ڪريلر رسيء لاء پاڻمرادو وائرلیس ريموٽ ڪنٽرول ڪنٽرول
ڪريلر رسيء کي مشين-آٽوٽٽڪ وائرليس ريموٽ ڪنٽرول ڊي ايڇ 15 ايس ڊي ايل ڊي
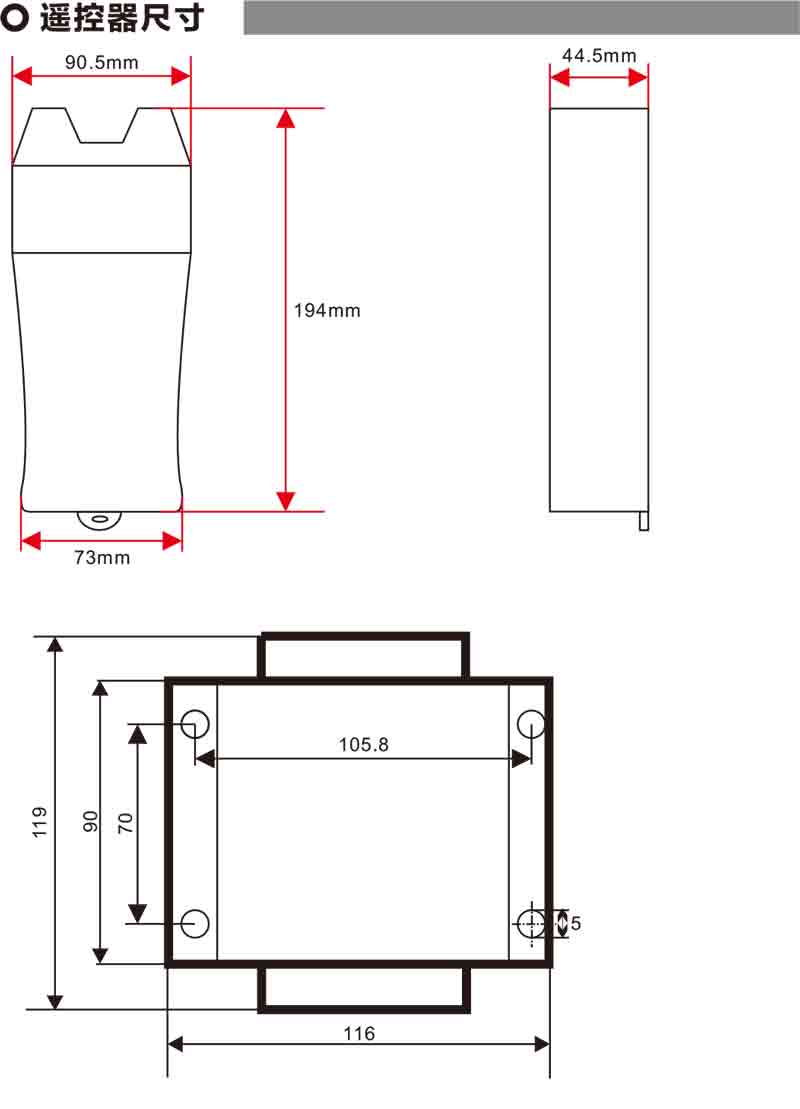
وضاحت

ماڊل:DH12s-ld موافقت جو سامان:ڪريلر رسي ڏٺي مشين

تبصرو:اينٽينا جا ٽي قسم چونڊجي سگهجن ٿا,ڊفالٽ سکشن کپ اينٽينا معياري آهي 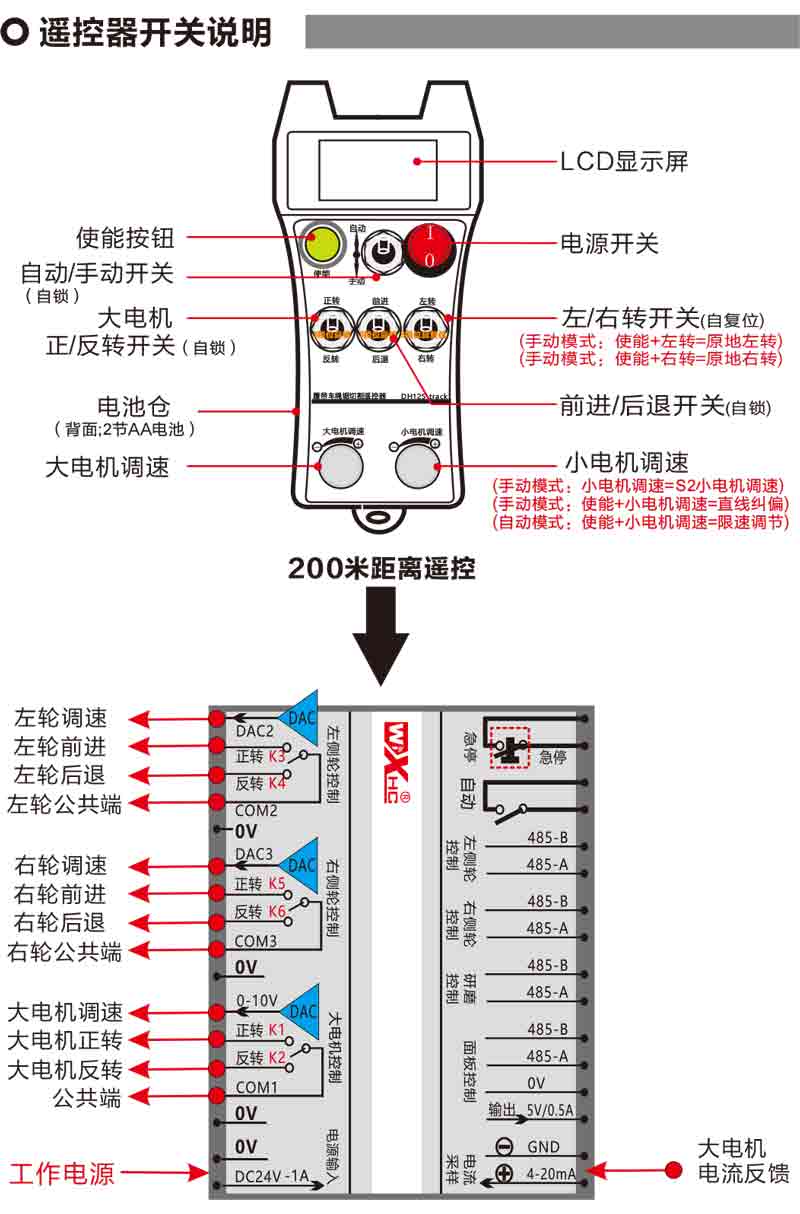

وڏي موٽر اسپيڊ:ايس 1:0-50
نن Mot ي موٽر جي رفتار:ايس 2:0-50
پاڻمرادو ڪٽڻ واري موٽر وڌ کان وڌ رفتار جي حد:بھترين،:0-30(پيرا ميٽرز ترتيب ڏنل آهن)
پاڻمرادو ڪٽڻ وڌ کان وڌ:ا سي:0-35(پيرا ميٽرز ترتيب ڏنل آهن)
لڪير انحراف اصلاح جي قيمت:ڊي اين D:-99-99(1 يونٽ تقريبن 0.02v آهي)
گهٽ گهٽ راز:ريموٽ ڪنٽرول جي بيٽري تمام گهٽ آهي,مهرباني ڪري بيٽري بدلايو
انٽرنيٽ کان ٻاهر ٿيو:وائرلیس سگنل مداخلت,مهرباني ڪري وصول ڪندڙ بجلي جي فراهمي چيڪ ڪريو,ٻيهر طاقت,ريموٽ ڪنٽرول کي ٻيهر شروع ڪيو
![]()
1、ريموٽ ڪنٽرول کوليو ويو
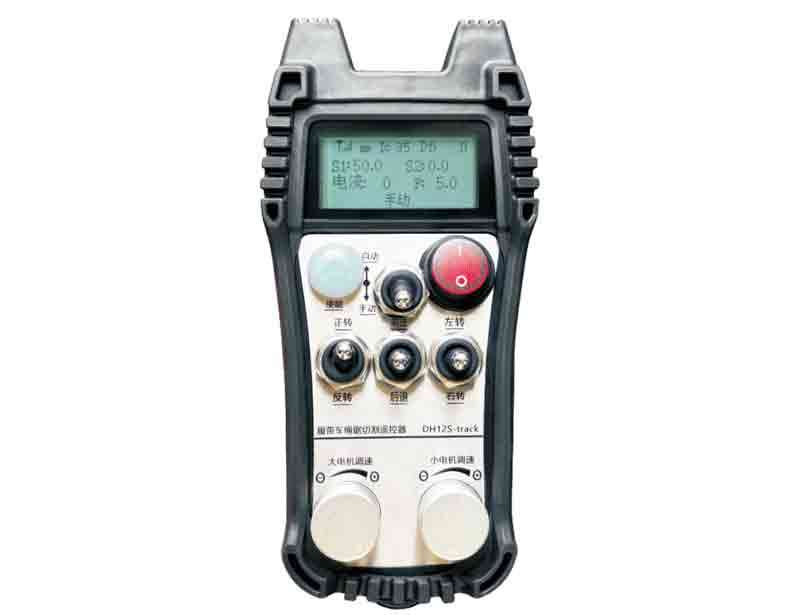
رسيور تي هلندڙ آهي,وصول ڪندڙ تي آر ايف جي اڳواڻي روشني چمڪي ٿي;ريموٽ ڪنٽرول تي ٻه نمبر 5 بيٽرس انسٽال ڪيا ويا,پاور سوئچ کي کوليو,ڊسپلي موٽر اسپيڊ ڏيکاريو,اهو مطلب آهي ته شروعات ڪامياب آهي。
2、وڏي موٽر ۽ رفتار جي ضابطي
