
ওয়্যারলেস রিমোট কন্ট্রোল তারের করের স্বয়ংক্রিয় কাটিয়া
স্বয়ংক্রিয় কাটিয়া ওয়্যারলেস রিমোট কন্ট্রোল ওয়্যার সো মেশিন ডিএইচ 12 এস-পি 6 এস
বর্ণনা


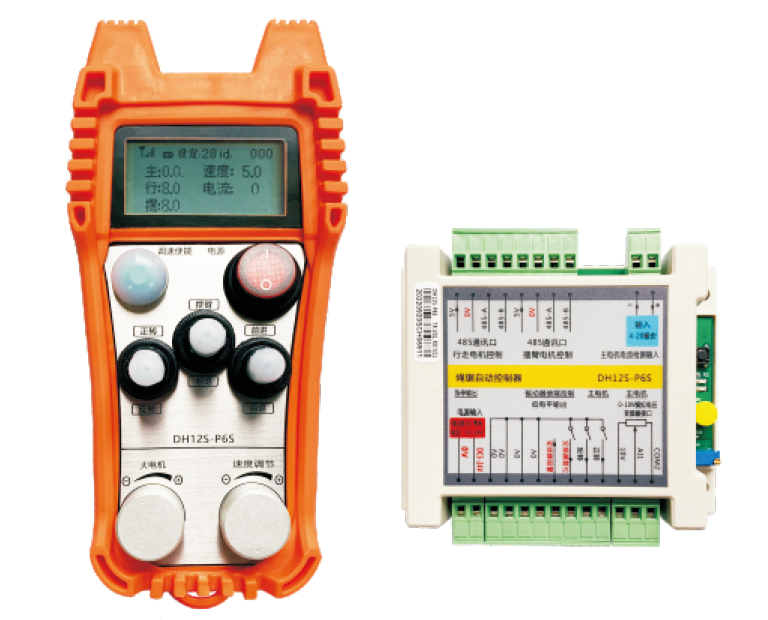
মডেল:DH12S-P6S অ্যাডাপ্টার সরঞ্জাম:ওয়্যার সো/ব্লেড সো মেশিন


মন্তব্য:তিন ধরণের অ্যান্টেনা নির্বাচন করা যেতে পারে,ডিফল্ট সাকশন কাপ অ্যান্টেনা স্ট্যান্ডার্ড সহ সজ্জিত


প্রধান মোটর গতি:হোস্ট:0-50
মোটর গতি হাঁটা:ঠিক আছে:0-50
স্বয়ংক্রিয় কাটিয়া হাঁটা মোটর সর্বাধিক গতির সীমা:গতি:0-30(প্যারামিটারগুলি সামঞ্জস্যযোগ্য)
স্বয়ংক্রিয় কাটিয়া মূল মোটর সেট বর্তমান:সেট আপ:28(প্যারামিটারগুলি সামঞ্জস্যযোগ্য)
সুইং আর্ম মোটর গতি:রাখুন:0-50

নিম্নচাপ:রিমোট কন্ট্রোলের ব্যাটারি খুব কম,ব্যাটারি প্রতিস্থাপন করুন

ইন্টারনেটের বাইরে পড়ে:ওয়্যারলেস সিগন্যাল বাধা,রিসিভার পাওয়ার সাপ্লাই পরীক্ষা করুন,আবার শক্তি,রিমোট কন্ট্রোল পুনরায় চালু করুন

