
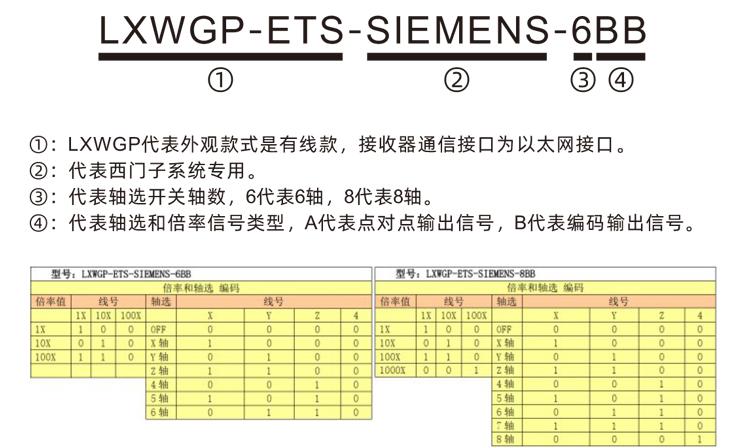
Volant electrònic amb cable LXWGP-ETS-SIEMENS
Descripció


El volant electrònic s'utilitza per guiar manualment les màquines-eina CNC、posició、Funcionament de vaga。Aquest model de volant electrònic és un volant electrònic amb cable de Siemens amb pantalla real.,El volant està connectat a la interfície X130 del sistema Siemens mitjançant un cable de xarxa.,Llegiu les coordenades del sistema i visualitzeu-les a la pantalla LCD del volant mitjançant la comunicació del protocol S7.,I la selecció de l'eix del sistema de control del volant es pot fer mitjançant la comunicació.、ampliació、Botó i altres senyals。

1.Connectat mitjançant un cable d'endoll d'aviació de 6 nuclis,Longitud del cable del volant 10 metres。
2.La pantalla del volant pot mostrar les coordenades de la peça del sistema、Coordenades mecàniques、Velocitat d'alimentació、Selecció d'eix、Informació com l'ampliació。
3.Botó d’aturada d’emergència de suport,Sortida de senyal de commutació io Senyal,La parada d'emergència d'apagada del volant continua sent efectiva。
4.Admet 6 botons personalitzats,Senyal de commutació IO,Pot enviar senyals al sistema mitjançant cablejat IO o comunicació。
5.Admet control de 6 o 8 eixos,Senyal de commutació IO,Pot enviar senyals al sistema mitjançant cablejat IO o comunicació。
6.Admet 3 o 4 nivells de control d'ampliació,Senyal de commutació IO,Pot enviar senyals al sistema mitjançant cablejat IO o comunicació。
7.Codificador de pols de suport,100Pols/cercle,El senyal es pot enviar al sistema mitjançant cablejat de pols AB.。
8.Suport al protocol Siemens S7,Suport a Siemens 828D、840DSL、ONE i altres sistemes model。

| Tensió d'alimentació de funcionament del volant | DC24V/1A |
| Tensió d’alimentació d’alimentació del receptor | DC24V/1A |
| Interval de càrrega de sortida del receptor IO |
DC24V
|
| Longitud del cable de l'extrem del volant |
10m
|
| Longitud del cable de l'extrem del receptor |
1m
|
| Longitud del cable de xarxa de l'extrem del receptor |
3m
|
| Temperatura de funcionament |
-25℃<X<55℃
|
| Alçada anti-caiguda |
1m
|
| Personalitzeu el nombre de botons | 6indivual |
| Mida del producte | 233*90.7*77.4(mm) |


