Crawler Rope Sawの自動切断ワイヤレスリモートコントロール
クローラーロープは、機械自動ワイヤレスリモートコントロールDH12S-LDを見ました
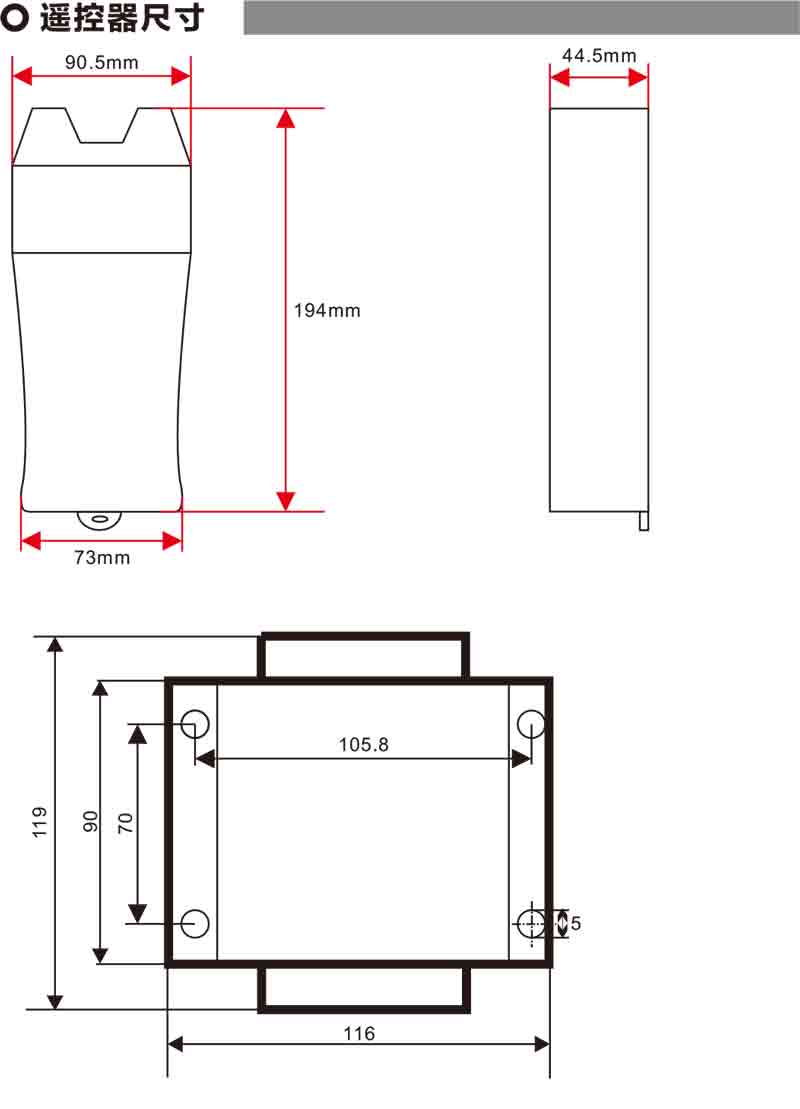
説明

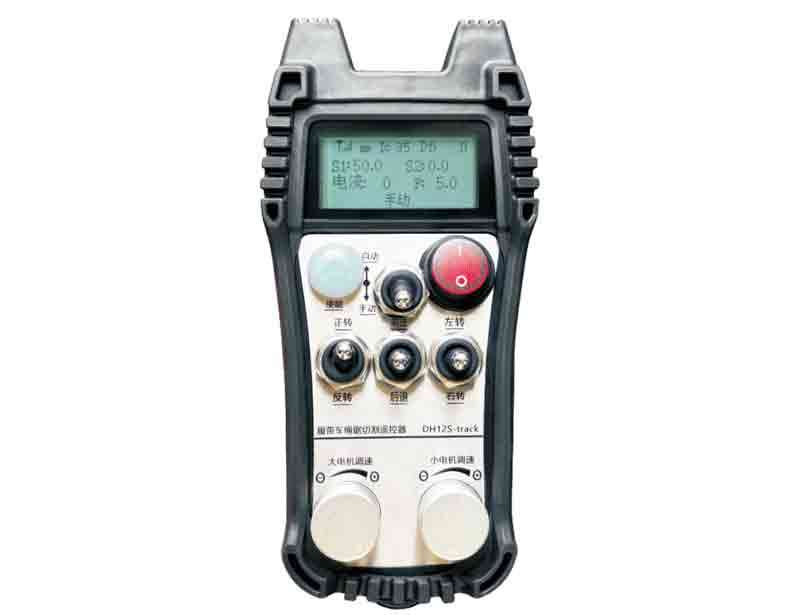
モデル:DH12S-LD 適応装置:クローラーロープソーイングマシン

述べる:3種類のアンテナを選択できます,デフォルトの吸引カップアンテナには標準が装備されています 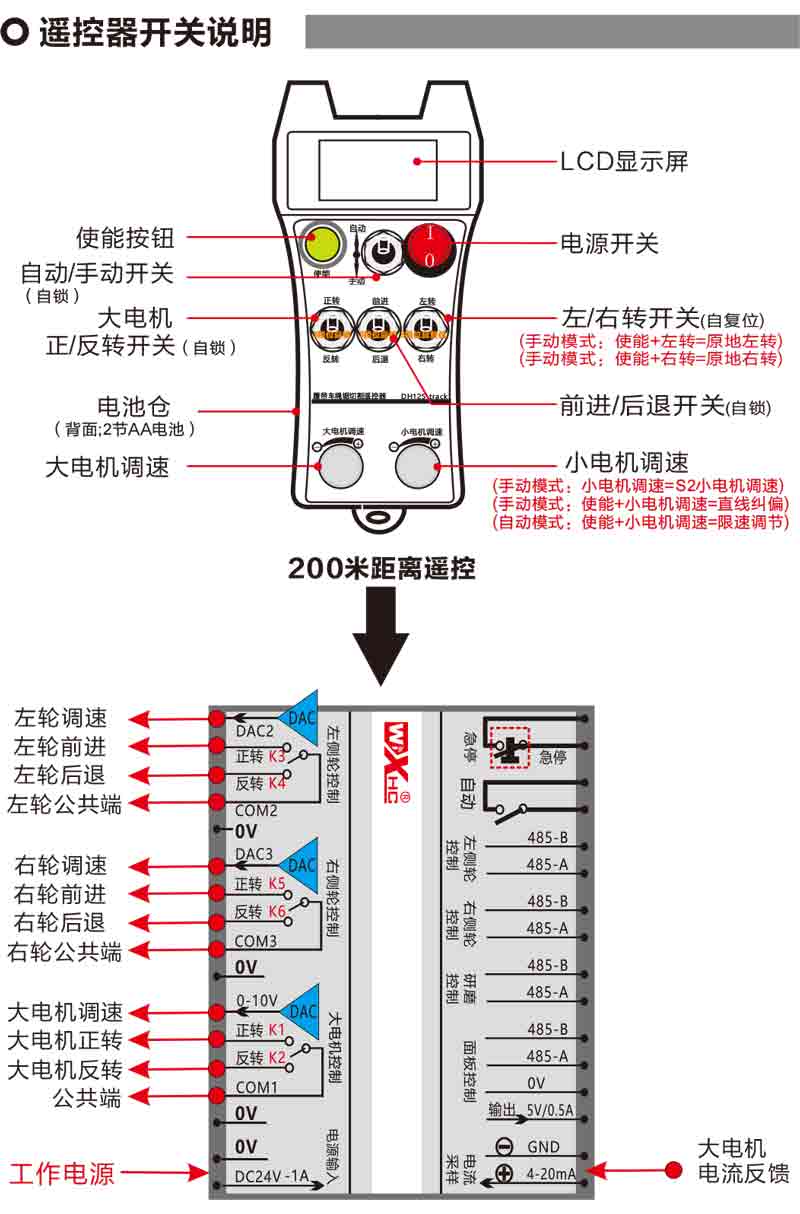

大きなモーター速度:S1:0-50
小さなモーター速度:S2:0-50
自動切断モーターの最大速度制限:f:0-30(パラメーターは調整可能です)
自動切断最大電流:IC:0-35(パラメーターは調整可能です)
線形偏差補正値:DF:-99-99(1ユニットは約0.02Vです)
低圧:リモートコントロールのバッテリーが低すぎます,バッテリーを交換してください
インターネットから落ちる:ワイヤレス信号の中断,レシーバー電源を確認してください,再び電源を入れます,リモートコントロールを再起動します
![]()
1、リモートコントロールがオンになりました
受信機は電源を入れています,受信機のRF主光が点滅し始めます;リモコンに2つのNo. 5バッテリーが設置されています,電源スイッチをオンにします,表示モーターの速度を表示します,これは、スタートアップが成功することを意味します。
2、大型モーターと速度の調節
「フォワード/リバース」スイッチをフォワードに回します,レシーバーの大きなモーターがオンになります,ディスプレイにはフォワード回転が表示されます ;
;
「フォワード/リバース」スイッチを逆にします,レシーバーの大きなモーターの反転,ディスプレイディスプレイ反転 ;
;
;「フォワード/リバース」スイッチを逆にします,レシーバーの大きなモーターの反転,ディスプレイディスプレイ反転
;「大型モーター速度調節」ノブを回転させます,受信機の出力電圧を調整できます大型モーター速度調整0-10V;
3、小さなモーターと速度の調節
「フォワード/リバース」スイッチをフォワードに回します,レシーバーリボルバーの進行と正しい進行が開かれます,前方に表示します