اڳتي وڌڻ لاء "فارورڊ / ريورس" مٽايو,وصول ڪندڙ جو وڏو موٽر موڙي ٿو,ڊسپلي ڊسپلي گردش ڏيکاري ٿو ;
;
ريورس ڏانهن "اڳتي / ريورس" مٽايو,وصول ڪندڙ وڏي موٽر ريورس تي,ڊسپلي ڊسپلي ڊسپلي ڏيکاريو ;
;
;ريورس ڏانهن "اڳتي / ريورس" مٽايو,وصول ڪندڙ وڏي موٽر ريورس تي,ڊسپلي ڊسپلي ڊسپلي ڏيکاريو
;"وڏي موٽر اسپيڊ ريگيوليشن" کٽيو,اهو وصول ڪندڙ وڏي موٽر اسپيڊ ريگيوليشن جي آئوٽ وولٽ کي ترتيب ڏئي سگهي ٿو 0-10v;
3、نن Mot ي موٽر ۽ اسپيڊ ريگيوليشن
اڳتي وڌڻ لاء "فارورڊ / ريورس" مٽايو,وصول ڪندڙ ريوالور ترقي ۽ صحيح ترقي کليل,اڳتي وڌو
پوئتي ڏانهن "فارورڊ / ريورس" مٽايو,وصول ڪندڙ ريورسل ۽ سا right ي ويل ريورسل کليل,واپس ريايو
دستي موڊ ۾:"نن motter ي موٽر اسپيڊ ريگيوليشن" کي گھمايو,هڪ ئي وقت تي، وصول ڪندڙ جي کاٻي پاسي واري کاٻي پاسي واري وولٽيج جي آئوٽ وولٽيج کي ترتيب ڏيو 0-10v;
دستي موڊ ۾:"نن motter ي موٽر اسپيڊ ريگيوليشن" کي گھمايو,هڪ ئي وقت تي، وصول ڪندڙ جي کاٻي پاسي واري کاٻي پاسي واري وولٽيج جي آئوٽ وولٽيج کي ترتيب ڏيو 0-10v;
4、کاٻي ۽ سا right ي طرف
کاٻي پاسي "کاٻي / سا" "سوئچ کي مٽايو,وصول ڪندڙ صحيح ويل ويلز کولڻ لاء,ڊسپلي ڊسپلي کاٻي پاسي
"کاٻي / سا" ي "کي سا right ي طرف مٽايو,وصول ڪندڙ ريوالور ايڊوانس کوليندو آهي,ڊسپلي ڊسپلي صحيح موڙيندو آهي
5、جڳھ ۾ يرائڻ
دستي موڊ ۾:
