
Mașină de ferăstrău cu sârmă de tăiere automată cu telecomandă fără fir
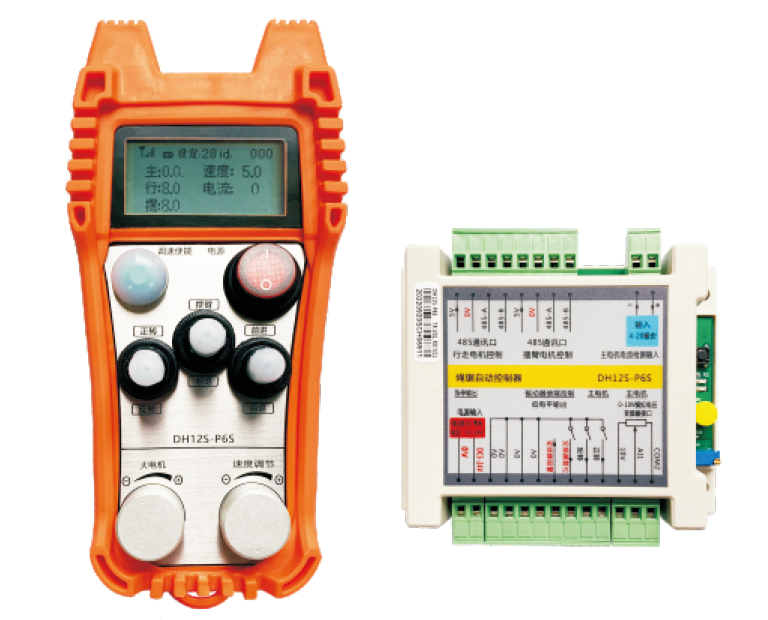
Tăiere automată Telecomandă fără fir a mașinii de ferăstrău cu sârmă DH12S-P6S
Descriere


model:Echipament adaptor DH12S-P6S:Ferăstrău cu sârmă/mașină de ferăstrău cu lamă


Remarcă:Se pot selecta trei tipuri de antene,Antena implicită a cupei de aspirație este echipată cu standard


Viteza motorului principal:gazdă:0-50
Viteza motorului de deplasare:Bine:0-50
Limita maximă de viteză a motorului de deplasare cu tăiere automată:viteză:0-30(Parametrii sunt reglabili)
Curentul de reglare a motorului principal de tăiere automată:înființat:28(Parametrii sunt reglabili)
Viteza motorului brațului oscilant:pune:0-50

Joasă presiune:Bateria telecomenzii este prea mică,Vă rugăm să înlocuiți bateria

Cădeți de pe internet:Întreruperea semnalului wireless,Vă rugăm să verificați alimentarea receptorului,Porniți din nou,Reporniți telecomanda