「フォワード/リバース」スイッチを背面に回します,レシーバーの反転と右ホイール反転が開きます,戻って表示します
手動モードで:「小さなモーター速度調節」ノブを回転させます,同時に、受信機の左ホイール右ホイール速度レギュレーション0-10Vの出力電圧を調整します;
手動モードで:「小さなモーター速度調節」ノブを回転させます,同時に、受信機の左ホイール右ホイール速度レギュレーション0-10Vの出力電圧を調整します;
4、左右に曲がります
「左/右」のスイッチを左に回します,レシーバーの右ホイールが開くように進みます,表示ディスプレイが左に曲がります
「左/右」のスイッチを右に回します,レシーバーリボルバーアドバンスが開きます,ディスプレイディスプレイが右になります
5、所定の位置に向きます
手動モードで:
左に曲がります:[イネーブル]ボタンを押し続けます,「左/右」のスイッチを左に回します,レシーバーの逆転と右ホイールの前進が開きます,所定の位置に左に曲がり始めます;
所定の位置に右折します:[イネーブル]ボタンを押し続けます,「左/右」のスイッチを右に回します,レセプタクルのリボルバーが進み、右輪バックが開きます,所定の位置に右折し始めます;
6、小さなモーター速度制限調整
自動モードで:[イネーブル]ボタンを押し続けます,「小さなモーター速度調節」を回転させて、自動切断中に小さなモーターの最大速度を調整します;
7、自動切断
最初のステップ,大きなモーターを開始します;
ステップ2,モードスイッチを「自動」に切り替えます;
ステップ3,小さなモーターを開始します,画面表示は「自動の切断」に入ります,自動切断モードが入力されたことを示します;
ステップ2,モードスイッチを「自動」に切り替えます;
ステップ3,小さなモーターを開始します,画面表示は「自動の切断」に入ります,自動切断モードが入力されたことを示します;
8、直線補正
左右のモーターが前後に動いているとき,左右の速度に違いがあります,ストレートラインウォーキングはオフセットです,リモコンの線形偏差補正関数を使用できます,左車輪と右車輪の速度を微調整します;
修正の原則:バイアス補正機能を介して,リボルバー速度を微調整します,右ホイールと同じ速度を達成するため,左と右のホイール速度の同期を実現します,オフセットを排除します;
修正操作方法:手動モードで,[イネーブル]ボタンを押し続けます,「小さなモーター速度調節」を回転させる;
