

Control a distància de tall automàtic de tall sense fils per a la serra de la corda de rastrejador
Track Car Rope Saw Tall Remote Control DH22S-LD-485
Descripció

1.Presentació del producte
El control remot de tall automàtic de la serra de filferro d'oruga és adequat per a les màquines de tall de la serra de filferro d'oruga,El protocol 485Modbus RTU s'utilitza per controlar l'inici de la regulació de la velocitat de l'inversor d'oruga esquerra i dreta i el control de direcció frontal, posterior, esquerra i dreta.,I comença la regulació de la velocitat del convertidor de freqüència del motor gran。I el corrent de treball del gran inversor del motor es pot llegir mitjançant el protocol 485-Modbus RTU,Anàlisi i comparació de grans corrents de motor,Ajusta automàticament les velocitats de la pista esquerra i dreta en temps real,Realitzeu la funció de tall automàtica。
2.Característiques del producte
1.Adopteu la tecnologia de comunicació sense fils de 433 MHz,Distància operativa sense fil 100 metres。
2.Adoptar la funció de salt automàtica de freqüència,Utilitzeu 32 conjunts de controls remots sense fils alhora,Sense efecte els uns sobre els altres。
3.Admet tots els convertidors de freqüència amb el protocol 485 modbus RTU,Les marques d'inversors adaptades actualment inclouen:Xangai Xielin、Fuji、Huichuan、Zhongchen、INVT、Yasukawa Tatsu。Si la marca no està adaptada, poseu-vos en contacte amb nosaltres per a la personalització.。
4.Admet la regulació de la velocitat del convertidor de freqüència del motor gran、posar en marxa、Lectura actual。
5.Admet l'ajust de velocitat de l'inversor d'oruga esquerra i dreta、posar en marxa、Controls davanters i posteriors esquerre i dret。
6.Admet la correcció lineal de l'inversor de rastreig esquerre i dret,Mantingueu la màquina en moviment en línia recta。
7.Suport de la funció de tall automàtic de la serra de filferro,Segons la informació de corrent del motor gran,Ajusta automàticament les velocitats de la pista esquerra i dreta en temps real。
8.També és compatible amb la sortida directa IO per controlar l'arrencada i l'aturada del motor.,La sortida de tensió analògica controla la velocitat del motor。
3.especificacions del producte
| Tensió de treball del terminal de mà i corrent | 2Bateria AA-3V/10mA |
| Tensió i corrent de funcionament del receptor | 24V/1A |
| Potència de transmissió de mà | 15dBm |
| El receptor rep sensibilitat | -100dBm |
| Freqüència de comunicació sense fils | 433MHZ Freencency Band |
| Temperatura de funcionament | -25℃<X<55℃ |
| Alçada anti-caiguda | Complir amb els estàndards nacionals de proves |
