
Comandament a distància sense fil de tall automàtic de la serra de filferro
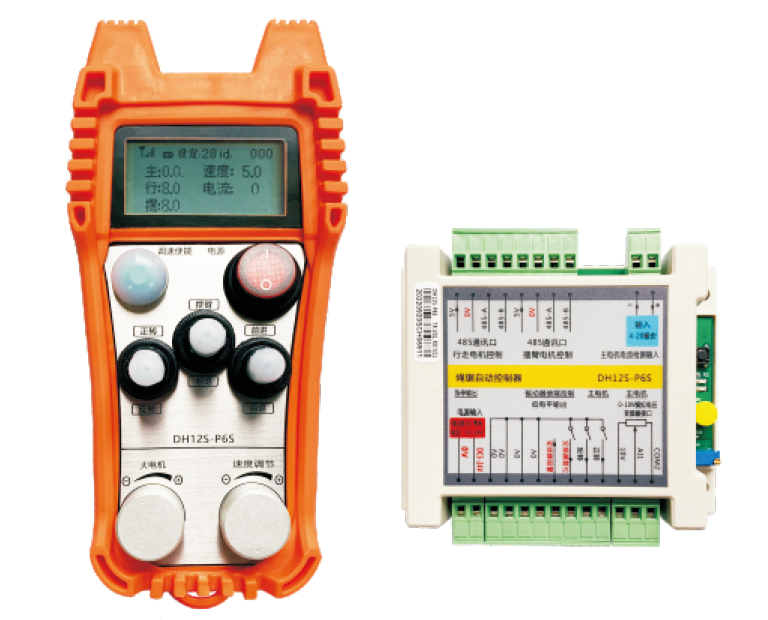
Control a distància automàtic de tall sense fils de la màquina de serra de filferro DH12S-P6S
Descripció


model:Equip adaptador DH12S-P6S:Serra de filferro / màquina de serra de fulla


Observar:Es poden seleccionar tres tipus d’antenes,L’antena de tassa d’aspiració predeterminada està equipada amb estàndard


Velocitat del motor principal:amfitrió:0-50
Velocitat del motor de desplaçament:D'acord:0-50
Límit màxim de velocitat del motor de viatge de tall automàtic:velocitat:0-30(Els paràmetres són regulables)
Corrent de configuració del motor principal de tall automàtic:configurar:28(Els paràmetres són regulables)
Velocitat del motor del braç basculant:posar:0-50

Baixa pressió:La bateria del comandament a distància és massa baixa,Substituïu la bateria

Cau de Internet:Interrupció del senyal sense fils,Comproveu l'alimentació del receptor,Potència de nou,Reinicieu el control remot

