

ڪريلر رسيء لاء پاڻمرادو وائرلیس ريموٽ ڪنٽرول ڪنٽرول
ٽريڪ ڪار ريم کي ريموٽ ڪنٽرول ڊي ايڇ 2S-LD-485
وضاحت

1.پيداوار جو تعارف
ڪريلر تار ڏٺو خودڪار ڪٽڻ ريموٽ ڪنٽرول ڪريلر تار ڏٺو ڪٽڻ جي مشين لاءِ موزون آهي,485Modbus RTU پروٽوڪول کي ڪنٽرول ڪرڻ لاء استعمال ڪيو ويندو آهي کاٻي ۽ ساڄي ڪريلر انورٽر اسپيڊ ريگيوليشن شروع ۽ سامهون، پوئتي، کاٻي ۽ ساڄي طرف ڪنٽرول.,۽ وڏي موٽر فریکوئنسي ڪنورٽر رفتار ريگيوليشن شروع。۽ وڏي موٽر انورٽر جو ڪم ڪندڙ موجوده 485-Modbus RTU پروٽوڪول ذريعي پڙهي سگهجي ٿو,تجزيو ۽ وڏي موٽر واء جو مقابلو,خود بخود صحيح وقت ۾ کاٻي ۽ ساڄي ٽريڪ جي رفتار کي ترتيب ڏيو,خودڪار ڪٽڻ جي فنڪشن کي محسوس ڪريو。
2.پيداوار جون خاصيتون
1.433mhz وائرلیس مواصلات ٽيڪنالاجي کي اپنائڻ,وائرليس آپريٽنگ فاصلو 100 ميٽر。
2.خودڪار فریکوئنسي هپنگ فنڪشن کي اختيار ڪيو,هڪ ئي وقت وائرليس ريموٽ ڪنٽرول جا 32 سيٽ استعمال ڪريو,هڪ ٻئي تي ڪوبه اثر ناهي。
3.485 modbus RTU پروٽوڪول سان سڀني فريکوئنسي ڪنورٽرز کي سپورٽ ڪري ٿو,في الحال موافقت inverter brands شامل آهن:شنگھائي Xielin、فوجي、هيوچيان、زونگچن、INVT、Yasukawa Tatsu。جيڪڏهن برانچ ٺاهيل نه آهي، مهرباني ڪري اسان سان رابطو ڪريو حسب ضرورت لاء.。
4.سپورٽ وڏي موٽر فریکوئنسي ڪنورٽر اسپيڊ ريگيوليشن、شروع ڪريو、موجوده پڙهائي。
5.سپورٽ کاٻي ۽ ساڄي ڪريلر انورٽر اسپيڊ ايڊجسٽمينٽ、شروع ڪريو、اڳيان ۽ پوئتي کاٻي ۽ ساڄي ڪنٽرول。
6.سپورٽ کاٻي ۽ ساڄي ڪريلر انورٽر لڪير اصلاح,مشين کي سڌي لڪير ۾ حرڪت رکو。
7.سپورٽ تار خودڪار ڪٽڻ جي فنڪشن ڏٺو,وڏي موٽر موجوده معلومات موجب,خود بخود صحيح وقت ۾ کاٻي ۽ ساڄي ٽريڪ جي رفتار کي ترتيب ڏيو。
8.اهو موٽر جي شروعات ۽ اسٽاپ کي ڪنٽرول ڪرڻ لاءِ سڌو IO آئوٽ سان پڻ مطابقت رکي ٿو.,اينالاگ وولٹیج آئوٽ پٽ موٽر اسپيڊ ڪنٽرول ڪري ٿو。