| Nivell impermeable | IP67 |
| Mida del producte | 225*84*58(mm) |
4.Presentació de la funció del producte
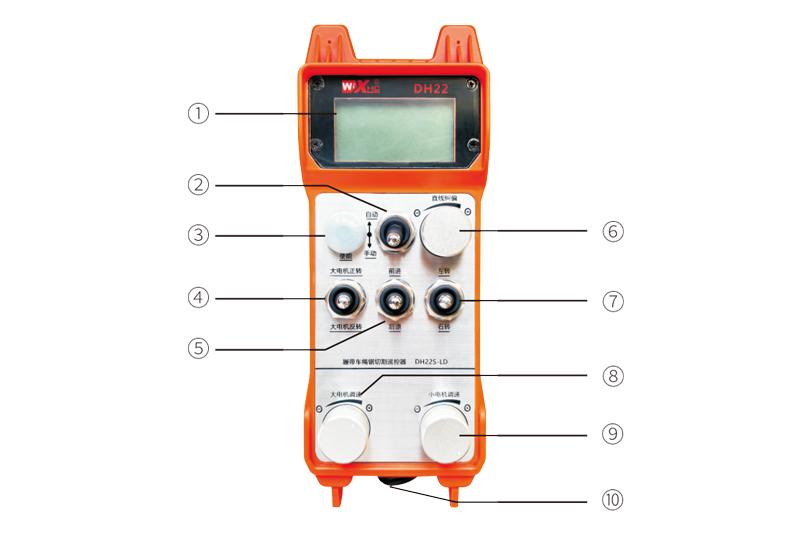
Comentaris:
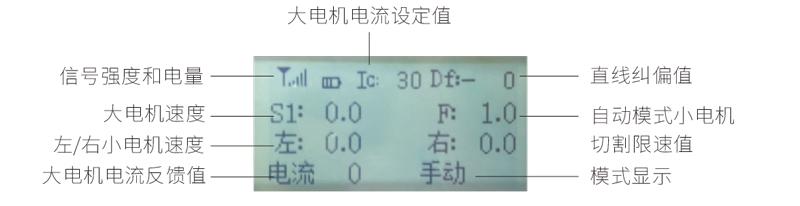
① Visualització de la pantalla:
② Interruptor de mode:
Adopta un interruptor de 2 velocitats,Pot canviar entre els modes automàtic i manual,Hi haurà un interruptor de visualització de mode corresponent a la pantalla.。
③Activa:
Botó de combinació,Algunes operacions requereixen mantenir premut el botó d'activació per funcionar,Consulteu la descripció de cada interruptor per obtenir més informació.。
④ Interruptor de motor gran:
Adopteu un interruptor de restabliment de 3 velocitats,gira aquest interruptor,Pot controlar la rotació cap endavant i inversa de motors grans,L'estat es mantindrà després de deixar anar,Hi haurà una pantalla corresponent a la pantalla,La fletxa S1↑ indica la rotació cap endavant,La fletxa S1↓ indica inversió。
⑤ Petit interruptor cap endavant/marrere del motor:
Adopteu un interruptor autoblocant de 3 velocitats,Premeu el botó d'activació + gireu l'interruptor,Pot controlar el petit motor per moure's cap endavant i cap enrere,Hi haurà una pantalla corresponent a la pantalla,↑↑Les fletxes indiquen cap endavant,↓↓La fletxa indica tornar enrere。
⑥ Correcció de desviació lineal:
Utilitzant la perilla del codificador multigir,Premeu el botó d'activació,Gireu el botó a la dreta,Pantalla de correcció de línia recta:Df:esquerre,Cada gir del botó augmenta en 1 unitat.,La velocitat del motor esquerre augmenta en 0,1 unitats;Gireu el botó a l'esquerra,Pantalla de correcció de línia recta:Df:dret,Cada gir del botó augmenta en 1 unitat.,La velocitat correcta del motor augmenta en 0,1 unitats。
⑦ Petit interruptor de gir del motor:
Adopteu un interruptor de restabliment de 3 velocitats,Gireu aquest interruptor en mode manual,Pot controlar un petit motor per girar a l'esquerra i a la dreta,El comandament a distància aturarà automàticament aquesta acció després de deixar anar.。En estat avançat,gira aquest interruptor,Hi haurà una pantalla corresponent a la pantalla,La fletxa ←↑ indica el gir a l'esquerra,↑→fletxa indica girar a la dreta。En estat de retirada,gira aquest interruptor,Hi haurà una pantalla corresponent a la pantalla,La fletxa ←↓ indica el gir a l'esquerra,↓→fletxa indica girar a la dreta。
⑧ Regulació de la velocitat del motor gran:
Utilitzant la perilla del codificador multigir,Gira 1 fotograma cada vegada,El gran valor de velocitat del motor canvia aproximadament 0,2 unitats,La rotació ràpida pot modificar ràpidament el gran valor de la velocitat del motor。