کاٻي پاسي واري جاء تي:پريس ڪريو بٽڻ دٻايو ۽ دٻايو,کاٻي پاسي "کاٻي / سا" "سوئچ کي مٽايو,وصول ڪندڙ جي ريورسل ۽ سا right ي ويل ويل ايڊوانس کليل,جڳهه ۾ کاٻي پاسي وڃڻ شروع ڪيو;
دائیں طرف مڙي:پريس ڪريو بٽڻ دٻايو ۽ دٻايو,"کاٻي / سا" ي "کي سا right ي طرف مٽايو,ريڪارڊ جي ريوالور ترقي ۽ سا right ي طرف واري پٺيون کليل آهن,جڳھ تي سا to ي طرف رخ ڪرڻ شروع ڪيو;
6、نن Mot ي موٽر اسپيڊ جي حد ترتيب
خودڪار موڊ ۾:پريس ڪريو بٽڻ دٻايو ۽ دٻايو,"نن motter ي موٽر اسپيڊ ريگيوليشن" پاڻمرادو ڪٽڻ دوران نن moto ي موٽر جي وڌ ۾ وڌ رفتار کي ترتيب ڏيڻ لاء;
7、پاڻمرادو ڪٽڻ
پهريون قدم,وڏي موٽر شروع ڪيو;
قدم 2,موڊ سوئچ کي "آٽو" ڏانهن مٽايو;
قدم 3,نن moto ي موٽر شروع ڪريو,اسڪرين ڊسپلي ۾ داخل ٿي ٿو "ڪٽڻ پاڻمرادو",ظاهر ڪري ٿو ته پاڻمرادو ڪٽڻ وارو طريقو داخل ڪيو ويو آهي;
قدم 2,موڊ سوئچ کي "آٽو" ڏانهن مٽايو;
قدم 3,نن moto ي موٽر شروع ڪريو,اسڪرين ڊسپلي ۾ داخل ٿي ٿو "ڪٽڻ پاڻمرادو",ظاهر ڪري ٿو ته پاڻمرادو ڪٽڻ وارو طريقو داخل ڪيو ويو آهي;
8、سڌي لائين جي اصلاح
جڏهن کاٻي ۽ سا مو مو موٽر اڳتي وڌندي ۽ پوئتي رهجي وڃي رهي آهي,اتي کاٻي ۽ سا ins ي رفتار ۾ فرق آهي,سڌي لائين هلڻ بند آهي,ريموٽ ڪنٽرول جو لڪير انحراف اصلاحي فنڪشن استعمال ٿي سگهي ٿو,کاٻي ۽ سا right ي ويلز جي رفتار کي ٺيڪ ڪريو;