3.پيداوار specifications
| هينڊلڊ ٽرمينل ڪم ڪندڙ وولٽيج ۽ موجوده | 2AA بيٽري-3V/10mA |
| وصول ڪندڙ آپريٽنگ وولٹیج ۽ موجوده | 24V/1A |
| هٿ سان طاقت جي طاقت | 15ڊي بي سي |
| وصول ڪندڙ حساسيت حاصل ڪندا | -100ڊي بي سي |
| وائرلیس مواصلات فريڪوئنسي | 433ايم ايڇز فريڪوئنسي بينڊ |
| آپريٽنگ درجه حرارت | -25℃<ايڪس<55℃ |
| مخالف جي اوچائي | قومي جانچ واري معيار تي عمل ڪريو |
| پنروڪ گريڊ | IP67 |
| پيداوار جي ماپ | 225*84*58(ايم ايم) |
4.پيداوار جي فنڪشن جو تعارف
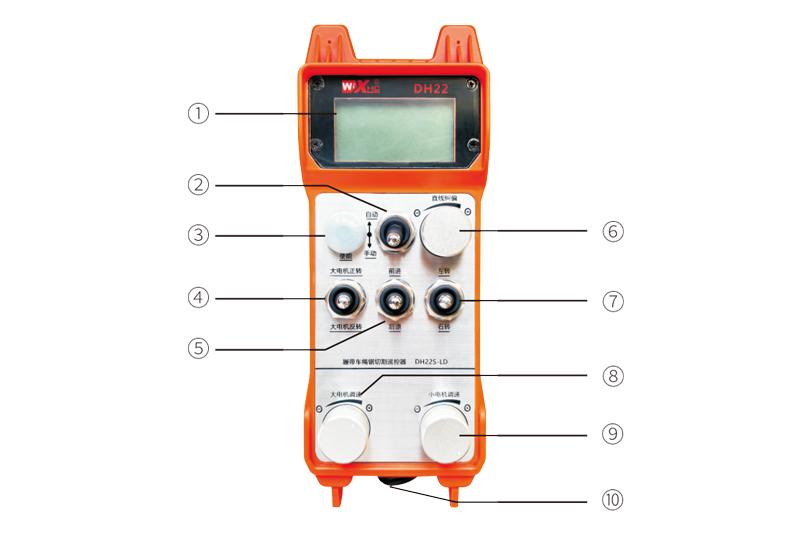
سممريون:
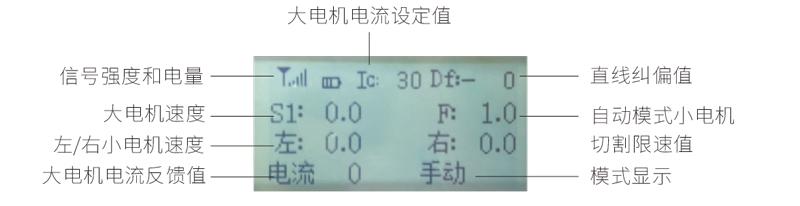
①اسڪرين ڊسپلي:
② موڊ سوئچ:
2-رفتار سوئچ اپنائڻ,خودڪار ۽ دستي طريقن جي وچ ۾ مٽائي سگھي ٿو,ڊسپلي تي هڪ لاڳاپيل موڊ ڊسپلي سوئچ هوندو.。
③ چالو ڪريو:
گڏيل بٽڻ,ڪجھ عملن کي هلائڻ لاءِ فعال بٽڻ کي دٻائڻ ۽ رکڻ جي ضرورت آھي,تفصيل لاءِ هر سوئچ جي وضاحت ڏسو.。
④ وڏي موٽر سوئچ:
3-رفتار ري سيٽ سوئچ کي اپنائڻ,هن سوئچ کي ڦيرايو,وڏي موٽر جي اڳتي ۽ ريورس گردش کي ڪنٽرول ڪري سگھي ٿو,وڃڻ کان پوءِ به حيثيت قائم رهندي,ڊسپلي تي هڪ لاڳاپيل ڊسپلي هوندي,S1↑ تير اشارو ڪري ٿو اڳتي جي گردش,S1↓ تير اشارو ڪري ٿو ريورسل。
⑤ننڍي موٽر اڳتي / ريورس سوئچ:
3-رفتار خود تالا ڪرڻ واري سوئچ کي اپنائڻ,فعال بٽڻ کي دٻايو + سوئچ کي ڦيرايو,ننڍي موٽر کي ڪنٽرول ڪري سگهي ٿو اڳتي وڌڻ ۽ پوئتي وڃڻ لاء,ڊسپلي تي هڪ لاڳاپيل ڊسپلي هوندي,↑↑ تير اڳتي اشارو ڪن ٿا,↓↓ تير واپس وڃڻ جو اشارو ڪري ٿو。
⑥ليڪي انحراف جي اصلاح:
ملٽي ٽرن انڪوڊر نوب استعمال ڪندي,فعال بٽڻ کي دٻايو,گھڙي ساڄي طرف ڦيرايو,سڌي لڪير اصلاح ڊسپلي:ڊي اين D:کاٻو,گھڙي جو هر موڙ 1 يونٽ وڌائي ٿو.,کاٻي موٽر جي رفتار وڌائي ٿو 0.1 يونٽ;کٻي کاٻي پاسي ڦيرايو,سڌي لڪير اصلاح ڊسپلي:ڊي اين D:ساڄو,گھڙي جو هر موڙ 1 يونٽ وڌائي ٿو.,صحيح موٽر جي رفتار 0.1 يونٽن کان وڌي ٿي。