Comentaris:
① Botó d’aturada d’emergència:
Premeu el botó d'aturada d'emergència,Es desconnecten dos grups de sortides d’emergència de parada d’emergència al receptor,I totes les funcions de la roda de mà no són vàlides。
Un cop alliberada la parada d’emergència,La sortida IO de parada d’emergència es va tancar al receptor,Totes les funcions de la roda de mà es restableixen。
② Pantalla de pantalla:
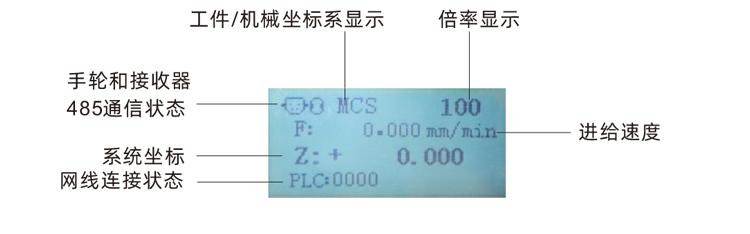
PLC:0000Significa que el cable de xarxa no està connectat,PLC:1010Significa que el cable de xarxa i el sistema PLC estan connectats correctament.,
PLC:1110Indica que el volant escriu les dades del sistema correctament.,PLC:0001Indica una connexió correcta a l'ordinador。
③ Botons d’escustom:
6Botons personalitzats,Cada botó correspon a un punt de sortida IO del receptor,També connectat al sistema mitjançant comunicació。
④Axis Interruptor de selecció:
Commutació de l'interruptor de selecció de l'eix pot canviar l'eix mòbil controlat pel rodó de mà。
⑤ Botó Habilita:
Premeu i manteniu premut qualsevol botó Habilitar a banda i banda,El codificador de pols balancí és efectiu。 I els dos grups del receptor permeten la conducció de sortida io,Allibereu el botó Habilitar,Activa la desconnexió de sortida IO。
⑥ Interruptor d'ampliació:
Canvieu l’interruptor d’ampliació per canviar la ampliació controlada per la roda de mà。
⑦ Codificador de polsos:
Premeu i manteniu premut el botó Habilitar,Codificador de pols sacsejades,Envieu un senyal de pols,Controleu el moviment de l’eix de la màquina。
⑧Cable del volant manual:
Cable que connecta volant i receptor,endoll d'aviació,Per a l'alimentació i la comunicació del volant。



