
Scie à fil, coupe automatique, télécommande sans fil
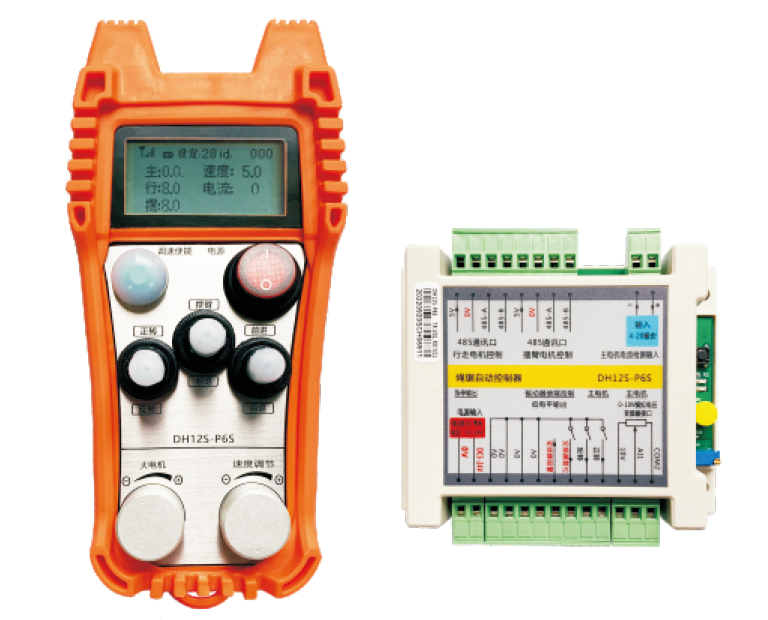
Scie à fil, machine de découpe automatique, télécommande sans fil DH12S-P6S
Description


modèle:Équipement adaptateur DH12S-P6S:Machine à scie à fil/scie à lame


Remarque:Trois types d'antennes peuvent être sélectionnés,L'antenne de tassement de ventouse par défaut est équipée de standard


Vitesse du moteur principal:hôte:0-50
Vitesse du moteur de déplacement:D'ACCORD:0-50
Limite de vitesse maximale du moteur de déplacement de coupe automatique:vitesse:0-30(Les paramètres sont réglables)
Courant de réglage du moteur principal de coupe automatique:installation:28(Les paramètres sont réglables)
Vitesse du moteur du bras oscillant:mettre:0-50

Basse pression:La batterie de la télécommande est trop faible,Veuillez remplacer la batterie

Tomber sur Internet:Interruption du signal sans fil,Veuillez vérifier l'alimentation du récepteur,Aliver à nouveau,Redémarrer la télécommande