⑦Small موٽر موڙ سوئچ:
3-رفتار ري سيٽ سوئچ کي اپنائڻ,ھن سوئچ کي دستي موڊ ۾ ڦيرايو,کاٻي ۽ ساڄي موڙ لاء ننڍي موٽر ڪنٽرول ڪري سگهو ٿا,ريموٽ ڪنٽرول پاڻمرادو وڃڻ کان پوءِ هن عمل کي روڪي ڇڏيندو.。اڳتي هلي حالت ۾,هن سوئچ کي ڦيرايو,ڊسپلي تي هڪ لاڳاپيل ڊسپلي هوندي,← ↑ تير کاٻي موڙ ڏانهن اشارو ڪري ٿو,↑→تير اشارو ڪري ٿو ساڄي مُڙندو。واپسي جي حالت ۾,هن سوئچ کي ڦيرايو,ڊسپلي تي هڪ لاڳاپيل ڊسپلي هوندي,←↓ تير کاٻي موڙ ڏانهن اشارو ڪري ٿو,↓→تير اشارو ڪري ٿو ساڄي مُڙڻ。
⑧ وڏي موٽر جي رفتار ضابطو:
ملٽي ٽرن انڪوڊر نوب استعمال ڪندي,هر وقت 1 فريم کي گھمايو,وڏي موٽر رفتار جي قيمت تقريبن 0.2 يونٽن جي تبديلين سان,تيز گردش تيز رفتار موٽر رفتار جي قيمت کي تبديل ڪري سگھي ٿو。
⑨ننڍو موٽر رفتار ضابطو:
ملٽي ٽرن انڪوڊر نوب استعمال ڪندي,دستي موڊ ۾,فعال بٽڻ کي دٻايو,ان کان پوء هر وقت 1 فريم کي گھمايو,کاٻي ۽ ساڄي ننڍڙن موٽرن جي رفتار جي قدر اٽڪل 0.1 يونٽ ۾ تبديل ٿي ويندي آهي,تڪڙو گھمڻ تڪڙو تڪڙو ننڍي موٽر جي رفتار جي قيمت کي تبديل ڪري سگھي ٿو。خودڪار موڊ ۾,فعال بٽڻ کي دٻايو,ان کان پوء هر وقت 1 فريم کي گھمايو,ننڍي موٽر جي رفتار جي حد جي قيمت F بابت اٽڪل 0.1 يونٽ طرفان تبديل ٿي وئي آهي,جلدي گردش کي جلدي تبديل ڪري سگھي ٿو ننڍي موٽر جي رفتار جي حد قدر。
⑩ريموٽ ڪنٽرول پاور سوئچ:
ريموٽ ڪنٽرول ڊسپلي پاور آن。
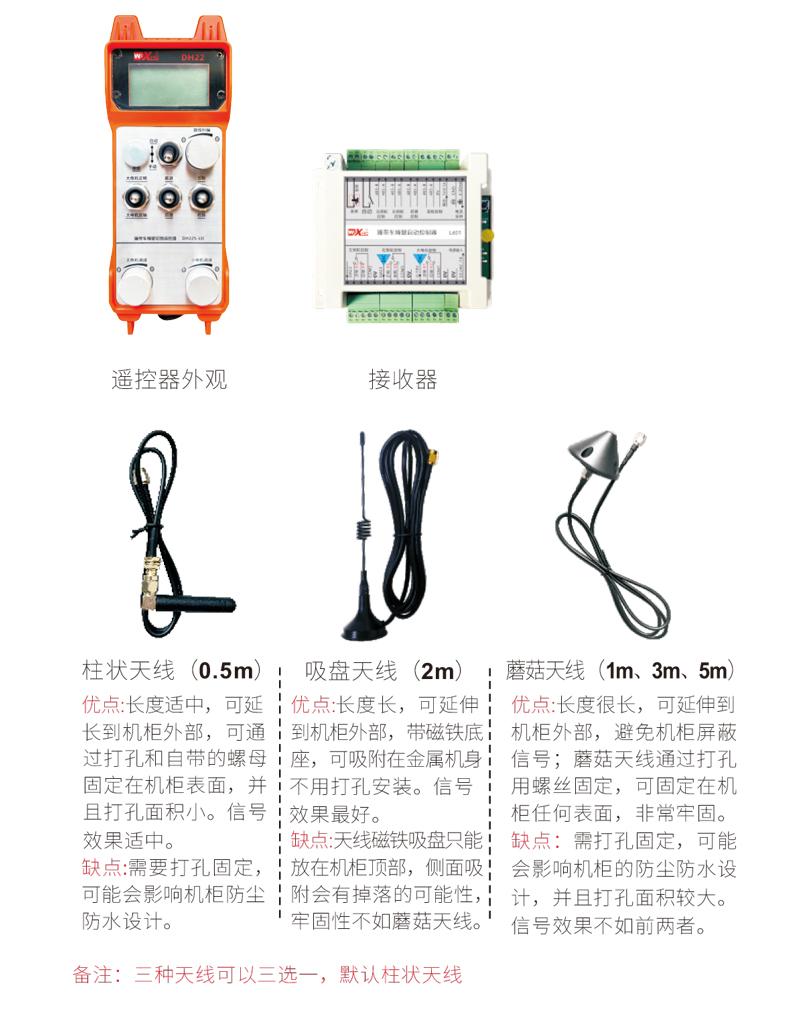
5.مصنوعات جي لوازمات جو خاڪو
6.پيداوار جي انسٽاليشن ھدايت
6.1پروڊڪٽ انسٽاليشن جا قدم
6.1پروڊڪٽ انسٽاليشن جا قدم