6.1Passos d’instal·lació del producte
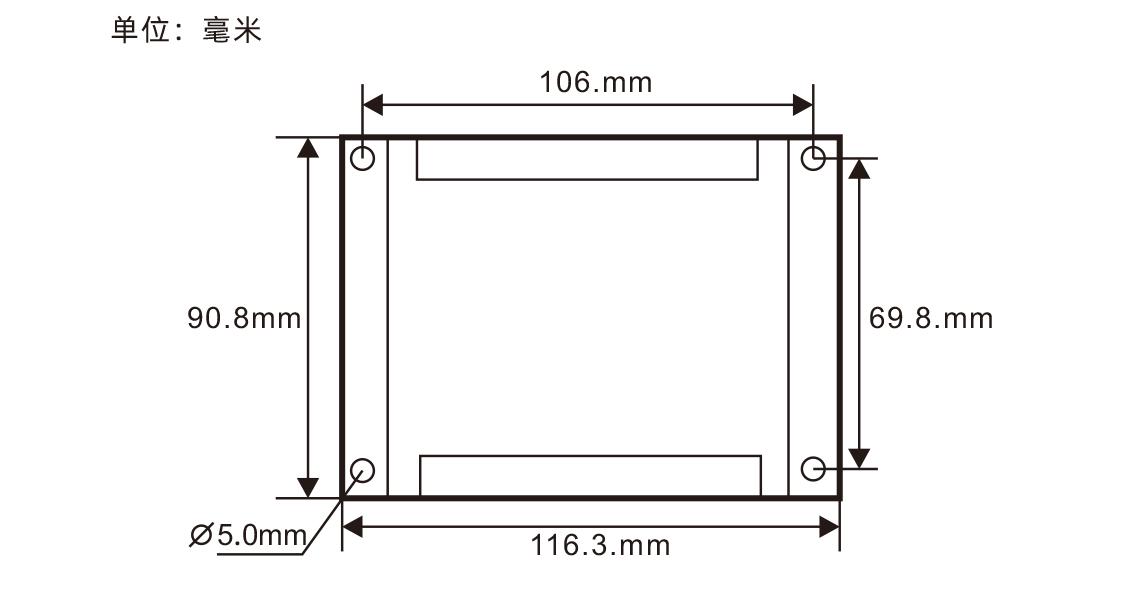
1.Instal·leu el receptor a l'armari elèctric a través dels forats dels cargols a les quatre cantonades.。
2.Consulteu el nostre diagrama de cablejat del receptor,Compareu els vostres equips in situ,Connecteu el dispositiu mitjançant el cable i el receptor
connectar,Utilitzeu un cable de xarxa per connectar el receptor a la interfície X130 del sistema。
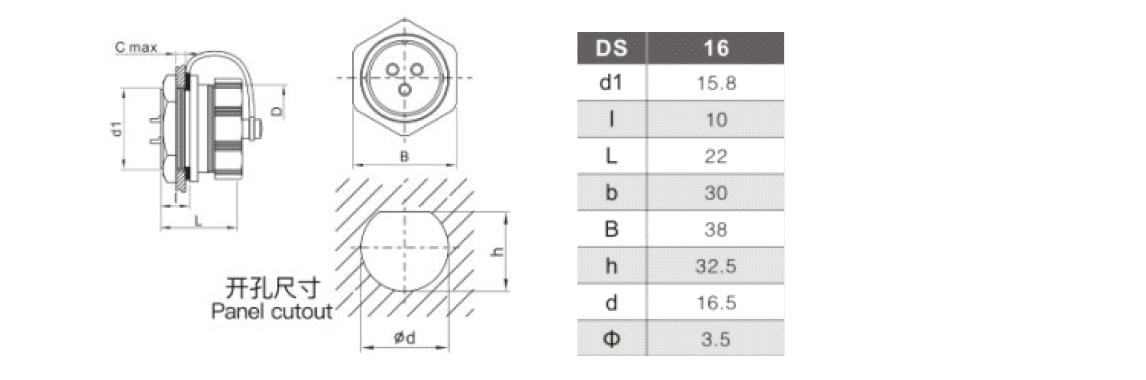
3.Un cop arreglat el receptor,Instal·leu la base de l'endoll d'aviació a l'obertura del volant del panell,Una altra base
La regleta de terminals està connectada a la interfície del volant del receptor.。A continuació, inseriu l'endoll d'aviació del cable de l'extrem del volant manual a la base,Apretar
accessoris。
6.2Mida de la instal·lació del receptor
6.3Dimensions d'instal·lació de l'endoll d'aviació
6.4Diagrama de referència del cablejat del receptor

6.2Mida de la instal·lació del receptor
6.3Dimensions d'instal·lació de l'endoll d'aviació
6.4Diagrama de referència del cablejat del receptor

1.El receptor està alimentat,El llum de funcionament del receptor està encès,Connecteu el receptor a l'ordinador mitjançant un cable de xarxa,Establiu una adreça IP fixa per al vostre ordinador,Utilitzeu el programari de l'eina de configuració de xarxa per establir els paràmetres de xarxa per a la funció de volant,Configuracions específiques
Per obtenir el mètode, consulteu "Instruccions per a l'ús del volant amb cable LXWGP-ETS"。
2.Un cop finalitzada la configuració del receptor,El sistema requereix programació del programa PLC,Per obtenir més informació, consulteu "Mètodes de configuració LXWGP-ETS per a diferents sistemes CNC de Siemens" i informació sobre la rutina del programa PLC。
3.Un cop completada la configuració anterior,Porteu el receptor a l'armari elèctric de la màquina i instal·leu-lo,Desconnecteu el cable de xarxa de l'ordinador i connecteu-lo a la interfície X130 del sistema,Connecteu els cables d'alimentació i polsos del receptor。
4.La màquina està alimentada,El receptor està alimentat,El llum de funcionament del receptor està encès,Enceneu l'interruptor d'alimentació del volant manual,Bota de pantalla de volant,Pantalla de visualització PLC:1010,Indica una comunicació correcta entre el volant i el sistema.。
5.Seleccioneu la selecció d'eix:Interruptor de selecció de l'eix de commutació,Seleccioneu l'eix que vulgueu operar。
6.Seleccioneu el multiplicador:Canvieu l'interruptor d'ampliació,Seleccioneu el multiplicador que necessiteu。
7.Mou l'eix:Premeu i manteniu premut el botó Habilitar,Seleccioneu l'eix i el commutador,Seleccioneu el commutador multiplicador,A continuació, gireu el codificador de pols,Gira en sentit horari de l’eix de moviment cap endavant,Gireu l’eix de moviment negatiu en sentit antihorari。
8.Premeu i manteniu premut qualsevol botó personalitzat,El botó corresponent io la sortida del receptor està activat,Sortida del botó de llançament Tanca。
9.Premeu el botó d'aturada d'emergència,El receptor desconnecta la sortida d'emergència io,La funció de les rodes de mà falla,Allibera el botó Stop Emergency Stop,STOP EMERGÈNCIA IO Sortida tancada,Recuperació de la funció de rodes de mà。


