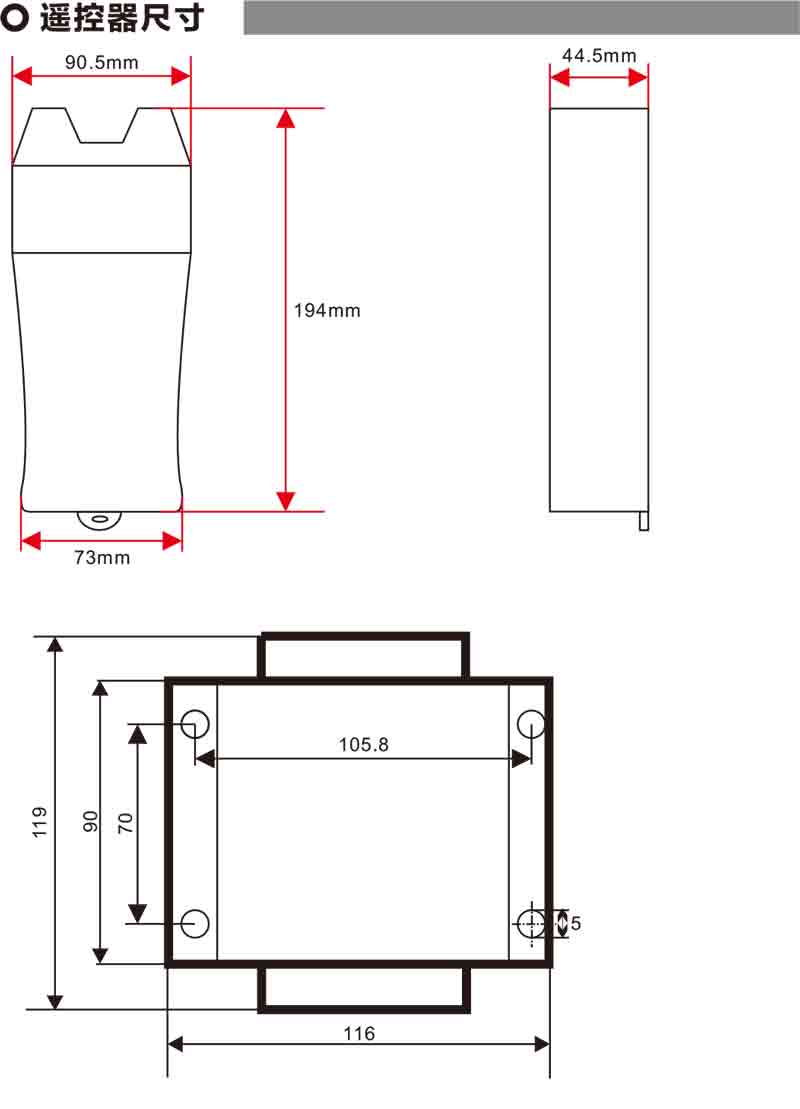
Control remoto sen fíos de corte automático para serra de corda de rastrexo
CRAWLER ROPE viu control remoto sen fíos automático de control de fíos DH12S-LD
Descrición

modelo:DH12S-LD Equipos adaptativos:Máquina de serra de corda de rastrexo

Comentario:Pódense seleccionar tres tipos de antenas,A antena predeterminada da cunca de succión é estándar 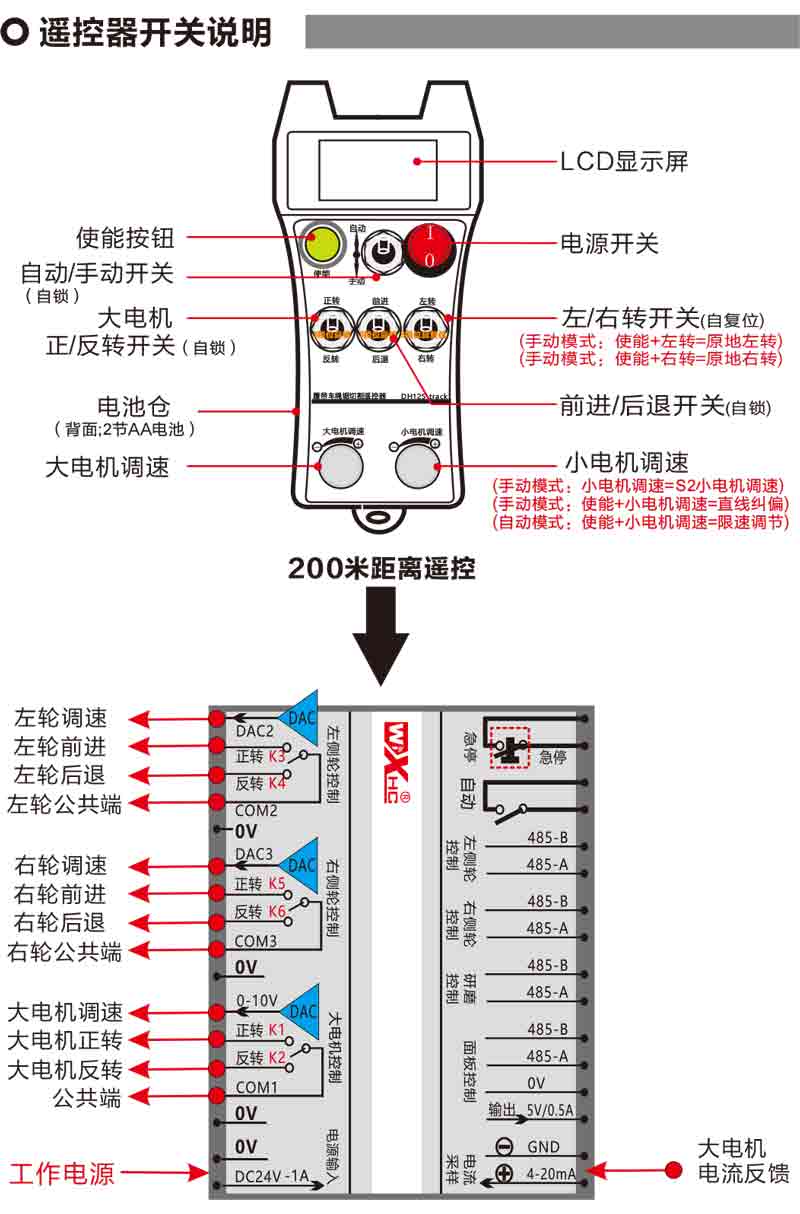

Gran velocidade do motor:S1:0-50
Pequena velocidade do motor:S2:0-50
Límite de velocidade máxima do motor de corte automático:F:0-30(Os parámetros son axustables)
Corte automático de corrente máxima:Ic:0-35(Os parámetros son axustables)
Valor de corrección de desviación lineal:Df:-99-99(1 unidade é aproximadamente 0,02V)
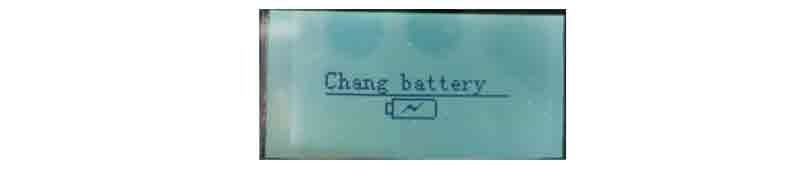
Baixa presión:A batería do control remoto é demasiado baixa,Substitúe a batería
Cae fóra de Internet:Interrupción do sinal sen fíos,Comprobe a fonte de alimentación do receptor,Acenda de novo,Reinicie o control remoto
![]()
1、Control remoto activado
O receptor está acendido,A luz dirixida por RF no receptor comeza a parpadear;Dúas baterías nº 5 instaladas no control remoto,Activa o interruptor de alimentación,Mostrar a velocidade do motor,Significa que o inicio ten éxito。
2、Regulamento de motor e velocidade grande
Xire o interruptor "adiante/inverso" para adiante,O motor grande do receptor acende,A pantalla mostra a rotación cara adiante ;
;
Xire o interruptor "cara adiante/inverso" para reverter,RECENTIDOR GRANDE MOTOR REVERSAL,Visualización de visualización de inversión ;
;
;Xire o interruptor "cara adiante/inverso" para reverter,RECENTIDOR GRANDE MOTOR REVERSAL,Visualización de visualización de inversión
;Xire o botón "Regulación de velocidade do motor grande",Pode axustar a tensión de saída do receptor Regulación de velocidade do motor grande 0-10V;
3、Regulamento pequeno e de velocidade de motor
Xire o interruptor "adiante/inverso" para adiante,O avance do revólver do receptor e o progreso correcto aberto,Mostrar cara adiante
Xire o interruptor "cara adiante/inverso" cara ás costas,Reversión do receptor e reversión da roda dereita aberta,Amosar de volta
En modo manual:Xira o botón "Regulación de velocidade do motor pequeno",Ao mesmo tempo, axusta a tensión de saída da roda esquerda do receptor Regulación da velocidade da roda dereita 0-10V;