1.برقي ڪابينا ۾ وصول ڪندڙ کي انسٽال ڪريو پوئتي تي سنيپ تي,يا وصول ڪندڙ جي چئن ڪنڊن تي اسڪرو سوراخ ذريعي برقي ڪابينا ۾ ان کي انسٽال ڪريو.。
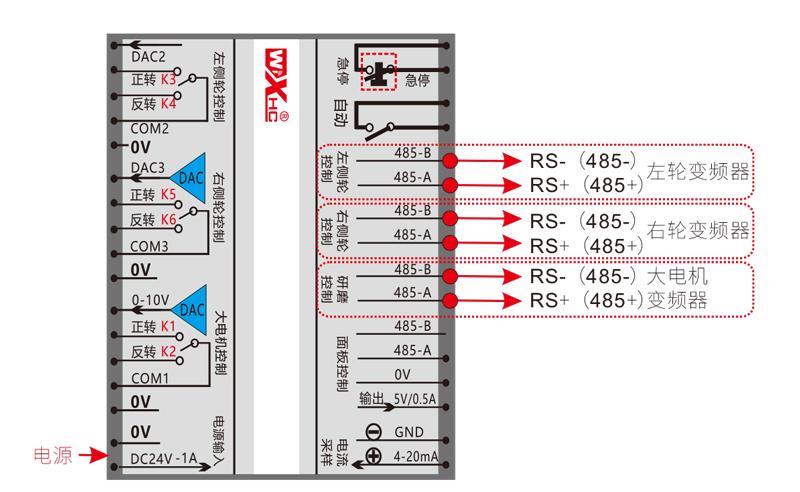
2.اسان جي رسيور وائرنگ ڊاگرم جو حوالو ڏيو,توهان جي آن سائيٽ جو سامان جو مقابلو ڪريو,ڊيوائس کي وائر ذريعي رسيور سان ڳنڍيو。
3.وصول ڪندڙ کي طئي ڪرڻ بعد,اينٽينا وصول ڪندڙ سان ليس آهي,۽ اينٽينا جي ٻاهرئين پڇاڙي کي انسٽال ڪريو يا ان کي برقي ڪابينا کان ٻاهر رکڻ,اهو اليڪٽرڪ ڪابينا جي چوٽي تي سگنل رکڻ جي سفارش ڪئي وئي آهي.,ان کي اينٽينا کي ختم ڪرڻ جي اجازت ناهي,يا ڪندو
اينٽينا برقي ڪابينا جي اندر رکيل آهي,اهو سگنل کي ناقابل استعمال هجڻ جو سبب بڻجي سگهي ٿو。
4.آخرڪار، ريموٽ ڪنٽرول ۾ بيٽرين کي انسٽال ڪريو,بيٽري جي ڍڪ کي مضبوط ڪريو,پوءِ ريموٽ ڪنٽرول پاور سوئچ کي چالو ڪريو,ريموٽ ڪنٽرول ڊسپلي عام ڪم ڪندڙ انٽرفيس ڏيکاريندو.,توهان ريموٽ ڪنٽرول آپريشن ڪري سگهو ٿا。
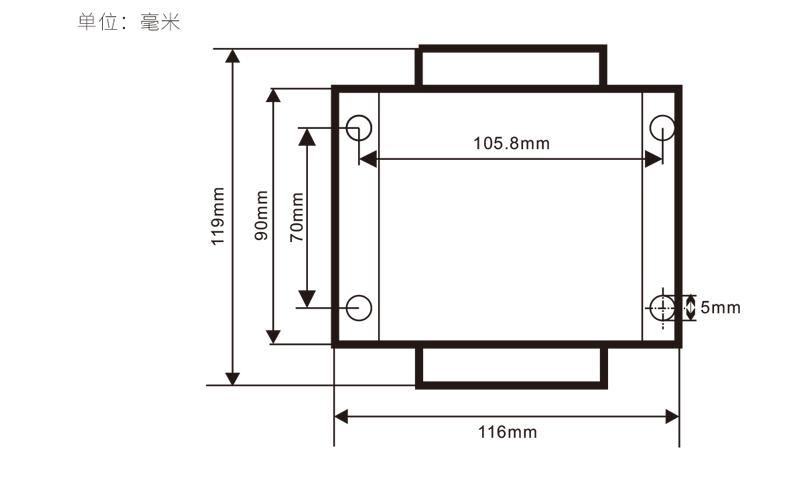
6.2وصول ڪندڙ انسٽاليشن جي ماپ
6.3وصول ڪندڙ وائرنگ ريفرنس ڊاگرام
7.پيداوار جي آپريٽنگ هدايتون
7.1ريموٽ ڪنٽرول پيٽرولر سيٽنگون
ريموٽ ڪنٽرول پس منظر پيٽرولر جو طريقو داخل ڪريو:موڊ سوئچ کي دستي موڊ ڏانھن منتقل ڪريو,ننڍي موٽر جي رفتار کي کاٻي ۽ ساڄي پاسي 25 تائين ترتيب ڏني وئي آهي,يا ٻئي 0 آهن、10、20、40、50,وڏي موٽر جي فارورڊ گھمڻ واري سوئچ کي قطار ۾ 3 ڀيرا مٿي ڏانھن ڇڪيو,مسلسل 3 ڀيرا ھيٺ لھي;
صفحا ڦيرائڻ لاءِ ”ننڍي موٽر اسپيڊ ايڊجسٽمينٽ“ جو استعمال ڪريو,فعال کي دٻائڻ کان پوء، پيٽرولن کي تبديل ڪرڻ لاء ننڍڙي موٽر اسپيڊ ڪنٽرول نوب کي ڦيرايو.;
ترميم کان پوء,صفحي کي آخر تائين ڦيرايو,چونڊيو محفوظ ڪريو ۽ نڪرڻ,مينيو مان نڪرڻ لاءِ فعال بٽڻ کي دٻايو;
پيرا ميٽر هن ريت آهن:
وڌ کان وڌ موجوده:وڏي موٽر موجوده موٽ جي قيمت جي حد,سيٽنگ جي حد 15-200A,ڊفالٽ 100;