| Situació de falla | Possible causa |
Mètodes de resolució de problemes
|
|
|
Mètodes de resolució de problemes
|
1.Si el cable d'aviació entre el volant i el receptor està connectat correctament i de manera fiable
2.La tensió d'alimentació del receptor és suficient?
3.Falla de rodes de mà
|
1.Comproveu la connexió del cable d'aviació entre el volant i el receptor
2.Comproveu la potència d'entrada del receptor
3.Poseu -vos en contacte amb el fabricant per tornar a la fàbrica per al manteniment
|
|
| No hi ha resposta en operar el volant |
1.Els cables de xarxa entre el receptor i el sistema estan connectats?
2.El programa PLC del sistema està ben escrit?
3.La configuració del receptor està configurada correctament?
4.La icona de comunicació 485 que es mostra a la pantalla del volant ha fallat?
5.En operar la roda de mà,Heu de prémer i mantenir premuts els botons d'activació dels dos costats
6.S'ha deixat anar el botó d'aturada d'emergència?
|
1.Comproveu si el receptor i el port de xarxa X130 del sistema estan connectats amb un cable de xarxa
2.Comproveu i confirmeu si el PLC del sistema està escrit segons els materials de referència que hem proporcionat.
3.Comproveu si el receptor fa referència a la nostra informació i al programari de l'eina proporcionat,Establiu correctament els paràmetres de xarxa i l'adreça de base de dades del receptor, etc.
4.Comproveu entre el volant i el receptor
6endoll verd central,Dues de les línies de comunicació:485-A i 485-B,Està connectat correctament i de manera segura?,Hi ha alguna interrupció del circuit?
|
|
|
Després que el receptor s’encengui,El llum de treball del receptor no s'encén
|
1.Anormalitat de subministrament elèctric
2.Error de cablejat de potència
3.Fallada del receptor
|
1.Comproveu si l’alimentació té tensió,
La tensió compleix els requisits
2.Comproveu si els pols positius i negatius de l’alimentació estan connectats al revés
3.Tornar al manteniment de la fàbrica
|

1.Si us plau, a temperatura i pressió,Utilitzat en entorns secs,Ampliar la vida del servei。
2.Eviteu mullar -vos sota la pluja、S'utilitza en entorns anormals com ara butllofes,Ampliar la vida del servei。
3.Mantingueu la roda de mà neta,Ampliar la vida del servei。
4.Eviteu la presa、Caure、Colpejar, etc.,Eviteu que els accessoris de precisió dins del rodó de mà es produeixin danys o errors de precisió。
5.No s’utilitza durant molt de temps,Guardeu la roda de mà en un lloc net i segur。
6.Fixeu-vos en la prova de la humitat i la prova de xoc durant l’emmagatzematge i el transport。

1.Llegiu les instruccions per utilitzar -les en detall abans de l’ús,El personal no professional està prohibit。
2.Després que es produeixi qualsevol situació anormal al volant,Si us plau, deixeu d'utilitzar-lo immediatament,i solucionar problemes,Abans de solucionar problemes,Està prohibit tornar a utilitzar el volant defectuós,Eviteu accidents de seguretat a causa de fallades desconegudes del volant;
3.Si es requereix reparació,Poseu -vos en contacte amb el fabricant,Si els danys causats per l’auto-reparació,El fabricant no proporcionarà cap garantia。
-500x650.png)