⑨Regulació de velocitat del motor petit:
Utilitzant la perilla del codificador multigir,En mode manual,Premeu el botó d'activació,A continuació, gireu 1 fotograma cada vegada,El valor de velocitat dels motors petits esquerre i dret canvia en aproximadament 0,1 unitats,La rotació ràpida pot modificar ràpidament el valor de velocitat del motor petit。En mode automàtic,Premeu el botó d'activació,A continuació, gireu 1 fotograma cada vegada,El valor límit de velocitat del motor petit F canvia aproximadament 0,1 unitats,La rotació ràpida pot modificar ràpidament el valor límit de velocitat dels motors petits。
⑩ Interruptor d'alimentació de control remot:
Encès de la pantalla del comandament a distància。
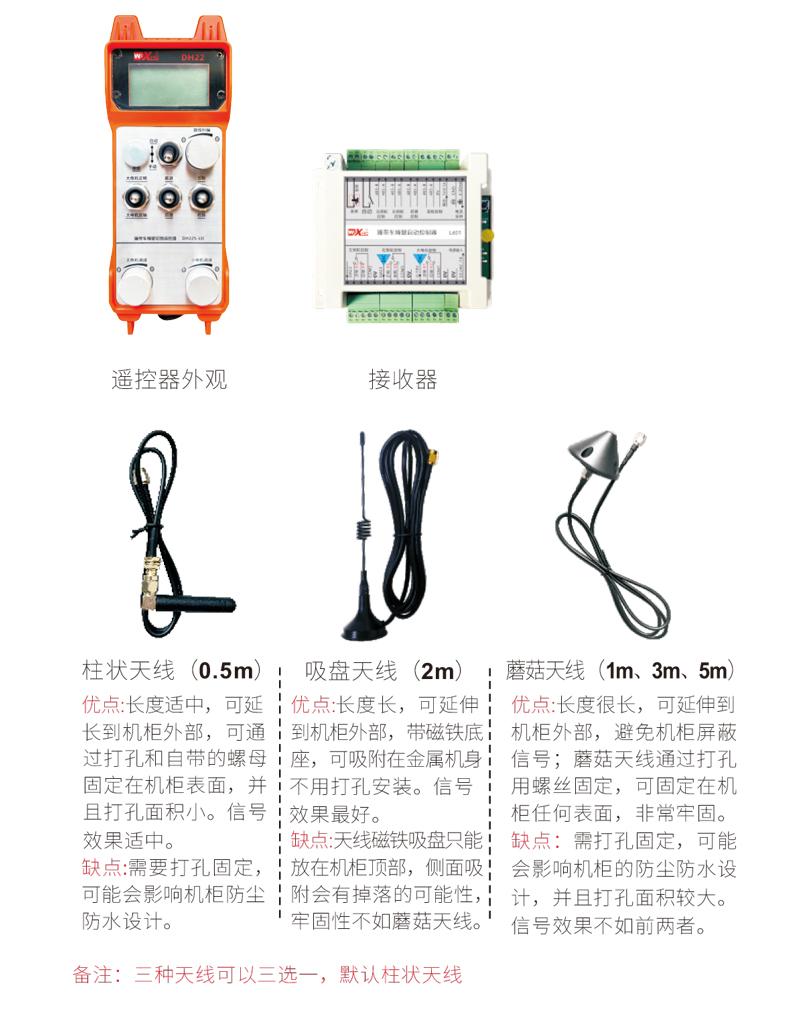
5.Diagrama d'accessoris del producte
6.Guia d'instal·lació del producte
6.1Passos d’instal·lació del producte
6.1Passos d’instal·lació del producte
1.Instal·leu el receptor a l’armari elèctric a través de l’enganxament a la part posterior,O instal·leu -lo a l’armari elèctric a través dels forats del cargol a les quatre cantonades del receptor.。
2.Consulteu el nostre diagrama de cablejat del receptor,Compareu els vostres equips in situ,Connecteu el dispositiu al receptor mitjançant cables。
3.Un cop arreglat el receptor,L’antena equipada amb el receptor s’ha de connectar,I instal·leu l'extrem exterior de l'antena o poseu -la fora de l'armari elèctric,Es recomana col·locar el senyal a la part superior de l’armari elèctric.,No es permet desconnectar l'antena,o voluntat
L'antena es col·loca dins de l'armari elèctric,Pot fer que el senyal sigui inutilitzable。
4.Finalment, instal·leu les piles al comandament a distància,Premeu la tapa de la bateria,A continuació, engegueu l'interruptor d'alimentació del comandament a distància,La pantalla del control remot mostrarà la interfície de treball normal.,Podeu realitzar operacions de control remot。
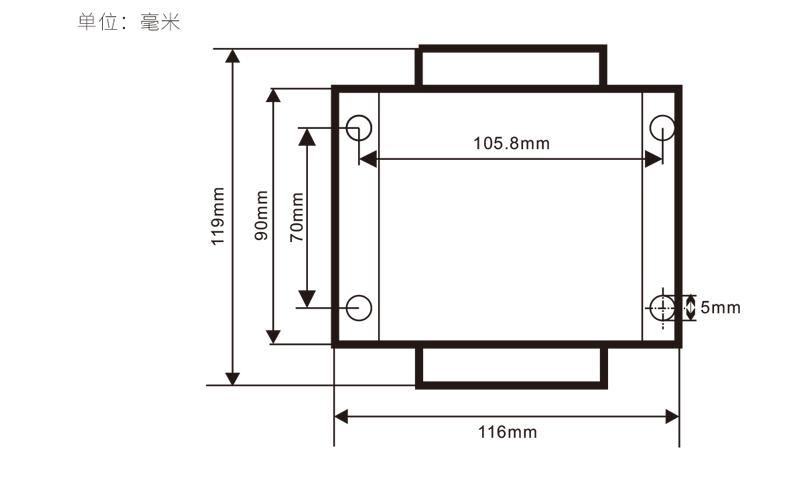
6.2Mida de la instal·lació del receptor
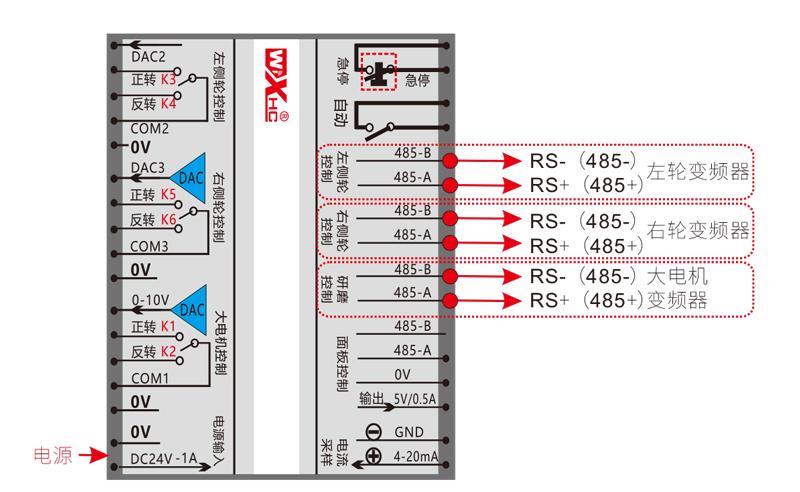
6.3Diagrama de referència del cablejat del receptor
7.Instruccions de funcionament del producte
7.1Configuració dels paràmetres del control remot
Introduïu el mètode de paràmetre de fons del control remot:Mou el commutador de mode al mode manual,La velocitat del motor petit s'ajusta a 25 a l'esquerra i a la dreta,O tots dos són 0、10、20、40、50,Estireu l'interruptor de rotació cap endavant del motor gran 3 vegades seguides cap amunt,Tireu cap avall 3 vegades seguides;