1、Télécommande allumée
Le récepteur est alimenté,Le voyant d'alimentation D2 sur le récepteur est toujours allumé,Le voyant D1 commence à clignoter;Deux batteries n ° 5 installées sur la télécommande,Allumez l'interrupteur d'alimentation,Afficher la vitesse du moteur d'affichage,Cela signifie que la startup réussit。
2、Moteur principal et régulation de vitesse
Appuyez et maintenez "Activation du contrôle de vitesse",Tournez l'interrupteur "vers l'avant / inversé" en avant,Le moteur principal du récepteur tourne vers l'avant et s'allume;
Appuyez et maintenez "Activation du contrôle de vitesse",Tournez l'interrupteur "vers l'avant / inversé" en avant,Le moteur principal du récepteur tourne vers l'avant et s'allume;
Appuyez et maintenez "Activation du contrôle de vitesse",Tournez l'interrupteur "vers l'avant / vers l'avant" pour inverser,Le moteur principal du récepteur s’inverse et s’allume;
Déplacez simplement l'interrupteur vers le milieu ou vers l'arrière,Le moteur principal s'arrête immédiatement,Pas besoin d'appuyer sur le contrôle de vitesse pour activer;
Tournez le bouton "Big Motor",La tension de régulation de vitesse de l'onduleur du moteur principal du récepteur peut être ajustée de 0 à 10 V.;
3、Moteur de voyage
3、Moteur de voyage
Appuyez et maintenez "Activation du contrôle de vitesse",Déplacez le commutateur « avant/arrière » vers l'avant ou l'arrière,Le moteur de marche se déplacera à une vitesse élevée de 50;
4、Moteur à bras oscillant et régulation de vitesse
Tournez l'interrupteur "Swing Arm/Reverse" sur le bras oscillant ou la marche arrière.,Le moteur du bras oscillant du récepteur démarre;Tournez ensuite le bouton "Réglage de la vitesse",La vitesse du moteur du bras oscillant peut être ajustée;
Appuyez et maintenez "Activation du contrôle de vitesse",Ensuite, actionnez l'interrupteur "bras oscillant/marche arrière".,Le moteur du bras oscillant se déplacera à une vitesse élevée de 50;
5、Réglage de la limite de vitesse du moteur de déplacement
Appuyez et maintenez enfoncé le bouton « Speed Enable »,Tournez « Réglage de la vitesse » pour régler la limite de vitesse maximale du moteur de déplacement pendant la coupe automatique.;
6、Coupe automatique
premier pas,Démarrer le moteur principal;Étape 2,Ajuster la limite de vitesse maximale du moteur de déplacement;Étape 3,Tournez le commutateur « avant/arrière » pour avancer ou reculer,Entrez en mode de coupe automatique;
7、Paramétrage des paramètres (interdit aux utilisateurs de les modifier en privé)
Entrez le menu des paramètres:En mode manuel,Lorsque la vitesse du moteur principal est de 0,L'interrupteur avant / inversé est plié 3 fois de suite,Puis casser 3 fois de suite,Entrez le menu des paramètres;
Quitter le menu Paramètres:Bouton de réglage de la vitesse pour tourner les pages,Choisissez d'enregistrer ou de ne pas enregistrer,Appuyez sur le bouton Activer pour confirmer;
Courant nominal:Valeur maximale du courant du moteur principal,Unité Ampère;
Paramètres de régulation de vitesse:Paramètres de contrôle automatique de coupe,Par défaut 800,Unité milliseconde,La modification est interdite;
Paramètres de décélération:Lorsque la valeur de modification actuelle de coupe dépasse cette valeur,Commencez à décélérer rapidement,Unité Ampère;
Accélération A1:Lorsque le courant de coupe est inférieur au courant de coupe,La valeur de la vitesse augmentée à chaque accélération du moteur de marche;
Décélération A2: Lorsque le courant de coupe est plus élevé que le courant de coupe set,La valeur de vitesse réduite à chaque décélération du moteur de marche;
Courant du bras oscillant:valeur par défaut,La modification est interdite;
arrêter le temps:Après un arrêt dû à une surcharge de courant en mode automatique,Vérifiez à nouveau le courant après un certain temps,S'il est inférieur au courant réglé,Démarrez automatiquement le moteur de marche;Unité seconde,valeur par défaut,La modification est interdite;
arrêter le temps:Après un arrêt dû à une surcharge de courant en mode automatique,Vérifiez à nouveau le courant après un certain temps,S'il est inférieur au courant réglé,Démarrez automatiquement le moteur de marche;Unité seconde,valeur par défaut,La modification est interdite;
Courant maximum:Plage de courant de retour du moteur principal,Unité Ampère;
Hôte maximum:Plage d'affichage de la vitesse du moteur principal de la télécommande;
Marche maximale:Paramètre invalide;
Décalage de limite de vitesse:Lors de la coupe automatiquement,Limite de vitesse du moteur de marche affichée sur la télécommande = 50 % de ce paramètre;
Ajouter de la sensibilité:Lorsque le courant de retour du moteur principal augmente,Chaque fois que la valeur augmente au-delà de cette valeur,Accélération du moteur de déplacement;
Réduire la sensibilité:Lorsque le courant de retour du moteur principal diminue,Chaque fois que la valeur diminue de plus que cette valeur,Décélération du moteur de déplacement;
Compensation de sensibilité:Incrément de décalage pour les paramètres de sensibilité plus et moins;
Régler le courant:Coupe automatique,Seuil du courant de retour du moteur principal,dépasser cette valeur,Le moteur de marche commence à ralentir;en dessous de cette valeur,Le moteur de marche commence à accélérer;Unité Ampère;
Régler le courant:Coupe automatique,Seuil du courant de retour du moteur principal,dépasser cette valeur,Le moteur de marche commence à ralentir;en dessous de cette valeur,Le moteur de marche commence à accélérer;Unité Ampère;
Sortie vide:Lorsque le mode automatique démarre,Si le courant de retour du moteur principal est inférieur à cette valeur,est en mode ralenti,supérieur à cette valeur,puis quittez le mode ralenti,Passer en mode coupe,Unité Ampère;
Courant à vide:Lorsque le mode automatique démarre,Si le courant de retour du moteur principal est inférieur à cette valeur,est en mode sans chargement,supérieur à cette valeur,puis quittez le mode sans chargement,Passer en mode coupe,Unité Ampère;
Vitesse du bras oscillant:Vitesse de démarrage du moteur du bras oscillant;
mode de coupe:Basculer entre les modes scie à lame et scie à fil,Après la commutation, les paramètres changeront également en conséquence.;En mode scie à lame,Un moteur à bras oscillant est ajouté à l'écran de la télécommande,Le mode scie à fil n'a pas de moteur à bras oscillant.;
Temps anti-rebond:Lorsque le courant de retour du moteur principal dépasse le courant d'arrêt,Détectera en permanence le courant de rétroaction,Le temps anti-rebond est la durée de cette détection continue.,dépasser ce temps,Détecter que le courant du moteur principal dépasse toujours le courant d'arrêt,marcherLe moteur s'arrêtera;Sinon, le moteur de marche continuera d'avancer;
arrêter le courant:Le courant de retour du moteur principal dépasse cette valeur,Le moteur de déplacement s'arrêtera;Unité Ampère;
décalage par défaut:La valeur initiale de la limite de vitesse du moteur de marche lorsque la télécommande est allumée = 50 % de cette valeur;
![]()
| Alimentation de fonctionnement du récepteur |
DC24V / 1A (alimentation indépendante)
|
| Charge de point de sortie du récepteur | AC0-250V/3ADC0-30V/5A |
| Tension de sortie de la régulation du récepteur | DC0-10V |

Le droit final d'interpréter ce produit appartient à Chengdu Xinshen Technology Co., Ltd.。