اصلاح جو اصول:تعصب جي اصلاح جي فنڪشن ذريعي,ٺيڪ-ٽون ريوالور اسپيڊ,ساڳي رفتار کي صحيح ويل طور تي حاصل ڪرڻ لاء,کي کاٻي ۽ سا right ي ويل رفتار جي هم وقت سازي جو احساس ڪيو,آفسيٽ ختم ڪريو;
اصلاحي آپريشن جو طريقو:دستي موڊ ۾,پريس ڪريو بٽڻ دٻايو ۽ دٻايو,"نن mot ي موٽر اسپيڊ ريگيوليشن" کي گھرايو;
گھڙيال کي گھمايو,ريوالور اسپيڊ وولٽيج کي وڌايو,ڊسپلي اسڪرين جي انحراف جي درستگي جي قيمت وڌائي وئي;
گھمڻ وار کي گھمايو,ريوالور اسپيڊ وولٽيج کي گهٽايو,ڊسپلي انحراف جي درستگي جي قيمت گهٽجي وئي آهي;
اصلاحي حد:اصلاحي قيمت -90 کان 90 تائين;1هر انحراف جي اصلاح جي درستگي جو تجزياتي وولٽ تقريبن 0.02v آهي;
9、پيرا ميٽر مينيو (صارف نجي تبديلين کي منع ڪري ٿو)
ريموٽ ڪنٽرول جا ڪجهه ڪم پيرا ميٽرز ذريعي ترتيب ڏئي سگهجن ٿا,دستي موڊ ۾,جڏهن نن Mot ي موٽر S2 جي رفتار 10 آهي,
اڳتي / ريورس سوئچ 3 ڀيرا قطار ۾ جھڪيل آهي,پوء هن کي قطار ۾ 3 ڀيرا ٽوڙيو,پيٽرولر مينيو داخل ڪريو;
پيرا ميٽرز مينيو مان نڪرو:محفوظ ڪرڻ لاء چونڊيو يا نه,پوء نڪرڻ جي تصديق لاء فعال بٽڻ کي دٻايو;
وڌ کان وڌ موجوده:ڪٽڻ واري موٽر جي موجوده ڪم ڪرڻ,موجوده موجوده هن موجوده جو 80 سيڪڙو آهي;
اسپيڊ ريگيوليشن پيراگراف:پاڻمرادو ڪٽڻ واري ڪنٽرول پيراگراف,ڊفالٽ 800,تبديلي ممنوع آهي;