اسپيڊ ريگيوليشن پيراگراف:خودڪار موڊ ننڍڙي موٽر خودڪار طريقي سان رفتار کي تيز ڪري ٿو,ننڍو، تيز,سيٽنگ جي حد 200-1500,ڊفالٽ 800;
فريب پيرا ميٽرز:اجازت ڏنل موٽر رفتار جي تبديلين لاء مٿين حد مقرر ڪريو,جڏهن موجوده تبديلي هن قدر کان وڌي ٿي,سست ٿي ويندي。
ننڍو,کاٻي ۽ ساڄي موٽر تيزيءَ سان سست ٿين ٿا,رينج 05-12,ڊفالٽ 06;
ايڪليشن اي 1:وڏي موٽر، تيز رفتار وڌائي ٿي.,حد 00-06,ڊفالٽ 01;
فريب A2:موٽر جي رفتار جيتري وڏي هوندي، اوتري تيزيءَ سان گهٽجي ويندي.,حد 00-06,ڊفالٽ 02;
رفتار جي ترتيب کي فعال ڪريو:ڇا ننڍي موٽر جي رفتار کي ترتيب ڏيڻ لاء فعال کي دٻائڻ ضروري آهي؟,00نااهل,01چالو ڪرڻ,ڊفالٽ 01;
پنهنجو پاڻ کي تالا لڳائڻ شروع ڪيو:ڇا فارورڊ ۽ ريورس سوئچ ڇڏڻ کان پوءِ وڏي موٽر خود بخود سيلف لاڪنگ برقرار رکندي؟,00برقرار نه رکڻ,01رکڻ,ڊفالٽ 01;
وڌ کان وڌ پنڌ:کاٻي ۽ ساڄي موٽر جي وڌ ۾ وڌ رفتار,رينج 10-100,ڊفالٽ 50;
موجوده ڪٽڻ:وڌ ۾ وڌ موجوده ڪٽڻ,اسڪرين ڏيکاري ٿو IC قدر,رينج 15-160,ڊفالٽ 30,اسڪرين سان لاڳاپيل ڊسپلي IC:30。هن پيٽرولر جي مٿين حد = وڌ ۾ وڌ موجوده x80٪;
ڊفالٽ رفتار جي حد:ڊفالٽ ننڍي موٽر خودڪار ڪٽڻ جي رفتار شروع تي,رينج 00-100,ڊفالٽ 10,اسڪرين سان لاڳاپيل ڏيکاري ٿو F1.0,هي پيٽرول صرف صحيح آهي جڏهن وڌ ۾ وڌ پنڌ 50 تي مقرر ڪيو ويو آهي。
خودڪار موڊ:00 تي سيٽ ڪريو,خودڪار / دستي سوئچ هڪ موڊ سوئچ آهي,01 تي سيٽ ڪريو,خودڪار / دستي سوئچ کي خودڪار پوزيشن ڏانھن ڦيرايو,ڊسپلي ڊسپلي جي روشني,رسيور تي خودڪار ٽرمينل ٻاھر بند بندش,دستي کي مارو,خودڪار آئوٽ پٽ ٽرمينل ڪنيڪشن;
رفتار جي حد آفسيٽ:ننڍي موٽر خودڪار ڪٽڻ جي رفتار اپر حد,رينج 00-200,ڊفالٽ 60,اسڪرين 6.0 ڊسپلي سان ملندڙ جلندڙ آهي;ڏيکاريو قدر مٿئين حد = رفتار جي حد آفسیٹ × 0.1;
