

Crawler Rope Sawの自動切断ワイヤレスリモートコントロール
トラックカーロープは、リモコンDH22S-LD-485を切断しました
説明

1.製品紹介
クローラーワイヤーソー自動切断リモコンはクローラーワイヤーソー切断機に適しています,485Modbus RTU プロトコルは、左右のクローラ インバータの速度調整開始と前後左右の方向制御に使用されます。,そして大型モーター周波数変換器速度調整開始。また、大型モーター インバーターの動作電流は、485-Modbus RTU プロトコルを通じて読み取ることができます。,モーター大電流の解析と比較,左右のトラックの速度をリアルタイムで自動的に調整します,自動カット機能を実現。
2.製品の特徴
1.433MHzワイヤレス通信技術を採用します,ワイヤレス動作距離 100 メートル。
2.自動周波数ホッピング関数を採用します,32セットのワイヤレスリモートコントロールを同時に使用する,お互いに影響はありません。
3.485 Modbus RTU プロトコルを備えたすべての周波数コンバータをサポート,現在採用されているインバーターのブランドは次のとおりです。:上海謝林、富士、恵川、中陳、誘致、安川達。ブランドが適合しない場合は、カスタマイズについてお問い合わせください。。
4.大型モーターの周波数コンバーターの速度調整をサポート、起動する、現在の測定値。
5.左右のクローラインバータ速度調整をサポート、起動する、前後左右のコントロール。
6.左右のクローラインバータの線形補正をサポート,機械を直線的に動かし続ける。
7.ワイヤーソー自動切断機能対応,大電流モーター情報によると,左右のトラックの速度をリアルタイムで自動的に調整します。
8.モーターの起動・停止を制御するダイレクトIO出力にも対応しています。,アナログ電圧出力でモーター速度を制御。
3.製品仕様
| ハンドヘルド端子作業電圧と電流 | 2単三電池-3V/10mA |
| 受信機の動作電圧と電流 | 24V/1A |
| ハンドヘルド送信電力 | 15DBM |
| 受信者は感度を受け取ります | -100DBM |
| ワイヤレス通信頻度 | 433MHz周波数帯域 |
| 動作温度 | -25℃<x<55℃ |
| アンチフォールの高さ | 国家のテスト基準に準拠しています |
| 防水レベル | IP67 |
| 製品サイズ | 225*84*58(mm) |
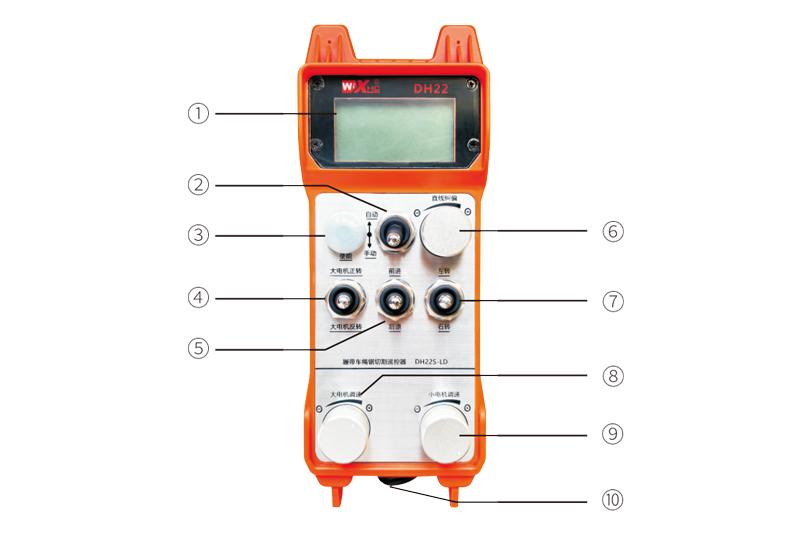
4.製品機能紹介
コメント:
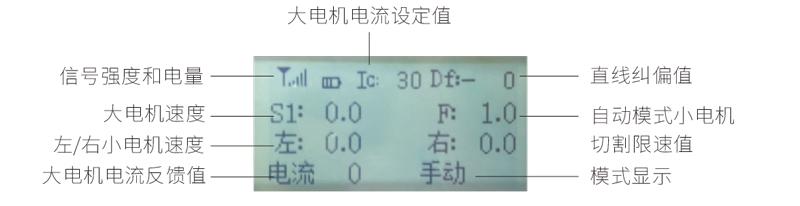
①画面表示:
②モードスイッチ:
2スピードスイッチを採用,自動モードと手動モードを切り替えることができます,ディスプレイには対応するモード表示スイッチがあります。。
③有効にする:
組み合わせボタン,一部の操作では、有効化ボタンを押し続ける必要があります。,詳細については、各スイッチの説明を参照してください。。
④大型モータースイッチ:
3スピードリセットスイッチを採用,このスイッチを入れてください,大型モーターの正逆回転制御が可能,手放した後もステータスは残ります,ディスプレイ上に対応する表示が表示されます,S1↑矢印は正転を示します,S1↓ 矢印は反転を示します。
⑤小型モーター正逆スイッチ:
3スピードセルフロックスイッチを採用,有効化ボタンを押してスイッチを切り替えます,小型モーターを制御して前後に動かすことができます,ディスプレイ上に対応する表示が表示されます,↑↑矢印は前方を示します,↓↓矢印は戻る方向です。
⑥直線偏差補正:
マルチターンエンコーダーノブの使用,有効化ボタンを押します,ノブを右に回す,直線補正表示:DF:左,ノブを回すごとに 1 単位ずつ増加します。,左側のモーター速度が 0.1 単位ずつ増加します;ノブを左に回す,直線補正表示:DF:右,ノブを回すごとに 1 単位ずつ増加します。,適切なモーター速度は 0.1 単位ずつ増加します。
⑦小型モーター回転スイッチ:
3スピードリセットスイッチを採用,マニュアルモードでこのスイッチをオンにします,小型モーターを制御して左右に回転させることができます,リモコンを放すと、この動作は自動的に停止します。。前進状態,このスイッチを入れてください,ディスプレイ上に対応する表示が表示されます,←↑矢印は左折を示します,↑→矢印は右折を示します。撤退状態,このスイッチを入れてください,ディスプレイ上に対応する表示が表示されます,←↓矢印は左折を示します,↓→矢印は右折を示します。
⑧大型モーターの速度調整:
マルチターンエンコーダーノブの使用,毎回 1 フレーム回転します,大きなモーター速度値は約 0.2 単位で変化します,高速回転により、大きなモーター速度値をすぐに変更できます。。
⑨小型モーターの速度調整:
マルチターンエンコーダーノブの使用,手動モードで,有効化ボタンを押します,その後、毎回 1 フレーム回転します,左右の小型モーターの速度値が約0.1単位で変化します,高速回転により、小型モーターの速度値を素早く変更できます。。自動モードで,有効化ボタンを押します,その後、毎回 1 フレーム回転します,小モータ速度制限値Fは約0.1単位で変化します,高速回転により小型モーターの速度制限値を素早く変更できます。。
⑩リモコン電源スイッチ:
リモコン表示電源オン。
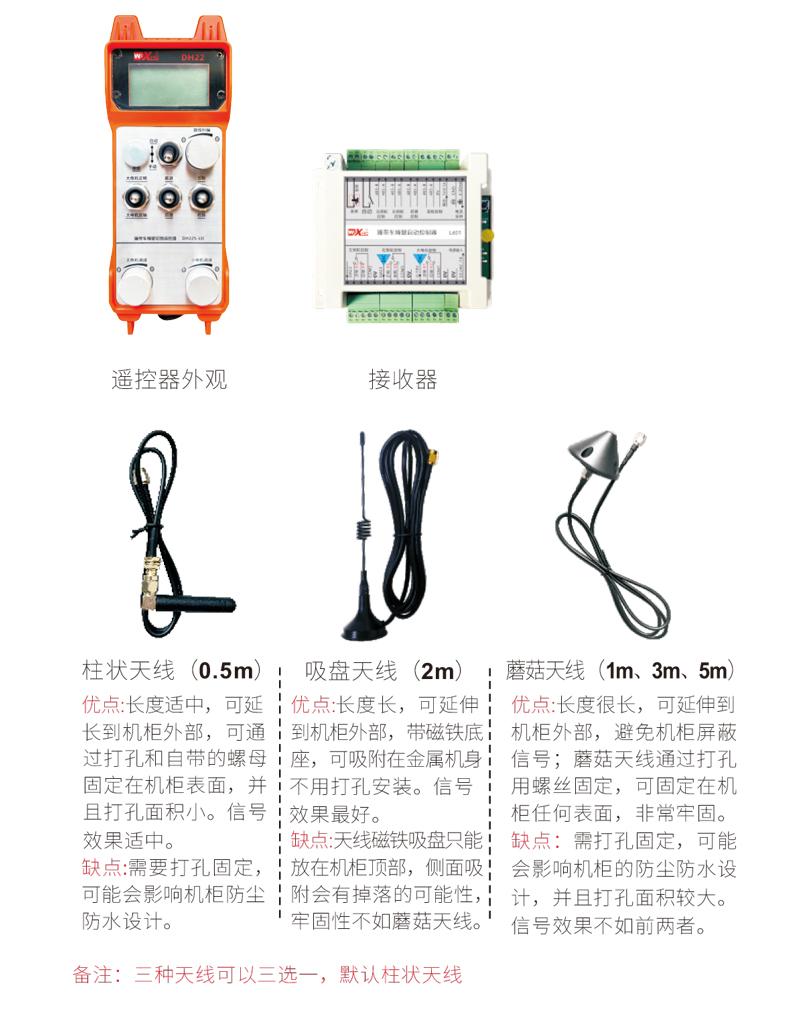
5.製品付属品図
6.製品インストールガイド
6.1製品のインストール手順
6.1製品のインストール手順
1.後ろのスナップオンから電気キャビネットにレシーバーを取り付けます,または、レシーバーの四隅にあるネジ穴から電気キャビネットに取り付けます。。
2.レシーバー配線図を参照してください,オンサイトの機器を比較してください,デバイスを有線で受信機に接続します。
3.受信機が固定された後,受信機を装備したアンテナを接続する必要があります,アンテナの外側の端を取り付けるか、電気キャビネットの外に置きます,電気キャビネットの上部に信号を配置することをお勧めします。,アンテナを外すことは許可されていません,あるいはそうするだろう