1、রিমোট কন্ট্রোল চালু
রিসিভার চালিত হয়,রিসিভারে ডি 2 পাওয়ার সাপ্লাই লাইট সর্বদা চালু থাকে,D1信号灯开始闪烁;রিমোট কন্ট্রোলে দুটি নং 5 ব্যাটারি ইনস্টল করা হয়েছে,পাওয়ার স্যুইচ চালু করুন,প্রদর্শন মোটর গতি প্রদর্শন প্রদর্শন করুন,এর অর্থ স্টার্টআপ সফল。
2、主电机和调速
按住“调速使能”,ফরোয়ার্ডে "ফরোয়ার্ড/রিভার্স" স্যুইচ করুন,接收器主电机正转打开;
按住“调速使能”,ফরোয়ার্ডে "ফরোয়ার্ড/রিভার্স" স্যুইচ করুন,接收器主电机正转打开;
按住“调速使能”,বিপরীত দিকে "ফরোয়ার্ড/রিভার্স" স্যুইচটি ঘুরিয়ে দিন,接收器主电机反转打开;
直接将开关扳到中间或者反向,প্রধান মোটর তাত্ক্ষণিকভাবে থামে,এটি সক্ষম করতে গতি টিপানোর দরকার নেই;
"বড় মোটর" গিঁটটি ঘোরান,রিসিভার মেইন মোটর ইনভার্টারের গতি নিয়ন্ত্রণ ভোল্টেজ 0-10V সামঞ্জস্য করা যায়;
3、হাঁটা মোটর
3、হাঁটা মোটর
按住“调速使能”,"ফরোয়ার্ড/রিভার্স" চালু করুন এগিয়ে বা পিছনে স্যুইচ করুন,হাঁটার মোটর 50 এর উচ্চ গতিতে চলে যাবে;
4、সুইং আর্ম মোটর এবং গতি নিয়ন্ত্রণ
"সুইং আর্ম/রিটার্ন" সুইং আর্ম বা পিছনে স্যুইচ করুন,রিসিভারের সুইং আর্ম মোটর শুরু হয়;তারপরে "স্পিড অ্যাডজাস্টমেন্ট" নকটি ঘুরিয়ে দিন,সুইং আর্ম মোটরের গতি সামঞ্জস্য করতে পারে;
按住“调速使能”,"সুইং আর্ম/রিট্রিট" আবার স্যুইচ করুন,সুইং আর্ম মোটর উচ্চ গতিতে 50 এ চলে যাবে;
5、হাঁটা মোটর গতি সীমা সামঞ্জস্য
"স্পিড অ্যাডজাস্ট সক্ষম" বোতাম টিপুন এবং ধরে রাখুন,"স্পিড অ্যাডজাস্টমেন্ট" ঘোরানো স্বয়ংক্রিয় কাটার সময় হাঁটার মোটরের সর্বাধিক গতির সীমাটি সামঞ্জস্য করতে পারে;
6、স্বয়ংক্রিয় কাটিয়া
প্রথম পদক্ষেপ,প্রধান মোটর শুরু করুন;পদক্ষেপ 2,হাঁটার মোটরের সর্বাধিক গতির সীমাটি সামঞ্জস্য করুন;পদক্ষেপ 3,"ফরোয়ার্ড/রিভার্স" চালু করুন এগিয়ে বা পিছনে স্যুইচ করুন,স্বয়ংক্রিয় কাটিয়া মোড প্রবেশ করান;
7、প্যারামিটার সেটিংস (ব্যবহারকারীরা ব্যক্তিগত পরিবর্তন নিষিদ্ধ)
প্যারামিটার মেনু প্রবেশ করান:ম্যানুয়াল মোডে,যখন প্রধান মোটর গতি 0 হয়,ফরোয়ার্ড/রিভার্স স্যুইচ এক সারিতে 3 বার বেঁকে গেছে,তারপরে এটি পরপর 3 বার ভাঙ্গুন,প্যারামিটার মেনু প্রবেশ করান;
প্যারামিটার মেনু থেকে প্রস্থান করুন:গতি সামঞ্জস্য নোব পৃষ্ঠা টার্ন,সংরক্ষণ বা সংরক্ষণ করতে বেছে নিন,নিশ্চিত করতে সক্ষম বোতামটি টিপুন;
额定电流:主电机电流的最大值,单位安培;
গতি নিয়ন্ত্রণের পরামিতি:স্বয়ংক্রিয় কাটিয়া নিয়ন্ত্রণ পরামিতি,ডিফল্ট 800,单位毫秒,পরিবর্তন নিষিদ্ধ;
হ্রাস পরামিতি:যখন কাটিয়া বর্তমান পরিবর্তনের মান এই মানটি ছাড়িয়ে যায়,开始急速减速,单位安培;
ত্বরণ এ 1:যখন কাটিয়া স্রোত সেট কাটিয়া বর্তমানের চেয়ে কম থাকে,行走电机每次加速增加的速度值;
হ্রাস এ 2: যখন কাটিয়া স্রোত সেট কাটিয়া বর্তমানের চেয়ে বেশি হয়,হাঁটার মোটরটির গতির মান প্রতিবার হ্রাস পায় যখন এটি হ্রাস পায়;
সুইং আর্ম কারেন্ট:ডিফল্ট মান,পরিবর্তন নিষিদ্ধ;
সময় বন্ধ করুন:শাটডাউন পরে স্বয়ংক্রিয় মোড কারেন্ট ওভারলোড,কারেন্টটি একবারে একবারে আবার সনাক্ত করা হয়,যদি এটি সেট বর্তমানের চেয়ে কম হয়,স্বয়ংক্রিয়ভাবে হাঁটা মোটর শুরু করুন;ইউনিট সেকেন্ড,ডিফল্ট মান,পরিবর্তন নিষিদ্ধ;
