Kontrol remote nirkabel pemotongan otomatis untuk gergaji tali crawler
Crawler Rope Saw Machine-Automatic Wireless Remote Remote Control Dh12s-Ld
Keterangan

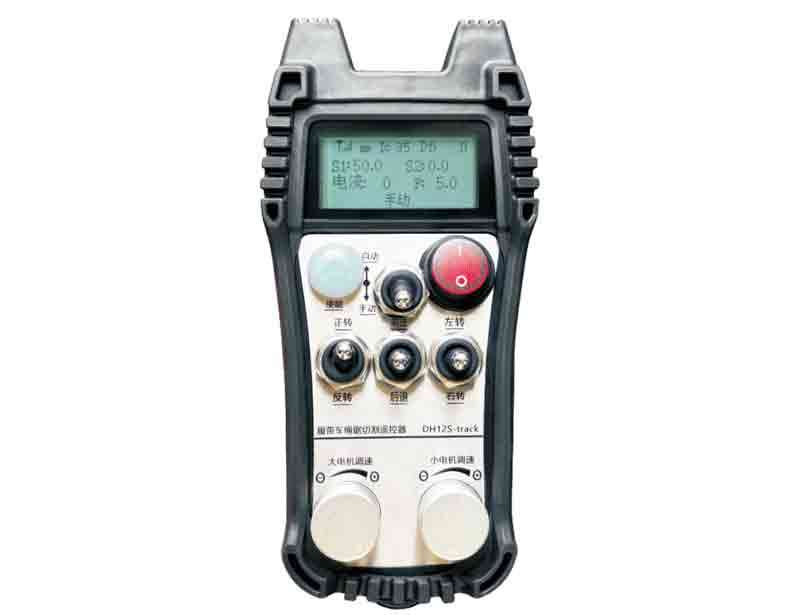
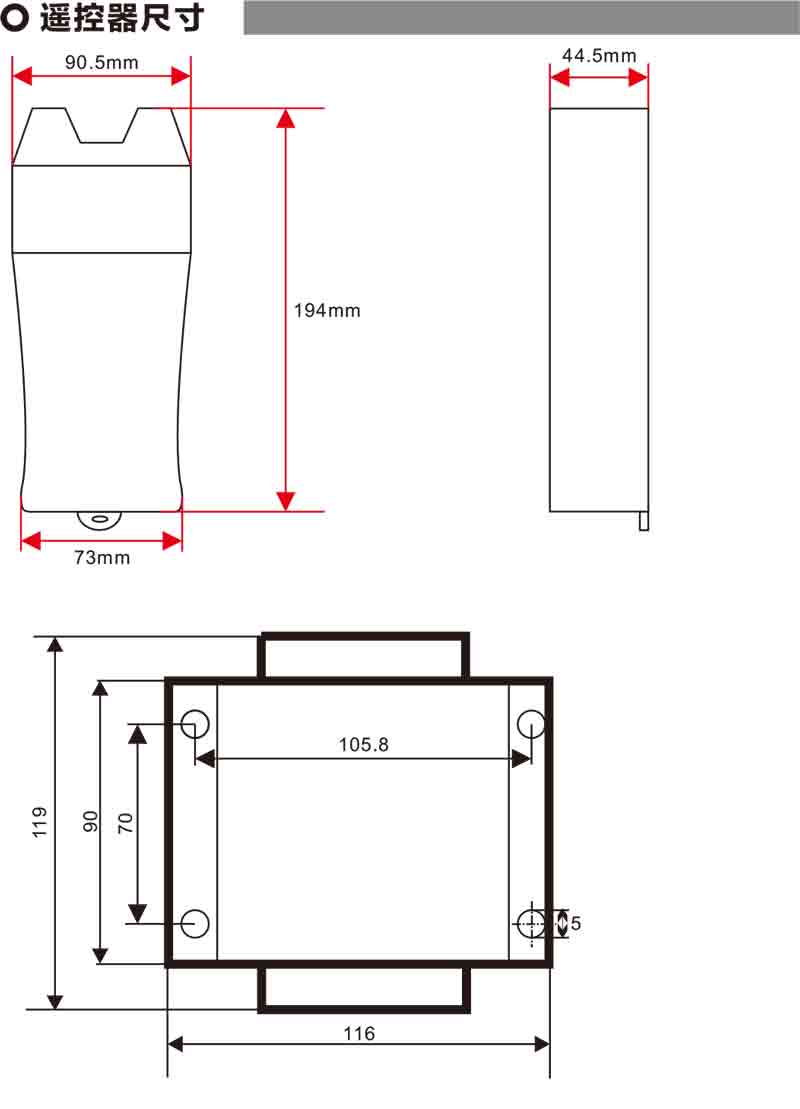
model:DH12S-LD Peralatan adaptif:Mesin gergaji tali crawler

Komentar:Tiga jenis antena dapat dipilih,Antena cangkir hisap default dilengkapi dengan standar 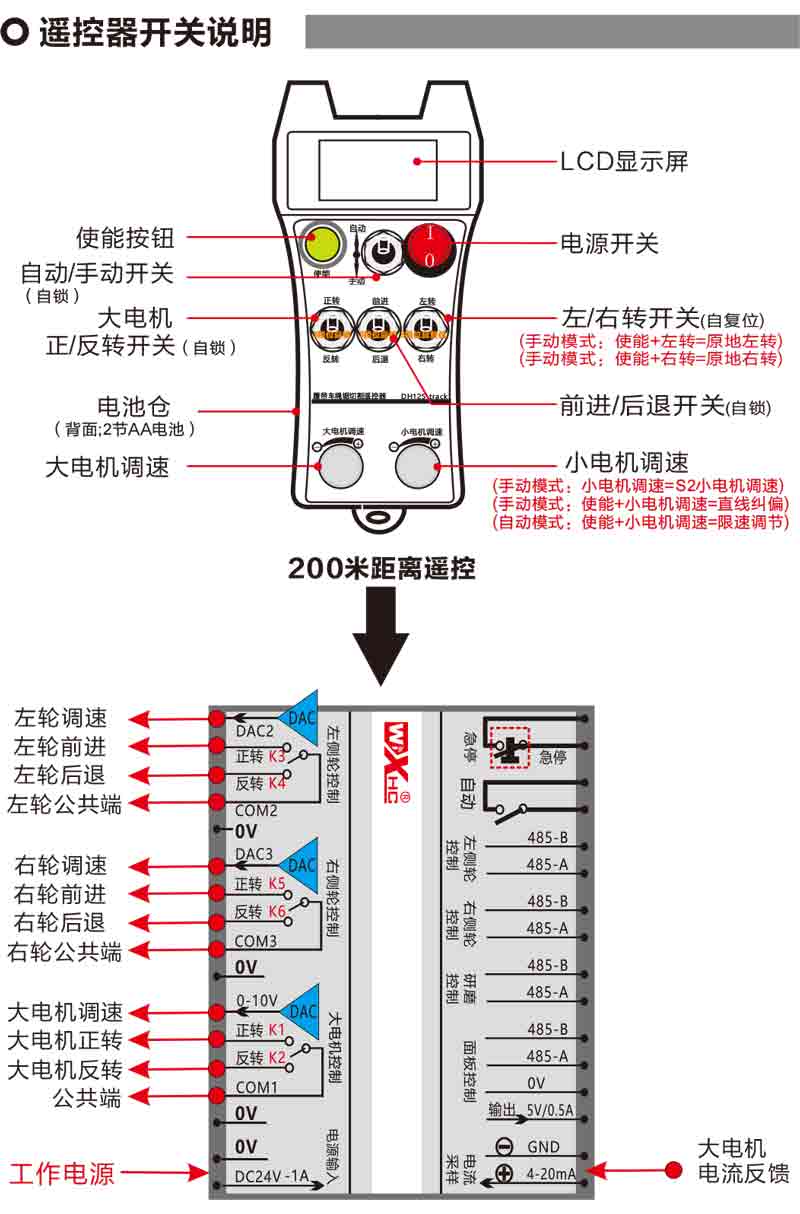

Kecepatan motor yang besar:S1:0-50
Kecepatan motor kecil:S2:0-50
Batas kecepatan maksimum motor motor otomatis:F:0-30(Parameter dapat disesuaikan)
Arus maksimum pemotongan otomatis:Ic:0-35(Parameter dapat disesuaikan)
Nilai koreksi deviasi linier:Df:-99-99(1 unit sekitar 0,02V)
Tekanan rendah:Baterai remote control terlalu rendah,Harap ganti baterai
Jatuh dari internet:Gangguan sinyal nirkabel,Silakan periksa catu daya penerima,Power on lagi,Mulai ulang remote control
![]()
1、Remote control dihidupkan
Penerima didukung,Cahaya yang dipimpin RF pada penerima mulai berkedip;Dua baterai No. 5 dipasang di remote control,Nyalakan sakelar daya,Tampilan Tampilan Kecepatan Motor,Itu berarti startup berhasil。
2、Peraturan motor dan kecepatan besar
Putar sakelar "maju/mundur" ke depan,Motor besar penerima menyala,Tampilan menampilkan rotasi ke depan ;
;
Putar sakelar "maju/terbalik" menjadi terbalik,Penerima pembalikan motor besar di,Tampilan Tampilan Inversi ;
;
;Putar sakelar "maju/terbalik" menjadi terbalik,Penerima pembalikan motor besar di,Tampilan Tampilan Inversi
