
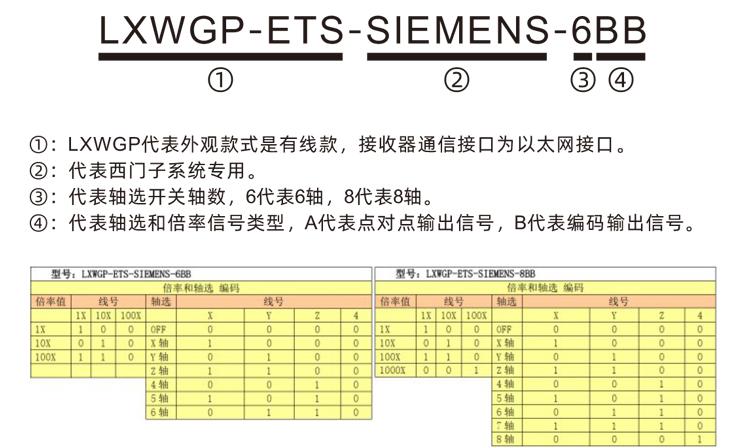
Volant électronique filaire LXWGP-ETS-SIEMENS
Description


Le volant électronique est utilisé pour le guidage manuel des machines-outils CNC、position、Opération de grève。Ce modèle de volant électronique est un volant électronique filaire Siemens avec affichage réel.,Le volant est connecté à l'interface X130 du système Siemens via un câble réseau.,Lisez les coordonnées du système et affichez-les sur l'écran LCD du volant via la communication du protocole S7.,Et la sélection de l'axe du système de commande par volant peut être effectuée via la communication.、grossissement、Bouton et autres signaux。

1.Connecté à l'aide d'un câble de prise aviation à 6 conducteurs,Câble de volant longueur 10 mètres。
2.L'écran du volant peut afficher les coordonnées de la pièce du système、Coordonnées mécaniques、Vitesse d'avance、Sélection d'axe、Informations telles que le grossissement。
3.Bouton d'arrêt d'urgence de prise en charge,Sortie du signal de commutation de quantité IO,L'arrêt d'urgence de l'arrêt du volant est toujours efficace。
4.Prend en charge 6 boutons personnalisés,Commutation du signal IO,Peut émettre des signaux vers le système via le câblage IO ou la communication。
5.Prend en charge le contrôle 6 ou 8 axes,Commutation du signal IO,Peut émettre des signaux vers le système via le câblage IO ou la communication。
6.Prend en charge 3 ou 4 niveaux de contrôle de grossissement,Commutation du signal IO,Peut émettre des signaux vers le système via le câblage IO ou la communication。
7.Encodeur d'impulsion de support,100Pouls / cercle,Le signal peut être émis vers le système via un câblage d'impulsion AB.。
8.Protocole Siemens Siens S7,Compatible avec Siemens 828D.、840DSL、ONE et autres systèmes modèles。

| Tension d'alimentation de fonctionnement du volant | DC24V/1A |
| Tension d'alimentation du récepteur | DC24V/1A |
| Plage de charge de sortie IO du récepteur |
DC24V
|
| Longueur du câble d'extrémité du volant |
10m
|
| Longueur du câble d'extrémité du récepteur |
1m
|
| Longueur du câble réseau côté récepteur |
3m
|
| Température de fonctionnement |
-25℃<X<55℃
|
| Hauteur anti-chute |
1m
|
| Personnaliser le nombre de boutons | 6individuel |
| Taille du produit | 233*90.7*77.4(mm) |


