံးပြုခဲ့သည်,ဝန်ဆောင်မှုဘဝတိုးချဲ့。
3.ကျေးဇူးပြု. ဘက်ထရီအခန်းနှင့်သတ္တု shrapnel area ရိယာကိုသန့်ရှင်းအောင်ထားပါ。
4.ကျေးဇူးပြု. ညှစ်ခြင်းနှင့်ကျဆင်းခြင်းကိုရှောင်ကြဉ်ပါ,。
5.အချိန်ကြာမြင့်စွာမသုံးပါ,ကျေးဇူးပြုပြီးဘက်ထရီကိုဖယ်ရှားပါ,ဝေးလံခေါင်သီသောထိန်းချုပ်မှုနှင့်ဘက်ထရီကိုသန့်ရှင်းသောလုံခြုံသောနေရာ၌သိုလှောင်ထားပါ。
6.သိုလှောင်မှုနှင့်သယ်ယူပို့ဆောင်ရေးတွင်အစိုဓာတ်ကိုအထောက်အကူပြုခြင်းနှင့်ထိတ်လန့်ဖွယ်အထောက်အထားများကိုဂရုပြုပါ。

1.အသုံးမပြုမီအသုံးပြုရန်ညွှန်ကြားချက်များကိုအသေးစိတ်ဖတ်ပါ,ပရော်ဖက်ရှင်နယ်မဟုတ်သောပုဂ္ဂိုလ်များအားတားမြစ်သည်。
2.ကျေးဇူးပြု. ဘက်ထရီကိုအချိန်မီအစားထိုးပါ,အာဏာမလုံလောက်ခြင်းကြောင့်ဖြစ်ပေါ်လာသောအမှားများကိုရှောင်ကြဉ်ပါ。
3.ပြုပြင်ရန်လိုအပ်လျှင်,ကျေးဇူးပြုပြီးထုတ်လုပ်သူကိုဆက်သွယ်ပါ,Self- ပြုပြင်ခြင်းကြောင့်ဖြစ်ရတဲ့ပျက်စီးဆုံးရှုံးမှုလျှင်,ထုတ်လုပ်သူကအာမခံပေးလိမ့်မည်မဟုတ်ပါ。
(မှတ်ချက်:ထုတ်ကုန်အဆင့်မြှင့်တင်ခြင်းသို့မဟုတ်အဆင့်မြှင့်တင်မှုများ,ထုတ်ကုန်များကို 0 ယ်ယူသောအခါနောက်ဆုံးပေါ်ထုတ်ကုန်အချက်အလက်များကိုရယူရန်အရောင်းစာရေးကိုဆက်သွယ်ပါ။ )