;Putar kenop "regulasi kecepatan motor besar",Itu dapat menyesuaikan tegangan output dari penerima regulasi kecepatan motor besar 0-10V;
3、Motor kecil dan regulasi kecepatan
Putar sakelar "maju/mundur" ke depan,Kemajuan revolver penerima dan kemajuan yang tepat terbuka,Tampilkan ke depan
Putar sakelar "maju/mundur" ke belakang,Pembalikan penerima dan pembalikan roda kanan terbuka,Tampilkan kembali
Dalam mode manual:Putar kenop "regulasi kecepatan motor kecil",Pada saat yang sama, sesuaikan tegangan output dari regulasi kecepatan roda kanan roda kiri 0-10V;
Dalam mode manual:Putar kenop "regulasi kecepatan motor kecil",Pada saat yang sama, sesuaikan tegangan output dari regulasi kecepatan roda kanan roda kiri 0-10V;
4、Belok kiri dan kanan
Putar sakelar "kiri/kanan" ke kiri,Penerima Roda Kanan Kemajuan untuk Terbuka,Tampilan tampilan berbelok ke kiri
Putar sakelar "kiri/kanan" ke kanan,Penerima Revolver Advance Dibuka,Tampilan tampilan berbelok ke kanan
5、Berbelok di tempat
Dalam mode manual:
Belok kiri di tempatnya:Tekan dan tahan tombol aktifkan,Putar sakelar "kiri/kanan" ke kiri,Pembalikan penerima dan kemajuan roda kanan terbuka,Mulailah belok kiri di tempatnya;
Belok kanan di tempat:Tekan dan tahan tombol aktifkan,Putar sakelar "kiri/kanan" ke kanan,Revolver Revolver Kemajuan dan punggung roda kanan terbuka,Mulailah berbelok di tempat;
6、Penyesuaian batas kecepatan motor kecil
Dalam mode otomatis:Tekan dan tahan tombol aktifkan,Putar "regulasi kecepatan motor kecil" untuk menyesuaikan kecepatan maksimum motor kecil selama pemotongan otomatis;
7、Pemotongan otomatis
Langkah pertama,Mulailah motor besar;