Utilitzeu el botó "Ajust de velocitat del motor petit" per passar les pàgines,Després de prémer activar, gireu el botó de control de velocitat del motor petit per modificar els paràmetres.;
Després de la modificació,Gira la pàgina fins al final,Seleccioneu Desa i Surt,Premeu el botó d'activació per sortir del menú;
Els paràmetres són els següents:
Corrent màxim:Gran rang de valors de retroalimentació de corrent del motor,Interval de configuració 15-200A,Per defecte 100;
Paràmetres de regulació de velocitat:El motor petit en mode automàtic accelera automàticament la velocitat,Com més petit, més ràpid,Interval de configuració 200-1500,800 per defecte;
Paràmetres de desacceleració:Establiu el límit superior per als canvis de velocitat del motor permesos,Quan el canvi actual supera aquest valor,disminuirà la velocitat。
El més petit,Els motors esquerre i dret es desacceleren més ràpidament,Interval 05-12,Per defecte 06;
Acceleració A1:Com més gran és el motor, més ràpid augmenta la velocitat.,Interval 00-06,Per defecte 01;
Desacceleració A2:Com més gran sigui la velocitat del motor, més ràpid disminuirà.,Interval 00-06,Per defecte 02;
Activa l'ajust de velocitat:Cal prémer Habilita per ajustar la velocitat dels motors petits?,00Desactivar,01habilitar,Per defecte 01;
Comença a bloquejar-se:El motor gran mantindrà automàticament el bloqueig automàtic després de deixar anar l'interruptor cap endavant i cap enrere?,00no mantenir,01Mantenir,Per defecte 01;
Màxim caminant:Velocitat màxima dels motors esquerre i dret,Interval 10-100,Per defecte 50;
Corrent de tall:Corrent màxima de tall,La pantalla mostra el valor IC,Interval 15-160,Per defecte 30,Pantalla IC de visualització corresponent:30。El límit superior d'aquest paràmetre = corrent màxim x80%;
Límit de velocitat per defecte:La velocitat de tall automàtic del motor petit per defecte a l'inici,Interval 00-100,Per defecte 10,La pantalla mostrarà corresponentment F1.0,Aquest paràmetre només és precís quan la caminada màxima s'estableix en 50。
Mode automàtic:Estableix a 00,El commutador automàtic/manual és un commutador de mode,Posa a 01,Gireu l'interruptor automàtic/manual a la posició automàtica,Il·luminació de la pantalla,Tancament automàtic de la sortida del terminal al receptor,Premeu el manual,Desconnexió automàtica del terminal de sortida;
Desplaçament del límit de velocitat:Límit superior de velocitat de tall automàtic del motor petit,Interval 00-200,Per defecte 60,La pantalla correspon a la pantalla 6.0;Límit superior del valor de visualització = compensació del límit de velocitat × 0,1;
Host màxim:Velocitat màxima del motor gran,Interval 10-100,Per defecte 50;