وڌ کان وڌ ھائو:وڏي موٽر جي وڌ ۾ وڌ رفتار,رينج 10-100,ڊفالٽ 50;
mbus ڊوائيس (گهربل):وڏي موٽر inverter ماڊل چونڊ,رينج 00-03,ڊفالٽ 03;
00-شنگھائي Xielin 01-فوجي
02-INVT 03-Huichuan (Zhongchen、رابن ڪانگ)
sbus ڊوائيس (گهربل):ننڍي موٽر inverter ماڊل چونڊ,رينج 00-05,ڊفالٽ 03;
00-شنگھائي Xielin 01-فوجي
02-INVT 03-Huichuan (Zhongchen、رابن ڪانگ)
04-Yaskawa Da 05-ڪو به نه
7.2فريکوئنسي ڪنورٽر جي پيٽرول سيٽنگ
1.حڪم جو ذريعو چونڊ:ڪميونيڪيشن ڪمانڊ چينل
2.مکيه تعدد ذريعو چونڊ:مواصلات ڏني وئي
3.باڊ جي شرح:19200
4.ڊيٽا فارميٽ:نه چيڪسم,ڊيٽا فارميٽ<8-N-1>
5.مقامي پتو:کاٻي فريڪوئنسي ڪنورٽر 1 تي سيٽ ڪيو ويو آهي,صحيح فریکوئنسي ڪنورٽر 2 تي مقرر ڪيو ويو آهي,وڏو موٽر انورٽر 3 تي مقرر ڪيو ويو آهي
7.3ريموٽ ڪنٽرول آپريٽنگ هدايتون
1.مشين طاقتور آهي,ريموٽ ڪنٽرول کوليو ويو,ريموٽ ڪنٽرول پس منظر داخل ڪريو,ريموٽ ڪنٽرول جي پس منظر جي ماپ مقرر ڪريو,مکيه
اهو ننڍي موٽرز ۽ وڏن موٽرز جي انورٽر ماڊل کي سيٽ ڪرڻ آهي (هن قدم کي ڇڏي ڏيو جيڪڏهن مشين ٺاهيندڙ ان کي سيٽ ڪيو آهي);
2.انورٽر پيٽرول سيٽ ڪريو (هن قدم کي ڇڏي ڏيو جيڪڏهن مشين ٺاهيندڙ انهن کي سيٽ ڪيو آهي);
3.ريموٽ ڪنٽرول کي مينوئل موڊ ۾ تبديل ڪريو,پوء مشين کي ڪم ڪرڻ واري پوزيشن ڏانهن منتقل ڪرڻ لاء ريموٽ ڪنٽرول استعمال ڪريو;
4.دستي موڊ ۾,وڏي موٽر ڪٽڻ واري موجوده سيٽنگ جي قيمت IC مقرر ڪريو,وڌ ۾ وڌ موٽر جي رفتار مقرر ڪريو;
5.خودڪار طريقي سان تبديل ڪريو,ننڍي موٽر ڪٽڻ جي رفتار جي حد F قدر مقرر ڪريو;
6.خودڪار موڊ ۾,وڏي موٽر کي شروع ڪرڻ لاءِ وڏي موٽر جي سوئچ کي اڳتي وڌايو,ان کان پوء ننڍي موٽر جي سوئچ کي ڦيرايو
اڳتي يا ريورس گيئر,ريموٽ ڪنٽرول خودڪار ڪٽڻ واري موڊ ۾ داخل ٿئي ٿو,ڪٽڻ شروع ڪريو。