1、Telecomanda a pornit
Receptorul este pornit,Ledul de alimentare D2 de pe receptor este mereu aprins,Semnalul luminos D1 începe să clipească;Două baterii nr. 5 instalate pe telecomandă,Porniți comutatorul de alimentare,Afișare Afișare Viteza motorului,Înseamnă că pornirea are succes。
2、Motorul principal și reglarea vitezei
Apăsați lung pe „Activare controlul vitezei”,Rotiți comutatorul „înainte/invers” pentru a înaintea,Motorul principal al receptorului se rotește înainte și pornește;
Apăsați lung pe „Activare controlul vitezei”,Rotiți comutatorul „înainte/invers” pentru a înaintea,Motorul principal al receptorului se rotește înainte și pornește;
Apăsați lung pe „Activare controlul vitezei”,Rotiți comutatorul „înainte/invers” la invers,Motorul principal al receptorului se inversează și pornește;
Pur și simplu mutați comutatorul la mijloc sau invers,Motorul principal se oprește imediat,Nu este nevoie să apăsați pe controlul vitezei pentru a activa;
Rotiți butonul „Motor mare”.,Tensiunea de reglare a vitezei invertorului motorului principal al receptorului poate fi reglată 0-10V;
3、Motor de călătorie
3、Motor de călătorie
Apăsați lung pe „Activare controlul vitezei”,Deplasați comutatorul „înainte/înapoi” spre înainte sau înapoi,Motorul de mers se va mișca cu o viteză mare de 50;
4、Motor cu braț oscilant și reglare a vitezei
Rotiți comutatorul „Swing Arm/Reverse” pe brațul oscilant sau înapoi,Motorul brațului oscilant al receptorului pornește;Apoi rotiți butonul „Ajustare viteză”.,Viteza motorului brațului oscilant poate fi reglată;
Apăsați lung pe „Activare controlul vitezei”,Apoi răsuciți comutatorul „braț oscilant/marșarier”.,Motorul brațului oscilant se va mișca la o viteză mare de 50;
5、Reglarea limitei vitezei motorului de deplasare
Apăsați și mențineți apăsat butonul „Activare viteză”.,Rotiți „Ajustarea vitezei” pentru a regla limita maximă de viteză a motorului de deplasare în timpul tăierii automate.;
6、Tăiere automată
Primul pas,Porniți motorul principal;Pasul 2,Reglați limita maximă de viteză a motorului de deplasare;Pasul 3,Rotiți comutatorul „înainte/înapoi” pentru a vă deplasa înainte sau înapoi,Intrați în modul de tăiere automată;
7、Setările parametrilor (utilizatorilor le este interzis să le modifice în mod privat)
Introduceți meniul parametrilor:În modul manual,Când turația motorului principal este 0,Comutatorul înainte/invers este îndoit de 3 ori la rând,Apoi rupe -l de 3 ori la rând,Introduceți meniul parametrilor;
Ieșiți din meniul parametrilor:Butonul de reglare a vitezei de întoarcere a paginii,Alegeți să salvați sau nu,Confirmați apăsând butonul de activare;
Curent nominal:Valoarea maximă a curentului motorului principal,Unitate Amperi;
Parametri de reglare a vitezei:Parametrii automate de control de tăiere,Implicit 800,Unitate de milisecundă,Modificarea este interzisă;
Parametri de decelerare:Când valoarea de modificare a curentului de tăiere depășește această valoare,Începeți să decelerați rapid,Unitate Amperi;
Accelerație A1:Când curentul de tăiere este mai mic decât curentul de tăiere set,Valoarea vitezei a crescut cu fiecare accelerație a motorului de mers;
Decelerarea A2: Când curentul de tăiere este mai mare decât curentul de tăiere set,Valoarea vitezei redusă la fiecare decelerare a motorului de mers;
Curentul brațului oscilant:valoare implicită,Modificarea este interzisă;
opri timpul:După oprire din cauza supraîncărcării curente în modul automat,Verificați din nou curentul după o perioadă de timp,Dacă este mai mică decât curentul setat,Porniți automat motorul de mers;Unitatea secundă,valoare implicită,Modificarea este interzisă;
opri timpul:După oprire din cauza supraîncărcării curente în modul automat,Verificați din nou curentul după o perioadă de timp,Dacă este mai mică decât curentul setat,Porniți automat motorul de mers;Unitatea secundă,valoare implicită,Modificarea este interzisă;
Curent maxim:Gama de curent de feedback al motorului principal,Unitate Amperi;
Gazdă maximă:Gama de afișare a vitezei motorului principal cu telecomandă;
Mers maxim:Parametru nevalid;
Limită de viteză Offset:Când tăiați automat,Afișează limita de viteză a motorului de mers pe telecomandă = 50% din acest parametru;
Adaugă sensibilitate:Când curentul de feedback al motorului principal crește,De fiecare dată valoarea crește peste această valoare,Accelerația motorului de deplasare;
Reduce sensibilitatea:Când curentul de feedback al motorului principal scade,De fiecare dată valoarea scade cu mai mult decât această valoare,Decelerația motorului de deplasare;
Compensarea sensibilității:Increment de compensare pentru parametrii de sensibilitate plus și minus;
Setați curentul:Tăiere automată,Pragul curentului de feedback al motorului principal,depășește această valoare,Motorul de mers începe să încetinească;sub această valoare,Motorul de mers începe să accelereze;Unitate Amperi;
Setați curentul:Tăiere automată,Pragul curentului de feedback al motorului principal,depășește această valoare,Motorul de mers începe să încetinească;sub această valoare,Motorul de mers începe să accelereze;Unitate Amperi;
Ieșire goală:Când începe modul automat,Dacă curentul de feedback al motorului principal este mai mic decât această valoare,este în modul de ralanti,mai mare decât această valoare,apoi ieși din modul de ralanti,Intrați în modul de tăiere,Unitate Amperi;
Curent fără sarcină:Când începe modul automat,Dacă curentul de feedback al motorului principal este mai mic decât această valoare,este în modul fără încărcare,mai mare decât această valoare,apoi ieși din modul fără încărcare,Intrați în modul de tăiere,Unitate Amperi;
Viteza brațului oscilant:Viteza de pornire a motorului brațului oscilant;
modul de tăiere:Comutați între modurile ferăstrău cu lamă și ferăstrău cu sârmă,După comutare, parametrii se vor schimba în mod corespunzător.;În modul ferăstrău cu lamă,Un motor cu braț oscilant este adăugat pe afișajul telecomenzii,Modul ferăstrău cu sârmă nu are un motor cu braț oscilant.;
Timp de rebotare:Când curentul de feedback al motorului principal depășește curentul de oprire,Va detecta continuu curentul de feedback,Timpul de respingere este durata acestei detectii continue.,depășește acest timp,Detectați că curentul motorului principal depășește în continuare curentul de oprire,plimbareMotorul se va opri;În caz contrar, motorul de mers va continua să avanseze;
opri curentul:Curentul de feedback al motorului principal depășește această valoare,Motorul de deplasare se va opri;Unitate Amperi;
offset implicit:Valoarea inițială a limitei de viteză a motorului de mers atunci când telecomanda este pornită = 50% din această valoare;
![]()
| Sursa de alimentare de funcționare a receptorului |
DC24V/1A (sursă de alimentare independentă)
|
| Încărcarea punctului de ieșire a receptorului | AC0-250V/3A DC0-30V/5A |
| Tensiunea de ieșire a reglării vitezei receptorului | DC0-10V |

Dreptul final de interpretare a acestui produs aparține Chengdu Xinshen Technology Co., Ltd.。

-500x650.png)