dispositiu mbus (obligatori):Selecció de models d'inversor de motor gran,Interval 00-03,Per defecte 03;
00-Xangai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
dispositiu sbus (obligatori):Selecció de model d'inversor de motor petit,Interval 00-05,Per defecte 03;
00-Xangai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
04-Yaskawa Da 05-Cap
7.2Configuració de paràmetres del convertidor de freqüència
1.Selecció de la font d'ordres:Canal de comandament de comunicació
2.Selecció de la font de freqüència principal:comunicació donada
3.velocitat de transmissió:19200
4.Format de dades:Sense suma de comprovació,Format de dades<8-N-1>
5.Adreça local:El convertidor de freqüència esquerre està configurat en 1,El convertidor de freqüència correcte està configurat en 2,L'inversor de motor gran està configurat en 3
7.3Instruccions de funcionament del comandament a distància
1.La màquina està alimentada,Control a distància encès,Introduïu el fons del comandament a distància,Establiu els paràmetres de fons del comandament a distància,principal
Es tracta de configurar els models d'inversor de motors petits i grans (ometeu aquest pas si el fabricant de la màquina l'ha configurat);
2.Establiu els paràmetres de l'inversor (ometeu aquest pas si els ha establert el fabricant de la màquina);
3.Canvieu el comandament a distància al mode manual,A continuació, utilitzeu el comandament a distància per moure la màquina a la posició de treball;
4.En mode manual,Establiu el valor de configuració del corrent de tall del motor gran IC,Establiu la velocitat màxima del motor;
5.Canvia al mode automàtic,Establiu el valor F del límit de velocitat de tall del motor petit;
6.En mode automàtic,Gireu l'interruptor del motor gran per endavant per engegar el motor gran,A continuació, gireu l'interruptor del motor petit a
Marxa endavant o enrere,El comandament a distància entra en mode de tall automàtic,Començar a tallar。
8.Resolució de problemes del producte
| Situació de falla | Possible causa |
Mètodes de resolució de problemes
|
|
Premeu l'interruptor d'alimentació,
No es pot activar i desactivar,
La pantalla no s’il·lumina
|
1.La bateria no està instal·lada al comandament a distància
O la direcció de la bateria s’instal·la de manera incorrecta
2.Potència de bateria insuficient
3.Falla de control remot
|
1.Comproveu la instal·lació de la bateria del comandament a distància
2.Bateria de substitució
3.Poseu -vos en contacte amb el fabricant per tornar a la fàbrica per al manteniment
|
|
Control a distància encès,
Mostra l'interrupció de la xarxa i la parada d'emergència!