Commentaires:
Bouton d'arrêt d'éventualité:
Appuyez sur le bouton d'arrêt d'urgence,Deux groupes de sorties IO d'arrêt d'urgence sur le récepteur sont déconnectées,Et toutes les fonctions du volant ne sont pas valides。
Après la libération de l'arrêt d'urgence,Sortie IO d'arrêt d'urgence fermé sur le récepteur,Toutes les fonctions du volant sont restaurées。
Affichage à l'écran:
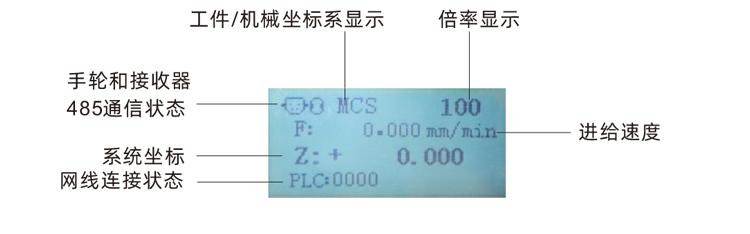
API:0000Cela signifie que le câble réseau n'est pas connecté,API:1010Cela signifie que le câble réseau et le système PLC sont connectés avec succès.,
API:1110Indique que le volant écrit avec succès les données du système.,API:0001Indique une connexion réussie à l'ordinateur。
③ boutons personnalisés:
6Boutons personnalisés,Chaque bouton correspond à un point de sortie IO sur le récepteur,Également connecté au système via la communication。
④Axis Sélection du commutateur:
La commutation du commutateur de sélection de l'axe peut basculer l'axe mobile contrôlé par le volant。
⑤ Bouton Activer:
Appuyez et maintenez n'importe quel bouton d'activation des deux côtés,Le codeur d'impulsion à bascule est efficace。 Et les deux groupes du récepteur permettent une conduction de sortie IO,Libérez le bouton Activer,Activer la déconnexion de la sortie IO。
⑥Commutateur de grossissement:
Communiquez le commutateur d'agrandissement pour commuter le grossissement contrôlé par le volant。
⑦Encodeur d'impulsions:
Appuyez et maintenez le bouton Activer,Encodeur de pouls tremblant,Envoyer un signal d'impulsion,Contrôlez le mouvement de l'arbre de la machine。
⑧Câble du volant:
Câble reliant le volant et le récepteur,prise aéronautique,Pour l'alimentation et la communication du volant。



6.1Étapes d'installation du produit
1.Installez le récepteur dans l'armoire électrique à travers les trous de vis aux quatre coins.。
2.Reportez-vous à notre schéma de câblage récepteur,Comparez votre équipement sur place,Connectez l'appareil via le câble et le récepteur
connecter,Utilisez un câble réseau pour connecter le récepteur à l'interface X130 du système。
3.Une fois le récepteur fixé,Installez la base de la prise aviation dans l'ouverture du volant sur le panneau,Une autre base
Le bornier est branché sur l'interface du volant du récepteur.。Insérez ensuite la fiche aviation du câble d'extrémité du volant dans la base,Serrer
luminaires。
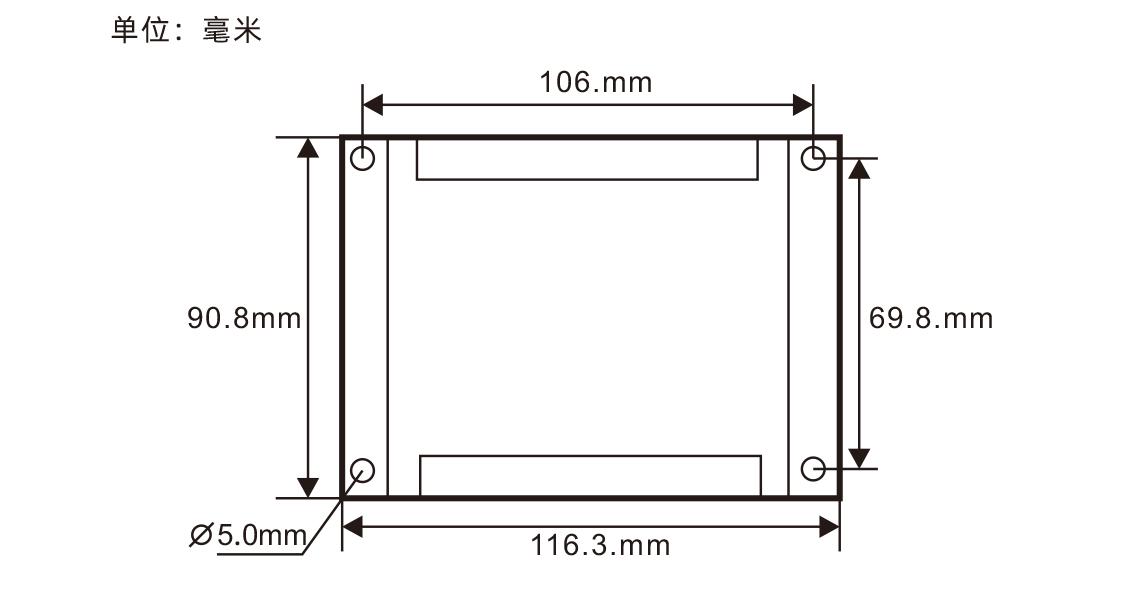
6.2Taille d'installation du récepteur
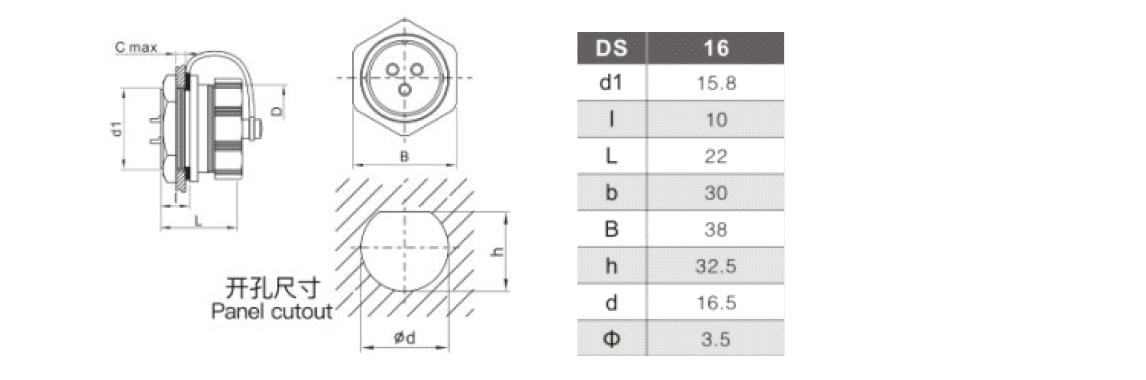
6.3Dimensions d'installation de la prise aviation
6.4Schéma de référence de câblage du récepteur