فريب پيرا ميٽرز:پاڻمرادو ڪٽڻ واري ڪنٽرول پيراگراف,جڏهن ڪٽڻ واري تبديلي واري قيمت هن قيمت کان وڌي ٿي,سست ڪرڻ شروع ڪيو
ايڪليشن اي 1: پاڻمرادو ڪٽڻ واري ڪنٽرول پيراگراف,جڏهن ڪٽڻ واري موجوده سيٽ ڪٽڻ کان گهٽ آهي,آهستي آهستي تيز ڪريو;
فريب A2: پاڻمرادو ڪٽڻ واري ڪنٽرول پيراگراف,جڏهن ڪٽڻ واري موجوده سيٽ ڪٽڻ کان وڌيڪ آهي,سست رفتار;
خودڪار چاقو گڏ ڪرڻ:غلط;
پنهنجو پاڻ کي تالا لڳائڻ شروع ڪيو:0,پنهنجو پاڻ کي لاڪ نه ڪيو;1,خودڪشي. فعال ڪريو پريس + اڳتي وڌڻ لاء اڳتي وڌو,۽ ان کي لاڪ ڪيو;
وڌ کان وڌ پنڌ:گھٽ ۾ گھٽ موٽر رفتار;
موجوده ڪٽڻ:خودڪار ڪٽڻ لاء مکيه موٽر جي وڌ ۾ وڌ موجوده قيمت مقرر ڪريو,راء موجوده هن قيمت کان وڌي ٿي,سست ڪرڻ شروع ڪيو;
ڊفالٽ رفتار جي حد:جڏهن طاقت ڏيڻ,پاڻمرادو ڪٽڻ واري رفتار لاء وڌ کان وڌ رفتار جي رفتار;
خودڪار موڊ:0,پاڻمرادو سوئچ پاڻمرادو ڪنٽرول آهي;1,خودڪار سوئچ ڪنٽرول پاڻمرادو آئي او آئوٽ پوائنٽ;
رفتار جي حد آفسيٽ:جڏهن پاڻمرادو ڪٽڻ,نن moto ي موٽر جي وڌ ۾ وڌ رفتار;
وڌ کان وڌ ھائو:وڏي موٽر وڌ کان وڌ رفتار.
| وصول ڪندڙ آپريٽنگ بجلي جي فراهمي | DC24V / 1A (آزاد بجلي جي فراهمي) |
| وصول ڪندڙ جي آئوٽ پوائنٽ لوڊ | AC0-250V / 3A DC0-30V / 5a |
| وصول ڪندڙ جي رفتار ريگيوليٽ آئوٽ وولٽ |
DC0-10V
|