Si us plau, torna-ho a provar!
|
1.El receptor no està alimentat
2.L’antena del receptor no s’instal·la
3.La distància entre el comandament remot i la màquina és massa llunyana
4.Interferència ambiental
5.Abans d'encendre el comandament a distància,El receptor s'ha d'encendre primer,Torneu a encendre el comandament a distància
|
1.Comproveu la potència del receptor
2.Instal·leu l'antena del receptor,Instal·leu l'extrem exterior de l'antena fora de l'armari elèctric per arreglar -lo
3.Funcionament a distància normal
4.① Optimitzar el cablejat del gabinet elèctric,Mantingueu el cablejat de l'antena del receptor el més lluny possible de les línies de 220 V i superiors. ② Intenteu utilitzar una font d'alimentació de commutació independent per a la font d'alimentació del receptor.,I afegiu un mòdul d'aïllament de potència i un anell magnètic al cable d'alimentació.,Augmentar la capacitat anti-interferència
|
|
Control a distància encès,mostrar la càrrega de la bateria
|
1.Potència de bateria insuficient
2.Instal·lació de la bateria o mal contacte
|
1.Bateria de substitució
2.Comproveu la instal·lació de la bateria,I si les làmines metàl·liques dels dos extrems del compartiment de la bateria estan netes i lliures de matèria estranya,Netegeu -lo
|
|
Alguns botons del comandament a distància
O l'interruptor no respon
|
1.Falla de dany de l'interruptor
2.Falla de dany del receptor
|
1.Observeu quan accioneu l'interruptor,Hi ha una fletxa corresponent a la pantalla?;Es mostra una fletxa,Indica que l'interruptor és normal;No es mostra cap fletxa significa que l'interruptor està trencat.,Tornar al manteniment de la fàbrica
2.Tornar al manteniment de la fàbrica
|
|
Després que el receptor s’encengui,Sense llum al receptor
|
1.Anormalitat de subministrament elèctric
2.Error de cablejat de potència
3.Fallada del receptor
|
1.Comproveu si l’alimentació té tensió,La tensió compleix els requisits
2.Comproveu si els pols positius i negatius de l’alimentació estan connectats al revés
3.Tornar al manteniment de la fàbrica
|
9.Manteniment i cura
1.Si us plau, a temperatura i pressió,Utilitzat en entorns secs,Ampliar la vida del servei。
2.Eviteu mullar -vos sota la pluja、S'utilitza en entorns anormals com ara butllofes,Ampliar la vida del servei。
3.Si us plau, mantingueu nets el compartiment de la bateria i la zona de la metralla metàl·lica。
4.Si us plau, eviteu prémer i deixar caure el comandament a distància, que pot causar danys.。
5.No s’utilitza durant molt de temps,Traieu la bateria,I emmagatzemar el control remot i la bateria en un lloc net i segur。
6.Fixeu-vos en la prova de la humitat i la prova de xoc durant l’emmagatzematge i el transport。
10.informació de seguretat
1.Llegiu les instruccions per utilitzar -les en detall abans de l’ús,El personal no professional està prohibit。
2.Substituïu la bateria a temps quan la bateria és massa baixa,Eviteu errors causats per una bateria insuficient que fa que el comandament a distància no funcioni.。
4.Si es requereix reparació,Poseu -vos en contacte amb el fabricant,Si els danys causats per l’auto-reparació,El fabricant no proporcionarà cap garantia。
.png)

.png)