সময় বন্ধ করুন:শাটডাউন পরে স্বয়ংক্রিয় মোড কারেন্ট ওভারলোড,কারেন্টটি একবারে একবারে আবার সনাক্ত করা হয়,যদি এটি সেট বর্তমানের চেয়ে কম হয়,স্বয়ংক্রিয়ভাবে হাঁটা মোটর শুরু করুন;ইউনিট সেকেন্ড,ডিফল্ট মান,পরিবর্তন নিষিদ্ধ;
সর্বাধিক বর্তমান:প্রধান মোটরটির প্রতিক্রিয়া বর্তমানের পরিসীমা,单位安培;
সর্বাধিক হোস্ট:রিমোট কন্ট্রোল মেইন মোটরের গতি নিয়ন্ত্রণ প্রদর্শন পরিসীমা;
সর্বাধিক হাঁটা:অবৈধ পরামিতি;
গতি সীমা অফসেট:স্বয়ংক্রিয়ভাবে কাটা যখন,রিমোট কন্ট্রোল ডিসপ্লেতে ট্র্যাভেল মোটরের গতির সীমা = এই প্যারামিটারের 50%;
সংবেদনশীলতা যুক্ত করুন:যখন মূল মোটরের প্রতিক্রিয়া বর্তমান বৃদ্ধি পায়,প্রতিবার মান বৃদ্ধি এই মান ছাড়িয়ে যায়,মোটর ত্বরণ হাঁটা;
সংবেদনশীলতা হ্রাস করুন:প্রধান মোটর প্রতিক্রিয়া বর্তমান হ্রাস,প্রতিবার মান হ্রাস এই মান ছাড়িয়ে যায়,হাঁটা মোটর ধীর হয়ে যায়;
সংবেদনশীলতা অফসেট:সংবেদনশীলতা পরামিতি যুক্ত এবং বিয়োগের অফসেট বৃদ্ধি;
বর্তমান সেট করুন:স্বয়ংক্রিয় কাটিয়া,মেইন মোটরের প্রতিক্রিয়া বর্তমানের জন্য প্রান্তিক,এই মানের চেয়ে বেশি,হাঁটার মোটরটি ধীর হতে শুরু করে;এই মানের নীচে,হাঁটার মোটর ত্বরান্বিত হতে শুরু করে;单位安培;
বর্তমান সেট করুন:স্বয়ংক্রিয় কাটিয়া,মেইন মোটরের প্রতিক্রিয়া বর্তমানের জন্য প্রান্তিক,এই মানের চেয়ে বেশি,হাঁটার মোটরটি ধীর হতে শুরু করে;এই মানের নীচে,হাঁটার মোটর ত্বরান্বিত হতে শুরু করে;单位安培;
খালি প্রস্থান:যখন স্বয়ংক্রিয় মোড শুরু হয়,মূল মোটরের প্রতিক্রিয়া বর্তমান যদি এই মানের চেয়ে কম হয়,খালি মোডে,এই মানের চেয়ে বড়,খালি মোড থেকে প্রস্থান করুন,কাটিয়া মোড প্রবেশ করান,单位安培;
কোন লোড বর্তমান:যখন স্বয়ংক্রিয় মোড শুরু হয়,মূল মোটরের প্রতিক্রিয়া বর্তমান যদি এই মানের চেয়ে কম হয়,কোন লোড মোডে,এই মানের চেয়ে বড়,নো-লোড মোড থেকে প্রস্থান করুন,কাটিয়া মোড প্রবেশ করান,单位安培;
সুইং গতি:সুইং আর্ম মোটরের প্রাথমিক গতি শুরু;
কাটিয়া মোড:ব্লেড করাত এবং তারের করাতের মধ্যে স্যুইচ করুন,প্যারামিটারগুলি স্যুইচ করার পরে, প্যারামিটারগুলি সেই অনুযায়ী স্যুইচও করা হবে।;ব্লেড সো মোডে,রিমোট কন্ট্রোল ডিসপ্লে সুইং আর্ম মোটর যুক্ত করে,তারের করাত মোডে কোনও সুইং মোটর নেই;
ডিবাউন সময়:যখন মূল মোটরটির প্রতিক্রিয়া বর্তমান স্টপ কারেন্টের চেয়ে বেশি হয়,প্রতিক্রিয়া কারেন্ট অবিচ্ছিন্নভাবে সনাক্ত করা হবে,ডিবাউন সময় এই অবিচ্ছিন্ন সনাক্তকরণের সময়কাল,এই সময়ের চেয়ে বেশি,মূল মোটর কারেন্টটি সনাক্ত করুন এখনও স্টপ কারেন্টের চেয়ে বেশি,হাঁটুনমোটর থামবে;অন্যথায়, হাঁটা মোটর এগিয়ে যেতে থাকবে;
বর্তমান বন্ধ করুন:মূল মোটরের প্রতিক্রিয়া বর্তমান এই মানটি ছাড়িয়ে গেছে,হাঁটা মোটর থামবে;单位安培;
অফসেট ডিফল্ট:যখন রিমোট কন্ট্রোল চালু হয় তখন এই মানের 50% = 50% চালু করা হয় তখন ভ্রমণ মোটরের গতির সীমাটির প্রাথমিক মান;
![]()
| রিসিভার অপারেটিং বিদ্যুৎ সরবরাহ |
ডিসি 24 ভি/1 এ (স্বতন্ত্র বিদ্যুৎ সরবরাহ)
|
| রিসিভার আউটপুট পয়েন্ট লোড | AC0-250V/3A DC0-30V/5A |
| রিসিভার স্পিড রেগুলেশন আউটপুট ভোল্টেজ | DC0-10V |

এই পণ্যটির ব্যাখ্যার চূড়ান্ত অধিকার Chengdu Core Synthetic Technology Co., Ltd-এর।。