アンテナは電気キャビネット内に設置されています,信号が使用できなくなる場合があります。
4.最後にリモコンに電池を入れます,電池カバーを締めます,次に、リモコンの電源スイッチをオンにします,リモコンのディスプレイには、通常の動作インターフェイスが表示されます。,リモコン操作が可能です。
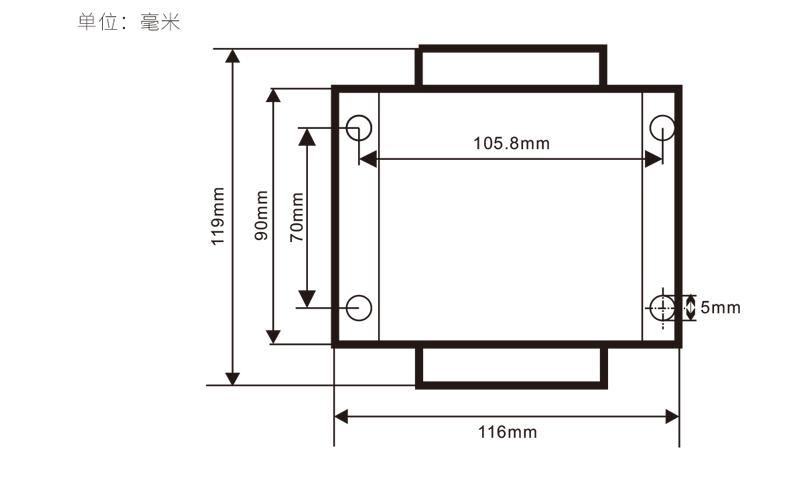
6.2受信機のインストールサイズ
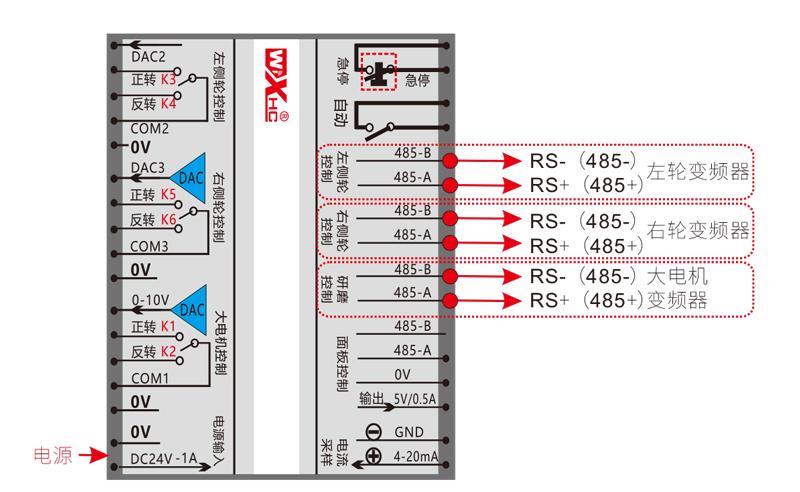
6.3レシーバー配線参照図
7.製品の取扱説明書
7.1リモコンのパラメータ設定
リモコンのバックグラウンドパラメータメソッドを入力してください:モードスイッチを手動モードに移動します,小型モーターの速度は左右で25に調整されています,あるいは両方とも 0、10、20、40、50,大型モーターの正転スイッチを上に3回連続で引く,3回連続で引き下げる;
「小型モーター速度調整」ノブを使ってページをめくる,Enableを押した後、小さなモーター速度制御ノブを回してパラメータを変更します。;
修正後,ページを最後までめくってください,「保存して終了」を選択します,有効化ボタンを押してメニューを終了します;
パラメータは次のとおりです:
最大電流:モータ電流フィードバック値の範囲が広い,設定範囲 15~200A,デフォルト 100;
速度規制パラメーター:自動モード小型モーターが自動的に速度を加速します,小さいほど速い,設定範囲 200~1500,デフォルト800;
減速パラメーター:許容されるモーター速度の変更の上限を設定します,電流変化がこの値を超えると,遅くなります。
小さいほど,左右のモーターの減速が速くなります,範囲05~12,デフォルト06;
加速A1:モーターが大きいほど、速度は速く上がります。,範囲00~06,デフォルト01;
減速A2:モーター速度が大きいほど、速度は速く低下します。,範囲00~06,デフォルト02;
速度調整を有効にする:小型モーターの速度を調整するには有効を押す必要がありますか?,00無効にする,01有効にする,デフォルト01;
セルフロックを開始します:大型モーターは正逆スイッチを放した後も自動的にセルフロックを維持しますか?,00維持しない,01保つ,デフォルト01;
最大のウォーキング:左右モーターの最高速度,範囲 10 ~ 100,デフォルト 50;
カット電流:最大切断電流,画面にはIC値が表示されます,範囲 15 ~ 160,デフォルト 30,画面対応表示IC:30。このパラメータの上限 = 最大電流 x 80%;
デフォルトの速度制限:初期設定の小型モーター起動時の自動切断速度,範囲 00 ~ 100,デフォルト 10,画面にはそれに応じて F1.0 が表示されます,このパラメータは、最大歩行数が 50 に設定されている場合にのみ正確です。。
自動モード:00に設定,自動/手動切り替えはモード切り替えです,01に設定,自動/手動スイッチを自動の位置にします。,ディスプレイ ディスプレイ照明,受信機の自動端子出力閉鎖,ヒットマニュアル,出力端子自動切断;