En modo manual:Xira o botón "Regulación de velocidade do motor pequeno",Ao mesmo tempo, axusta a tensión de saída da roda esquerda do receptor Regulación da velocidade da roda dereita 0-10V;
4、Xire á esquerda e á dereita
Xire o interruptor "esquerdo/dereito" á esquerda,REPEDER REILT ROAT AVANCE ABRIGADO,A pantalla xira á esquerda
Xire o interruptor "esquerdo/dereito" á dereita,Ábrese o avance do revólver do receptor,A pantalla xira á dereita
5、Xirando no lugar
En modo manual:
Xire á esquerda no lugar:Prema e manteña o botón Activar,Xire o interruptor "esquerdo/dereito" á esquerda,A reversión do receptor e o avance da roda dereita aberto,Comeza a xirar á esquerda no lugar;
Xire á dereita no lugar:Prema e manteña o botón Activar,Xire o interruptor "esquerdo/dereito" á dereita,Ábrese os avances dos revólveres do receptáculo e as costas da roda dereita,Comeza a xirar á dereita no lugar;
6、Axuste do límite de velocidade pequena do motor
En modo automático:Prema e manteña o botón Activar,Xire a "pequena regulación de velocidade do motor" para axustar a velocidade máxima do pequeno motor durante o corte automático;
7、Corte automático
Primeiro paso,Comeza o motor grande;
Paso 2,Cambia o cambio de modo a "Auto";
Paso 3,Comeza o pequeno motor,A pantalla da pantalla entra "cortando automático",Indica que se introduciu o modo de corte automático;
Paso 2,Cambia o cambio de modo a "Auto";
Paso 3,Comeza o pequeno motor,A pantalla da pantalla entra "cortando automático",Indica que se introduciu o modo de corte automático;
8、Corrección de liña recta
Cando o motor esquerdo e dereito avanza e cara atrás,Hai unha diferenza nas velocidades esquerda e dereita,A camiñada en liña recta é compensada,Pódese empregar a función de corrección de desviación lineal do control remoto,Afinar a velocidade das rodas esquerda e dereita;
Principio de corrección:A través da función de corrección de sesgo,Velocidade do revólver de axuste fino,Para conseguir a mesma velocidade que a roda dereita,Realizar a sincronización das velocidades da roda esquerda e dereita,Elimina as compensacións;
Método de operación de corrección:En modo manual,Prema e manteña o botón Activar,Xira "pequena regulación de velocidade do motor";
Xira no sentido das agullas do reloxo,Aumenta a tensión de velocidade do revólver,Aumento do valor de corrección da desviación da pantalla;