時計回りに回転します,リボルバー速度電圧を上げます,ディスプレイ画面の偏差補正値の増加;
反時計回りに回転します,リボルバー速度電圧を下げます,ディスプレイ偏差補正値が低下します;
補正範囲:修正値-90〜90;1各偏差補正ユニットのバイアス補正電圧は約0.02Vです;
9、パラメーターメニュー(ユーザーはプライベートの変更を禁止)
リモートコントロールの一部の機能は、パラメーターを介して調整できます,手動モードで,小さなモーターS2の速度が10の場合,
フォワード/リバーススイッチは連続して3回曲がっています,その後、3回続けて壊します,パラメーターメニューを入力します;
パラメータメニューを終了します:保存するかどうかを選択します,次に、[Enable]ボタンを押して終了を確認します;
最大電流:切断モーターの動作電流,切断電流はこの電流の80%です;
速度規制パラメーター:自動切断制御パラメーター,デフォルト800,変更は禁止されています;
減速パラメーター:自動切断制御パラメーター,切断電流の変化値がこの値を超える場合,減速を開始します
加速A1: 自動切断制御パラメーター,切断電流が設定された切断電流よりも低い場合,ゆっくりとスピードアップします;
減速A2: 自動切断制御パラメーター,切断電流が設定された切断電流よりも高い場合,低速;
自動ナイフコレクション:無効;
セルフロックを開始します:0,自分をロックしないでください;1,セルフロック。 enableキー +フォワードと逆を押して有効になります,そしてそれをロックします;
最大のウォーキング:最小モーター速度;
カット電流:自動切断のためにメインモーターの最大電流値を設定する,フィードバック電流はこの値を超えています,減速を開始します;
デフォルトの速度制限:電源を入れるとき,自動切断速度のデフォルトの最大速度;
自動モード:0,自動スイッチは自動制御です;1,自動スイッチ制御自動IO出力ポイント;
速度制限オフセット:自動的に切断するとき,小さなモーターの最大速度;
最大ホスト:大きなモーターの最大速度.
| 受信機の動作電源 | DC24V/1A(独立電源) |
| レシーバー出力ポイント負荷 | AC0-250V/3A DC0-30V/5A |
| 受信速度レギュレーション出力電圧 |
DC0-10V
|