6.2Taille d'installation du récepteur
6.3Dimensions d'installation de la prise aviation
6.4Schéma de référence de câblage du récepteur

1.Le récepteur est alimenté,Le voyant de fonctionnement du récepteur est allumé,Connectez le récepteur à l'ordinateur à l'aide d'un câble réseau,Définir une adresse IP fixe pour votre ordinateur,Utilisez le logiciel de l'outil de configuration réseau pour définir les paramètres réseau pour la fonction volant.,Paramètres spécifiques
Pour la méthode, veuillez vous référer aux « Instructions d'utilisation du volant filaire LXWGP-ETS »。
2.Une fois la configuration du récepteur terminée,Le système nécessite la programmation d'un programme PLC,Pour plus de détails, veuillez vous référer aux « Méthodes de réglage LXWGP-ETS pour différents systèmes CNC Siemens » et aux informations de routine du programme API.。
3.Une fois les paramètres ci-dessus terminés,Apportez le récepteur à l'armoire électrique de la machine et installez-le,Débranchez le câble réseau de l'ordinateur et branchez-le sur l'interface X130 du système,Branchez les fils d'alimentation et d'impulsion du récepteur。
4.La machine est alimentée,Le récepteur est alimenté,Le voyant de fonctionnement du récepteur est allumé,Allumez l’interrupteur d’alimentation du volant,Botte d'écran du volant,Écran d'affichage PLC:1010,Indique une communication réussie entre le volant et le système.。
5.Sélectionner la sélection de l'axe:Commutateur de sélection de l'essieu interrupteur,Sélectionnez l'axe que vous souhaitez utiliser。
6.Sélectionnez le multiplicateur:Communiquez le commutateur de grossissement,Sélectionnez le multiplicateur dont vous avez besoin。
7.Déplacer l'axe:Appuyez et maintenez le bouton Activer,Sélectionnez l'axe et commutateur,Sélectionnez l'interrupteur multiplicateur,Puis tourner le codeur d'impulsion,Tourner l'axe de mouvement vers l'avant dans le sens horaire,Tourner l'axe de mouvement négatif dans le sens antihoraire。
8.Appuyez et maintenez n'importe quel bouton personnalisé,La sortie du bouton IO correspondant du récepteur est activée,Sortie du bouton de libération Close。
9.Appuyez sur le bouton d'arrêt d'urgence,Le récepteur déconnecte la sortie IO de l'arrêt d'urgence,La fonction du volant échoue,Libérez le bouton d'arrêt d'urgence,Arrêt d'urgence Sortie IO fermée,Récupération de la fonction du volant。


