
Roda tangan elektronik nirkabel/roda tangan elektronik/roda tangan/roda tangan elektronik CNC Roda tangan elektronik nirkabel XWGP-ETS-FANUC
Berlaku untuk sistem Fanuc CNC.
Fanako Special Handwheel XWGP–ETS-FANUC
Keterangan

Handwheel elektronik nirkabel digunakan untuk panduan manual peralatan mesin CNC、posisi、Operasi pemogokan。Produk ini menggunakan teknologi transmisi nirkabel,Menghilangkan koneksi kawat musim semi tradisional,Mengurangi kegagalan peralatan yang disebabkan oleh kabel,Seret kabel gratis,Kerugian seperti noda minyak,Operasi yang lebih nyaman。Model handwheel elektronik nirkabel ini adalah handwheel khusus untuk sistem FANUC.,Tampilan koordinat sistem FANUC secara real-time pada layar handwheel melalui protokol IO-LINK,Dan melalui protokol IO-LINK,Pilih sumbu secara langsung、pembesaran、Sistem akses sinyal tombol,Kurangi kabel。

1.Mengadopsi teknologi komunikasi nirkabel 433MHz,Jarak operasi nirkabel 40 meter;
2.Mengadopsi fungsi hopping frekuensi otomatis,Gunakan 32 set remote control nirkabel secara bersamaan,Tidak ada efek satu sama lain;
3.Dukung tombol berhenti darurat,Beralih kuantitas output sinyal IO,Hubungkan ke sistem melalui kabel IO;
4.Mendukung 4 tombol khusus,Mengalihkan sinyal IO,Sinyal keluaran ke sistem melalui protokol IO-LINK;
5.Mendukung tombol gerakan cepat + dan -,Tekan dan tahan tombol untuk menggerakkan mesin, bukan roda tangan;
6.Mendukung kontrol 6 sumbu,Mengalihkan sinyal IO,Sinyal keluaran ke sistem melalui protokol IO-LINK;
7.Mendukung Kontrol Pengganda 3-Kecepatan,Mengalihkan sinyal IO,Sinyal keluaran ke sistem melalui protokol IO-LINK;
8.Dukungan Mengaktifkan Fungsi Tombol,Hubungkan ke sistem melalui kabel IO,Kontrol encoder diaktifkan secara bersamaan;
9.Dukung Pulse Encoder,100Pulsa/putar,Akses antarmuka handwheel sistem MPG dengan mengeluarkan sinyal berkode AB;



Komentar:
Komentar:
①Tombol berhenti darurat:
Tekan tombol berhenti darurat,Dua kelompok output IO berhenti darurat pada penerima terputus,Dan semua fungsi handwheel tidak valid。Setelah perhentian darurat dilepaskan,Stop darurat IO output ditutup pada penerima,Semua fungsi handwheel dipulihkan。
②Tampilan layar:

③Tombol khusus:
4Tombol khusus,Setiap tombol sesuai dengan titik output IO pada penerima,Hubungkan ke sistem melalui IO-LINK。Umumnya tombol ~ diatur sebagai tombol kecepatan tinggi。
④ Sakelar pemilihan sumbu:
Beralih sakelar pemilihan sumbu dapat mengganti sumbu bergerak yang dikendalikan oleh handwheel。
⑤Tombol pintasan:
Tekan tombol pintasan +,Mesin bergerak maju,Tekan tombol pintasan -,Mesin bergerak ke arah negatif,Dapat menggantikan roda tangan untuk menggerakkan mesin。
⑥Tombol aktifkan:
Tekan dan tahan tombol aktifkan di kedua sisi,Ini efektif hanya dengan menggoyangkan encoder pulsa。 Dan 2 set output IO yang diaktifkan pada receiver dihidupkan,Lepaskan tombol aktifkan,Aktifkan pemutusan output IO。
⑦Saklar pembesaran:
Mengalihkan sakelar pembesaran dapat mengalihkan pembesaran yang dikendalikan oleh roda tangan.。
⑧Encoder pulsa:
Tekan dan tahan tombol aktifkan,Mengguncang encoder pulsa,Kirim Sinyal Denyut Nadi,Kontrol gerakan poros mesin。
⑨Saklar daya:
Tombol start roda tangan。