速度制限オフセット:小型モーター自動切断速度上限,範囲 00 ~ 200,デフォルト 60,画面はディスプレイ6.0に対応;表示値上限=速度制限オフセット×0.1;
最大ホスト:大型モーターの最高速度,範囲 10 ~ 100,デフォルト 50;
mbus デバイス (必須):大型モータインバータ機種選定,範囲00~03,デフォルト03;
00-上海謝林01-Fuji
02-INVT 03-恵川(中城)、ロビン・カン)
sbus デバイス (必須):小型モータインバータ機種選定,範囲00~05,デフォルト03;
00-上海謝林01-Fuji
02-INVT 03-恵川(中城)、ロビン・カン)
04-安川 Da 05-なし
7.2周波数変換器のパラメータ設定
1.コマンドソースの選択:通信コマンドチャネル
2.メイン周波数源の選択:与えられたコミュニケーション
3.ボーレート:19200
4.データ形式:チェックサムなし,データ形式<8-N-1>
5.ローカルアドレス:左側の周波数コンバータは 1 に設定されています,右側の周波数コンバーターは 2 に設定されています,大型モーターインバーターを3に設定
7.3リモコンの取扱説明書
1.マシンは搭載されています,リモートコントロールがオンになりました,リモコンの背景を入力してください,リモコンのバックグラウンドパラメータを設定する,主要
小型モーターと大型モーターのインバーター型式を設定します(機械メーカーが設定している場合はこの手順を飛ばしてください);
2.インバーターのパラメーターを設定します (機械メーカーが設定している場合は、この手順をスキップしてください)。;
3.リモコンを手動モードに切り替えます,次に、リモコンを使用して機械を作業位置に移動します。;
4.手動モードで,大モータカット電流設定値ICを設定する,モーターの最大速度を設定します;
5.自動モードに切り替える,小型モータの切断速度制限F値を設定します;
6.自動モードで,ビッグモータースイッチを順方向に回すとビッグモーターが始動します,次に、小さなモータースイッチをオンにします。
前進または後進ギア,リモコンが自動切断モードに入ります,切断を開始します。
8.製品のトラブルシューティング
| 障害の状況 | 考えられる原因 |
トラブルシューティング方法
|
|
電源スイッチを押します,
オン /オフにすることはできません,
ディスプレイは明るくなりません
|
1.バッテリーはリモートコントロールに取り付けられていません
または、バッテリーの方向が誤って取り付けられています
2.バッテリー電源が不十分です
3.リモートコントロールの障害
|
1.リモートコントロールのバッテリーインストールを確認してください
2.交換用バッテリー
3.メーカーに連絡して、メンテナンスのために工場に戻ってください
|
|
リモートコントロールがオンになりました,
ネットワーク障害や緊急停止も表示!
もう一度試してください。