Langkah 2,Beralih sakelar mode ke "otomatis";
Langkah 3,Mulailah motor kecil,Tampilan layar masuk "memotong otomatis",Menunjukkan bahwa mode pemotongan otomatis telah dimasukkan;
Langkah 2,Beralih sakelar mode ke "otomatis";
Langkah 3,Mulailah motor kecil,Tampilan layar masuk "memotong otomatis",Menunjukkan bahwa mode pemotongan otomatis telah dimasukkan;
8、Koreksi garis lurus
Saat motor kiri dan kanan bergerak maju dan mundur,Ada perbedaan kecepatan kiri dan kanan,Berjalan lurus diimbangi,Fungsi koreksi deviasi linier dari remote control dapat digunakan,Menyempurnakan kecepatan roda kiri dan kanan;
Prinsip Koreksi:Melalui fungsi koreksi bias,Kecepatan revolver fine-tune,Untuk mencapai kecepatan yang sama dengan roda kanan,Sadari sinkronisasi kecepatan roda kiri dan kanan,Menghilangkan offset;
Metode operasi koreksi:Dalam mode manual,Tekan dan tahan tombol aktifkan,Putar "Regulasi Kecepatan Motor Kecil";
Putar searah jarum jam,Tingkatkan tegangan kecepatan revolver,Peningkatan nilai koreksi penyimpangan dari layar tampilan;
Putar berlawanan arah jarum jam,Kurangi tegangan kecepatan revolver,Nilai koreksi penyimpangan tampilan berkurang;
Rentang koreksi:Nilai koreksi -90 hingga 90;1Tegangan koreksi bias dari setiap unit koreksi deviasi adalah sekitar 0,02V;
9、Menu Parameter (Pengguna Melarang Modifikasi Pribadi)
Beberapa fungsi remote control dapat disesuaikan melalui parameter,Dalam mode manual,Saat kecepatan motor kecil S2 adalah 10,
Sakelar maju/terbalik ditekuk 3 kali berturut -turut,Kemudian hancurkan 3 kali berturut -turut,Masukkan menu parameter;