| Situation des défauts | Cause possible |
Méthodes de dépannage
|
|
|
Méthodes de dépannage
|
1.Si le câble d'aviation entre le volant et le récepteur est connecté correctement et de manière fiable
2.La tension d'alimentation du récepteur est-elle suffisante ?
3.Échec du roue à la main
|
1.Vérifier la connexion du câble aviation entre le volant et le récepteur
2.Vérifier la puissance d'entrée du récepteur
3.Contactez le fabricant pour retourner à l'usine pour l'entretien
|
|
| Aucune réponse lors de l'actionnement du volant |
1.Les câbles réseau entre le récepteur et le système sont-ils connectés ?
2.Le programme API du système est-il bien écrit ?
3.La configuration du récepteur est-elle correctement définie ?
4.L'icône de communication 485 affichée sur l'écran du volant est-elle défaillante ?
5.Lors de l'exploitation du volant,Vous devez appuyer et maintenir les boutons d'activation des deux côtés
6.Le bouton d'arrêt d'urgence est-il relâché ?
|
1.Vérifiez si le récepteur et le port réseau du système X130 sont connectés avec un câble réseau
2.Vérifiez et confirmez si le système PLC est écrit conformément aux documents de référence que nous avons fournis.
3.Vérifiez si le destinataire fait référence à nos informations et au logiciel outil fourni,Définissez correctement les paramètres réseau et l'adresse DB du récepteur, etc.
4.Vérifier entre le volant et le récepteur
6douille verte à noyau,Deux des lignes de communication:485-A et 485-B,Est-il correctement et solidement connecté ?,Y a-t-il une coupure de circuit ?
|
|
|
Une fois que le récepteur est alimenté,La lampe de travail du récepteur ne s'allume pas
|
1.Anomalie d'alimentation
2.Erreur de câblage d'alimentation
3.Défaillance du récepteur
|
1.Vérifiez si l'alimentation a une tension,
La tension répond-elle aux exigences
2.Vérifiez si les pôles positifs et négatifs de l'alimentation sont connectés à l'envers
3.Retour à l'entretien de l'usine
|

1.S'il vous plaît à température ambiante et à la pression,Utilisé dans un environnement sec,Prolonger la durée de vie。
2.Veuillez éviter de vous mouiller sous la pluie、Utilisé dans des environnements anormaux tels que des cloques,Prolonger la durée de vie。
3.Veuillez garder le volant propre,Prolonger la durée de vie。
4.Veuillez éviter de presser、Automne、Bumpling, etc.,Empêchez les accessoires de précision à l'intérieur du volant des erreurs de dommage ou de précision。
5.Pas utilisé pendant longtemps,Veuillez stocker le volant dans un endroit propre et sûr。
6.Faites attention à l'épreuve d'humidité et à l'épreuve des chocs pendant le stockage et le transport。

1.Veuillez lire les instructions pour une utilisation en détail avant utilisation,Le personnel non professionnel est interdit。
2.Après qu'une situation anormale se produise dans le volant,Veuillez arrêter de l'utiliser immédiatement,et dépanner,Avant le dépannage,Il est interdit d'utiliser à nouveau le volant défectueux,Évitez les accidents de sécurité dus à des pannes inconnues du volant;
3.Si la réparation est requise,Veuillez contacter le fabricant,Si les dommages causés par l'auto-réparation,Le fabricant ne fournira pas de garantie。




.png)