|
1.受信機は駆動されていません
2.レシーバーアンテナが取り付けられていません
3.リモコンとマシンの間の距離は遠すぎます
4.環境干渉
5.リモコンの電源を入れる前に,最初に受信機の電源を入れる必要があります,もう一度リモコンの電源を入れてください
|
1.レシーバーの電源をオンにします
2.レシーバーアンテナを取り付けます,電気キャビネットの外側にアンテナの外側の端を取り付けて、それを修正します
3.通常の距離での操作
4.section電気キャビネットの配線を最適化します,受信機のアンテナ配線は 220V 以上の電線からできるだけ離してください。 ② 受信機電源は独立したスイッチング電源を使用するようにしてください。,また、電源コードに電源絶縁モジュールと磁気リングを追加します。,干渉防止能力を向上させます
|
|
リモートコントロールがオンになりました,バッテリーの充電を表示
|
1.バッテリー電源が不十分です
2.バッテリーの設置または連絡先が不十分です
|
1.交換用バッテリー
2.バッテリーの設置を確認してください,電池収納部の両端の金属シートに汚れや異物がないか,それをきれいにします
|
|
リモコンの一部のボタン
もしくはスイッチが反応しない
|
1.スイッチ破損故障
2.受信機の損傷障害
|
1.スイッチを入れるときに注意してください,表示画面上に対応する矢印はありますか?;矢印が表示されています,スイッチが正常であることを示します;矢印が表示されない場合は、スイッチが故障していることを意味します。,工場のメンテナンスに戻ります
2.工場のメンテナンスに戻ります
|
|
受信機の電源を入れた後,受信機に光はありません
|
1.電源異常
2.電源配線エラー
3.受信障害
|
1.電源に電圧があるかどうかを確認してください,電圧は要件を満たしていますか
2.電源の正と負の極が逆に接続されているかどうかを確認します
3.工場のメンテナンスに戻ります
|
9.メンテナンスとケア
1.室温と圧力でお願いします,乾燥した環境で使用されます,サービスの寿命を延ばします。
2.雨の中で濡れないでください、水疱などの異常な環境で使用されます,サービスの寿命を延ばします。
3.バッテリーコンパートメントと金属破片エリアを清潔に保ってください。。
4.リモコンを強く握ったり、落としたりすると破損の原因となりますので、ご注意ください。。
5.長い間使用されていません,バッテリーを取り外してください,リモートコントロールとバッテリーを清潔で安全な場所に保管してください。
6.貯蔵および輸送中の湿気と衝撃防止に注意してください。
10.安全に関する情報
1.使用する前に使用するための手順を読んでください,非専門家の職員は禁止されています。
2.バッテリーが低すぎるときにバッテリーを交換してください,バッテリー残量不足によってリモコンが操作できなくなるエラーを回避します。。
4.修理が必要な場合,メーカーに連絡してください,自己修復によって引き起こされる損傷の場合,メーカーは保証を提供しません。


-500x650.png)