Keluar dari menu parameter:Pilih untuk menabung atau tidak,Kemudian tekan tombol aktifkan untuk mengonfirmasi pintu keluar;
Arus maksimum:Arus yang bekerja dari motor pemotong,Arus pemotongan adalah 80% dari arus ini;
Parameter regulasi kecepatan:Parameter kontrol pemotongan otomatis,Default 800,Modifikasi dilarang;
Parameter perlambatan:Parameter kontrol pemotongan otomatis,Saat nilai perubahan arus pemotongan melebihi nilai ini,Mulailah melambat
Akselerasi A1: Parameter kontrol pemotongan otomatis,Saat arus pemotongan lebih rendah dari arus pemotongan set,Mempercepat perlahan;
Perlambatan a2: Parameter kontrol pemotongan otomatis,Saat arus pemotongan lebih tinggi dari arus pemotongan set,Kecepatan lambat;
Koleksi Pisau Otomatis:tidak sah;
Mulailah mengunci diri:0,Jangan mengunci diri;1,Mengunci diri. Tekan tombol aktifkan + maju dan mundur untuk mulai berlaku,Dan menguncinya;
Berjalan maksimal:Kecepatan motor minimum;
Memotong arus:Atur nilai arus maksimum motor utama untuk pemotongan otomatis,Umpan balik arus melebihi nilai ini,Mulailah melambat;
Batas kecepatan default:Saat menyalakan,Kecepatan maksimum default untuk kecepatan pemotongan otomatis;
Mode otomatis:0,Sakelar otomatis adalah kontrol otomatis;1,Kontrol sakelar otomatis titik output IO otomatis;
Offset Batas Kecepatan:Saat memotong secara otomatis,Kecepatan maksimum motor kecil;
Host maksimum:Kecepatan maksimum motor besar.
| Catu daya operasi penerima | DC24V/1A (catu daya independen) |
| Beban titik output penerima | AC0-250V/3A DC0-30V/5A |
| Tegangan output regulasi kecepatan penerima |
DC0-10V
|