Xira en sentido antihorario,Reduce a tensión de velocidade do revólver,Redúcese o valor da corrección da desviación da pantalla;
Rango de corrección:Valor de corrección -90 a 90;1A tensión de corrección de sesgo de cada unidade de corrección de desviación é de aproximadamente 0,02V;
9、Menú de parámetros (o usuario prohibe a modificación privada)
Algunhas funcións do control remoto pódense axustar a través de parámetros,En modo manual,Cando a velocidade do pequeno motor S2 é 10,
O interruptor cara adiante/inverso está dobrado 3 veces seguido,Logo rompelo 3 veces seguidas,Introduza o menú do parámetro;
Saia do menú de parámetros:Elixe gardar ou non,A continuación, prema o botón Activar para confirmar a saída;
Corrente máxima:Corrente de traballo do motor de corte,A corrente de corte é o 80% desta corrente;
Parámetros de regulación de velocidade:Parámetros de control automático de corte,Predeterminado 800,Está prohibida a modificación;
Parámetros de deceleración:Parámetros de control automático de corte,Cando o valor de cambio de corrente de corte supera este valor,Comeza a desacelerar
Aceleración A1: Parámetros de control automático de corte,Cando a corrente de corte é inferior á corrente de corte conxunto,Acelera lentamente;
Deceleración a2: Parámetros de control automático de corte,Cando a corrente de corte é superior á corrente de corte conxunto,Velocidade lenta;
Recollida automática de coitelos:non válido;
Comeza a auto-bloqueo:0,Non te bloquees;1,Auto-bloqueo. Prema a tecla Activar + reenviar e reverter para entrar en vigor,E bloquealo;
Camiñando máximo:Velocidade mínima do motor;
Corrente de corte:Estableza o valor máximo actual do motor principal para o corte automático,A corrente de feedback supera este valor,Comeza a desacelerar;
Límite de velocidade predeterminado:Ao alimentar,Velocidade máxima predeterminada para a velocidade de corte automático;
Modo automático:0,O interruptor automático é control automático;1,Punto de saída automática de control automático de IO;
Compensación do límite de velocidade:Ao cortar automaticamente,Velocidade máxima do motor pequeno;
Host máximo:Velocidade máxima do motor grande.
| Fonte de enerxía do receptor | DC24V/1A (fonte de alimentación independente) |
| Carga do punto de saída do receptor | AC0-250V/3A DC0-30V/5A |
| Tensión de saída da regulación da velocidade do receptor |
DC0-10V
|


-500x650.png)