8.مصنوعات جي مسئلن جي حل
| غلطي صورتحال | ممڪن سبب |
مسئلو حل ڪرڻ جا طريقا
|
|
پاور سوئچ کي دٻايو,
بند ۽ بند نٿو ڪري سگھجي,
ڊسپلي روشن نه ٿيندي آهي
|
1.ريموٽ ڪنٽرول تي بيٽري انسٽال ٿيل ناهي
يا بيٽري جي هدايت غلط طريقي سان انسٽال ٿيل آهي
2.بيٽري پاور ناکافي بيٽري
3.ريموٽ ڪنٽرول ناڪامي
|
1.ريموٽ ڪنٽرول جي بيٽري جي انسٽاليشن چيڪ ڪريو
2.متبادل بيٽري
3.سار سنڀال لاء ڪارخاني ڏانهن واپس آڻڻ لاء ڪارخاني سان رابطو ڪيو
|
|
ريموٽ ڪنٽرول کوليو ويو,
ڏيکاري ٿو نيٽ ورڪ بندش ۽ هنگامي اسٽاپ!
مهرباني ڪري ٻيهر ڪوشش ڪريو!
|
1.وصول ڪندڙ کي طاقت نه آهي
2.وصول ڪندڙ اينٽينا انسٽال ٿيل ناهي
3.ريموٽ ڪنٽرول جي وچ ۾ فاصلو ۽ مشين تمام پري آهي
4.ماحولياتي مداخلت
5.ريموٽ ڪنٽرول کي آن ڪرڻ کان اڳ,وصول ڪندڙ کي پهريان تي هلائڻ گهرجي,ريموٽ ڪنٽرول کي ٻيهر آن ڪريو
|
1.وصول ڪندڙ طاقت تي چيڪ ڪريو
2.وصول ڪندڙ اينٽينا کي انسٽال ڪريو,انسٽال ڪرڻ لاء برقي ڪئبنيٽ کان ٻاهر اينٽينا جي ٻاهرئين پڇاڙي کي انسٽال ڪريو
3.عام مفاصلي تي آپريشن
4.برقي ڪابينا جي وائرنگ کي فروغ ڏيو,رسيور اينٽينا جي وائرنگ کي 220V ۽ مٿين لائينن کان جيترو ٿي سگهي پري رکو. ② رسيور پاور سپلائي لاءِ هڪ آزاد سوئچنگ پاور سپلائي استعمال ڪرڻ جي ڪوشش ڪريو.,۽ پاور آئسوليشن ماڊل ۽ مقناطيسي انگوزي کي پاور ڪنڊ ۾ شامل ڪريو.,مداخلت واري قابليت کي وڌايو
|
|
ريموٽ ڪنٽرول کوليو ويو,چيڪ جي بيٽري ڏيکاريو
|
1.بيٽري پاور ناکافي بيٽري
2.بيٽري جي انسٽاليشن يا خراب رابطو
|
1.متبادل بيٽري
2.بيٽري جي انسٽاليشن چيڪ ڪريو,۽ ڇا بيٽري جي دٻي جي ٻنهي سرن تي ڌاتو جي چادر صاف ۽ غير ملڪي مادي کان پاڪ آهن,ان کي ڇڏي ڏنو
|
|
ريموٽ ڪنٽرول تي ڪجهه بٽڻ
يا سوئچ جواب نٿو ڏئي
|
1.سوئچ نقصان جي ناڪامي