Langkah Instalasi Produk:
1.Pasang penerima di lemari listrik melalui snap-on di bagian belakang,Atau pasang di kabinet listrik melalui lubang sekrup di empat sudut penerima.。
1.Pasang penerima di lemari listrik melalui snap-on di bagian belakang,Atau pasang di kabinet listrik melalui lubang sekrup di empat sudut penerima.。
2.Lihat Diagram Pengkabelan Penerima kami,Bandingkan peralatan di tempat Anda,Hubungkan perangkat melalui kabel dan penerima。
3.Setelah penerima diperbaiki,Antena yang dilengkapi dengan penerima harus terhubung,Dan pasang ujung luar antena atau letakkan di luar lemari listrik,Dianjurkan untuk menempatkan sinyal di bagian atas lemari listrik.,Tidak diperbolehkan memutuskan antena,Atau tempatkan antena di dalam lemari listrik,Itu dapat menyebabkan sinyal tidak dapat digunakan。
4.Akhirnya nyalakan sakelar daya handwheel,Anda dapat mengoperasikan mesin remote control handwheel。
Ukuran pemasangan penerima:
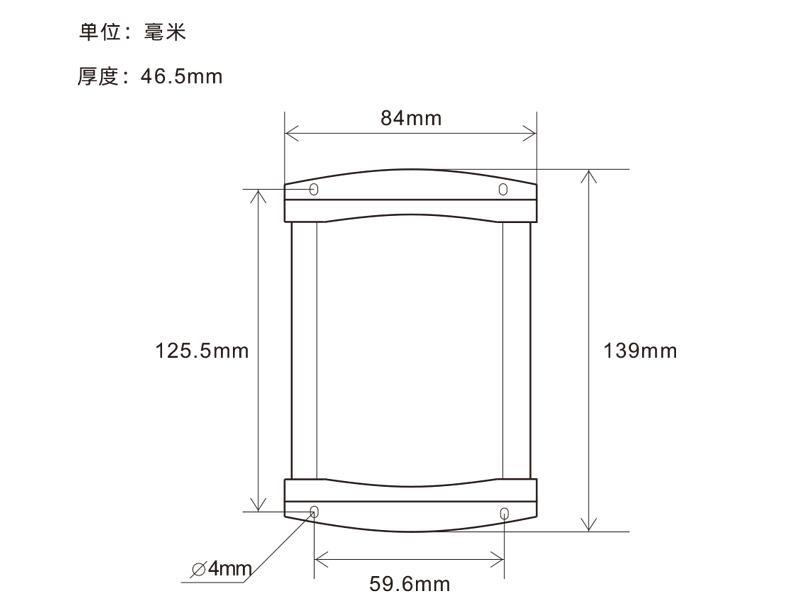
Diagram referensi kabel penerima:


1.Silakan pada suhu dan tekanan kamar,Digunakan di lingkungan kering,Memperpanjang masa pakai;
2.Harap hindari basah dalam hujan、Digunakan dalam lingkungan abnormal seperti lecet,Memperpanjang masa pakai;
3.Harap jaga handwheel bersih,Memperpanjang masa pakai;
4.Harap hindari pemerasan、Jatuh、Menabrak, dll.,Cegah aksesori presisi di dalam roda tangan dari kerusakan atau kesalahan akurasi;
5.Tidak digunakan untuk waktu yang lama,Silakan simpan handwheel di tempat yang bersih dan aman;
6.Perhatikan bukti kelembaban dan kejut selama penyimpanan dan transportasi。

1.Harap baca instruksi untuk digunakan secara detail sebelum digunakan,Personel non-profesional dilarang;
2.Harap isi daya tepat waktu ketika baterai terlalu lemah,Hindari kesalahan yang disebabkan oleh daya yang tidak mencukupi, menyebabkan roda tangan tidak dapat beroperasi;
3.Jika perbaikan diperlukan,Silakan hubungi produsen,Jika kerusakan yang disebabkan oleh perbaikan diri,Pabrikan tidak akan memberikan garansi。