1、Control a distància encès
El receptor està alimentat,La llum d'alimentació D2 del receptor està sempre encesa,La llum de senyal D1 comença a parpellejar;Dues bateries núm. 5 instal·lades al comandament a distància,Engegueu l’interruptor d’alimentació,Visualització de la velocitat del motor,Significa que la startup té èxit。
2、Motor principal i regulació de velocitat
Manteniu premut "Activa el control de velocitat",Gireu el commutador "Forward/Reverse" a Forward,El motor principal del receptor gira cap endavant i s'encén;
Manteniu premut "Activa el control de velocitat",Gireu el commutador "Forward/Reverse" a Forward,El motor principal del receptor gira cap endavant i s'encén;
Manteniu premut "Activa el control de velocitat",Gireu el commutador "Forward/Reverse" a la inversa,El motor principal del receptor inverteix i s'encén;
Simplement moveu l'interruptor al centre o al revés,El motor principal s'atura immediatament,No cal prémer el control de velocitat per activar-lo;
Gireu el botó "Big Motor".,La tensió de regulació de velocitat de l'inversor del motor principal del receptor es pot ajustar 0-10V;
3、Motor de viatge
3、Motor de viatge
Manteniu premut "Activa el control de velocitat",Moveu l'interruptor "davant/marrere" cap endavant o cap enrere,El motor que camina es mourà a una velocitat alta de 50;
4、Motor de braç basculant i regulació de velocitat
Gireu l'interruptor "Swing Bra/Reverse" al braç oscil·lant o al revés,S'engega el motor del braç basculant del receptor;A continuació, gireu el botó "Ajust de velocitat".,La velocitat del motor del braç basculant es pot ajustar;
Manteniu premut "Activa el control de velocitat",A continuació, gireu l'interruptor "braç oscil·lant/marxa enrere".,El motor del braç oscil·lant es mourà a una velocitat elevada de 50;
5、Ajust del límit de velocitat del motor de viatge
Manteniu premut el botó "Activació de velocitat".,Gireu "Ajust de velocitat" per ajustar el límit de velocitat màxim del motor de desplaçament durant el tall automàtic.;
6、Tall automàtic
Primer pas,Engegueu el motor principal;Pas 2,Ajusteu el límit de velocitat màxim del motor de desplaçament;Pas 3,Gireu l'interruptor "davant/marrere" per avançar o cap enrere,Introduïu el mode de tall automàtic;
7、Configuració dels paràmetres (els usuaris no poden modificar-los de manera privada)
Introduïu el menú de paràmetres:En mode manual,Quan la velocitat del motor principal és 0,L’interruptor revertit/inversa està doblat 3 vegades seguit,A continuació, trenqueu -lo 3 vegades seguides,Introduïu el menú de paràmetres;
Surt del menú de paràmetres:Perilla d'ajust de velocitat girant pàgina,Trieu desar o no desar,Confirmeu prement el botó d'activació;
Corrent nominal:Valor màxim del corrent del motor principal,Unitat Amperi;
Paràmetres de regulació de velocitat:Paràmetres de control automàtic de tall,800 per defecte,Unitat de mil·lisegon,Està prohibida la modificació;
Paràmetres de desacceleració:Quan el valor de canvi de corrent de tall supera aquest valor,Comença a desaccelerar ràpidament,Unitat Amperi;
Acceleració A1:Quan el corrent de tall és inferior al corrent de tall de conjunt,El valor de la velocitat augmenta per cada acceleració del motor que camina;
Desacceleració A2: Quan el corrent de tall és superior al corrent de tall de conjunt,El valor de velocitat reduït per cada desacceleració del motor que camina;
Corrent de braç oscil·lant:valor per defecte,Està prohibida la modificació;
aturar el temps:Després de l'apagada per sobrecàrrega actual en mode automàtic,Comproveu el corrent de nou després d'un període de temps,Si és inferior al corrent establert,Engegueu automàticament el motor de marxa;Unitat segona,valor per defecte,Està prohibida la modificació;
aturar el temps:Després de l'apagada per sobrecàrrega actual en mode automàtic,Comproveu el corrent de nou després d'un període de temps,Si és inferior al corrent establert,Engegueu automàticament el motor de marxa;Unitat segona,valor per defecte,Està prohibida la modificació;
Corrent màxim:Interval de corrent de retroalimentació del motor principal,Unitat Amperi;
Host màxim:Interval de visualització de velocitat del motor principal del control remot;
Màxim caminant:El paràmetre no és vàlid;
Desplaçament del límit de velocitat:En tallar automàticament,El control remot mostra el límit de velocitat del motor a peu = 50% d'aquest paràmetre;
Afegeix sensibilitat:Quan augmenta el corrent de retroalimentació del motor principal,Cada cop el valor augmenta més enllà d'aquest valor,Acceleració del motor de viatge;
Reduir la sensibilitat:Quan el corrent de retroalimentació del motor principal disminueix,Cada cop el valor disminueix més que aquest valor,Desacceleració del motor de viatge;
Compensació de sensibilitat:Increment de compensació per als paràmetres de sensibilitat més i menys;
Establir corrent:Tall automàtic,Llindar del corrent de retroalimentació del motor principal,superar aquest valor,El motor que camina comença a disminuir la velocitat;per sota d'aquest valor,El motor que camina comença a accelerar;Unitat Amperi;
Establir corrent:Tall automàtic,Llindar del corrent de retroalimentació del motor principal,superar aquest valor,El motor que camina comença a disminuir la velocitat;per sota d'aquest valor,El motor que camina comença a accelerar;Unitat Amperi;
Sortida buida:Quan s'inicia el mode automàtic,Si el corrent de retroalimentació del motor principal és inferior a aquest valor,està en mode inactiu,superior a aquest valor,després sortiu del mode inactiu,Entra al mode de tall,Unitat Amperi;
Corrent sense càrrega:Quan s'inicia el mode automàtic,Si el corrent de retroalimentació del motor principal és inferior a aquest valor,està en mode sense càrrega,superior a aquest valor,després sortiu del mode sense càrrega,Entra al mode de tall,Unitat Amperi;
Velocitat del braç oscil·lant:Velocitat d'arrencada del motor del braç basculant;
manera de tall:Canvia entre els modes de serra de fulla i de serra de filferro,Després de canviar, els paràmetres també canviaran en conseqüència.;En mode de serra de fulla,S'afegeix un motor de braç oscil·lant a la pantalla del control remot,El mode de serra de filferro no té un motor de braç oscil·lant.;
Temps de rebot:Quan el corrent de retroalimentació del motor principal supera el corrent d'aturada,Detectarà contínuament el corrent de retroalimentació,El temps de rebot és la durada d'aquesta detecció contínua.,superar aquest temps,Detecteu que el corrent del motor principal encara supera el corrent de parada,caminarEl motor s'aturarà;En cas contrari, el motor de marxa continuarà avançant;
aturar el corrent:El corrent de retroalimentació del motor principal supera aquest valor,El motor de viatge s'aturarà;Unitat Amperi;
compensació per defecte:El valor inicial del límit de velocitat del motor que camina quan s'encén el comandament a distància = 50% d'aquest valor;
![]()
| Subministrament de funcionament del receptor |
DC24V/1A (font d'alimentació independent)
|
| Càrrega del punt de sortida del receptor | AC0-250V/3A DC0-30V/5A |
| Regulació de velocitat del receptor Tensió de sortida | DC0-10V |

El dret final a interpretar aquest producte pertany a Chengdu Xinshen Technology Co., Ltd.。


-500x650.png)