2.وصول ڪندڙ کي نقصان جي غلطي
|
1.ڏسو جڏهن سوئچ کي ڦيرايو,ڇا ڊسپلي اسڪرين تي هڪ لاڳاپيل تير آهي؟;اتي هڪ تير ڏيکاريل آهي,اشارو ڪري ٿو ته سوئچ عام آهي;ڪوبه تير ڏيکاريل نه آهي مطلب ته سوئچ ڀڄي ويو آهي.,فيڪٽري بحالي جي واپسي
2.فيڪٽري بحالي جي واپسي
|
|
وصول ڪندڙ کان پوء طاقتور آهي,وصول ڪندڙ تي ڪابه روشني ناهي
|
1.بجلي جي فراهمي غيرمعمولي
2.پاور وائرنگ جي غلطي
3.وصول ڪندڙ ناڪامي
|
1.چيڪ ڪريو ته بجلي جي فراهمي وولٽيج آهي,ڇا وولٽيج گهرجن کي پورو ڪري ٿو
2.چيڪ ڪريو ته ڇا بجلي جي فراهمي جو مثبت ۽ منفي قطب ريورس ۾ ڳن are يل آهن
3.فيڪٽري بحالي جي واپسي
|
9.سار سنڀال ۽ سار سنڀال
1.مهرباني ڪري ڪمري جي حرارت تي ۽ دٻاء تي,خشڪ ماحول ۾ استعمال ڪيو ويو,سروس جي زندگي کي وڌايو。
2.مهرباني ڪري مينهن ۾ گندو ٿيڻ کان پاسو ڪريو、غير معمولي ماحول ۾ استعمال ڪيو ويو آهي جهڙوڪ بلين,سروس جي زندگي کي وڌايو。
3.مھرباني ڪري بيٽري جي خاني ۽ ڌاتو ڇڪڻ واري علائقي کي صاف رکو。
4.مھرباني ڪري ريموٽ ڪنٽرول کي نچڻ ۽ ڇڏڻ کان پاسو ڪريو، جيڪو نقصان جو سبب بڻجي سگھي ٿو.。
5.گهڻو وقت لاء استعمال نه ڪيو ويو آهي,مهرباني ڪري بيٽري ختم ڪريو,۽ ريموٽ ڪنٽرول ۽ بيٽري کي صاف ۽ محفوظ جڳھ تي اسٽور ڪيو。
6.اسٽوريج ۽ ٽرانسپورٽ دوران نمي جو ثبوت ۽ شاڪ پروف اسي ثبوت تي ڌيان ڏيو。
10.حفاظت جي ڄاڻ
1.مهرباني ڪري استعمال ڪرڻ کان پهريان تفصيل سان هدايتون پڙهو,غير پيشه ورانه اهلڪار ممنوع آهن。
2.مهرباني ڪري بيٽري کي وقت ۾ بدلايو جڏهن بيٽري تمام گهٽ آهي,ناڪامي بيٽري پاور جي ڪري غلطين کان بچڻ جو ريموٽ ڪنٽرول غير فعال ٿيڻ سبب.。
4.جيڪڏهن مرمت جي ضرورت آهي,مهرباني ڪري ڪارخاني سان رابطو ڪريو,جيڪڏهن پنهنجو پاڻ کي مرمت جي ڪري نقصان پهچايو,ڪاريگر وارنٽي فراهم نه ڪندو。
-500x650.png)



.png)
