
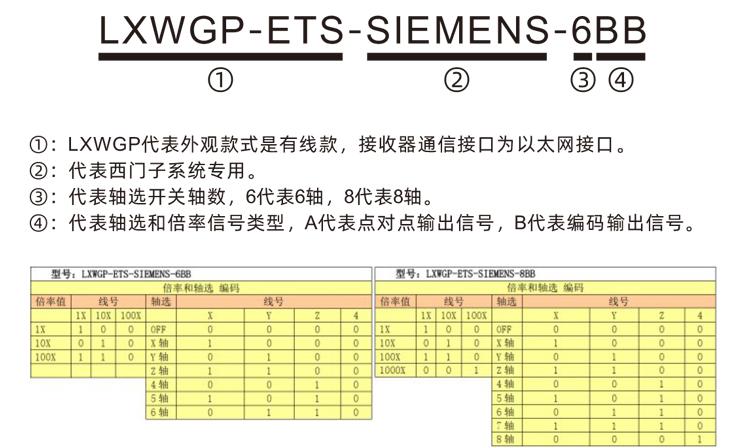
LXWGP-ETS-Siemens Winting Handwheel
Katrangan


Handwheel elektronik digunakake kanggo panuntun manual alat mesin CNC、Posisi、Operasi Strike。Model handwheel elektronik iki minangka handwheel elektronik kabel Siemens kanthi tampilan nyata.,Handwheel disambungake menyang antarmuka X130 saka sistem Siemens liwat kabel jaringan.,Maca koordinat sistem lan nampilake menyang tampilan LCD saka handwheel liwat komunikasi protokol S7.,Lan pilihan sumbu sistem kontrol handwheel bisa digawe liwat komunikasi.、Magnifikasi、Tombol lan sinyal liyane。

1.Disambungake nggunakake kabel plug penerbangan 6-inti,Kabel Handwheel dawane 10 meter。
2.Layar handwheel bisa nampilake koordinat workpiece sistem、Koordinat mekanik、kacepetan Feed、Pilihan axis、Informasi kayata magnification。
3.Dhukungan tombol mandeg darurat,Ngalih Output Signal IO,Stop darurat mateni Handwheel isih efektif。
4.Ndhukung 6 tombol khusus,Ngalih Signal IO,Bisa output sinyal kanggo sistem liwat kabel IO utawa komunikasi。
5.Ndhukung 6 utawa 8 kontrol sumbu,Ngalih Signal IO,Bisa output sinyal kanggo sistem liwat kabel IO utawa komunikasi。
6.Ndhukung 3 utawa 4 tingkat kontrol perbesaran,Ngalih Signal IO,Bisa output sinyal kanggo sistem liwat kabel IO utawa komunikasi。
7.Ndhukung Pulse Encoder,100Pulsa / bunder,Sinyal bisa output menyang sistem liwat kabel pulsa AB.。
8.Dhukungan protokol Siemens S7,Dhukungan Siemens 828D、840DSL、ONE lan sistem model liyane。

| Handwheel tegangan catu daya kerja | DC24V/1A |
| Voltase penerus listrik | DC24V/1A |
| Receiver IO output range beban |
DC24V
|
| Panjang kabel endwheel |
10m
|
| dawa kabel mburi panrima |
1m
|
| dawa kabel jaringan mburi panrima |
3m
|
| Suhu operasi |
-25℃<X<55℃
|
| Dhuwur Anti-Gugur |
1m
|
| Setel nomer tombol | 6indivual |
| Ukuran Produk | 233*90.7*77.4(Mm) |


Komentar:
Tombol mandeg ①mormency:
Pencet tombol mandeg darurat,Loro klompok darurat mandhegake output ing panrima ora disetelaken,Lan kabeh fungsi tangan tangan ora bener。
Sawise ngeculake mandheg darurat,Output io darurat Darurat ditutup ing panrima,Kabeh fungsi tangan tangan dibalekake maneh。
Tampilan layar:
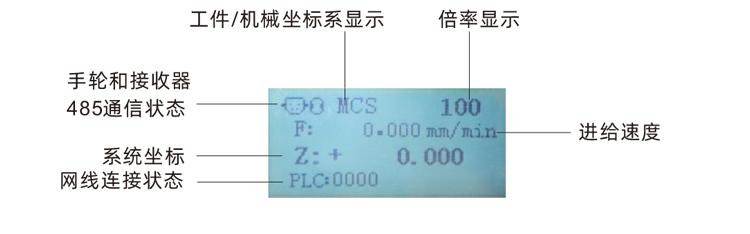
PLC:0000Iku tegese kabel jaringan ora nyambung,PLC:1010Iku tegese kabel jaringan lan sistem PLC disambungake kanthi sukses.,
PLC:1110Nuduhake yen handwheel nulis data sistem kasil.,PLC:0001Nuduhake sambungan sukses menyang komputer。
Tombol ③custom:
6Kancing Custom,Saben tombol cocog karo titik output io ing panrima,Uga disambungake menyang sistem liwat komunikasi。
Switch pilihan:
Ngalih switch Axis pilihan bisa ngalih sumbu obah sing dikontrol kanthi tangan。
⑤Aktifake tombol:
Pencet terus tombol Ngaktifake ing sisih loro,Iki mung efektif kanthi goyangake canggih。 Lan 2 set Io Output aktif ing panrima diuripake,Rilis tombol Aktifake,Ngaktifake Sambungan Output IO。
⑥Saklar pembesaran:
Ngalih switch magnification bisa ngalihake pembebasan sing dikontrol dening rodha tangan.。
⑦Encoder pulsa:
Pencet terus tombol Aktifake,Encoder Pulse Shake,Kirim sinyal pulsa,Ngontrol gerakan batang mesin。
⑧Kabel roda tangan:
Kabel nyambungake handwheel lan panrima,plug penerbangan,Kanggo sumber daya handwheel lan komunikasi。



6.1Langkah-langkah instalasi Produk
1.Pasang panrima ing kabinèt electrical liwat bolongan meneng ing papat sudhut.。
2.Rujuk diagram kabel panrima kita,Mbandhingake Peralatan Situs,Sambungake piranti liwat kabel lan panrima
nyambung,Gunakake kabel jaringan kanggo nyambungake panrima menyang antarmuka X130 sistem。
3.Sawise panrima tetep,Pasang basis plug aviation menyang bukaan handwheel ing panel,Dasar liyane
Strip terminal disambungake menyang antarmuka handwheel ing panrima.。Banjur lebokake plug aviation saka kabel mburi handwheel menyang basa,Kenceng
perlengkapan。
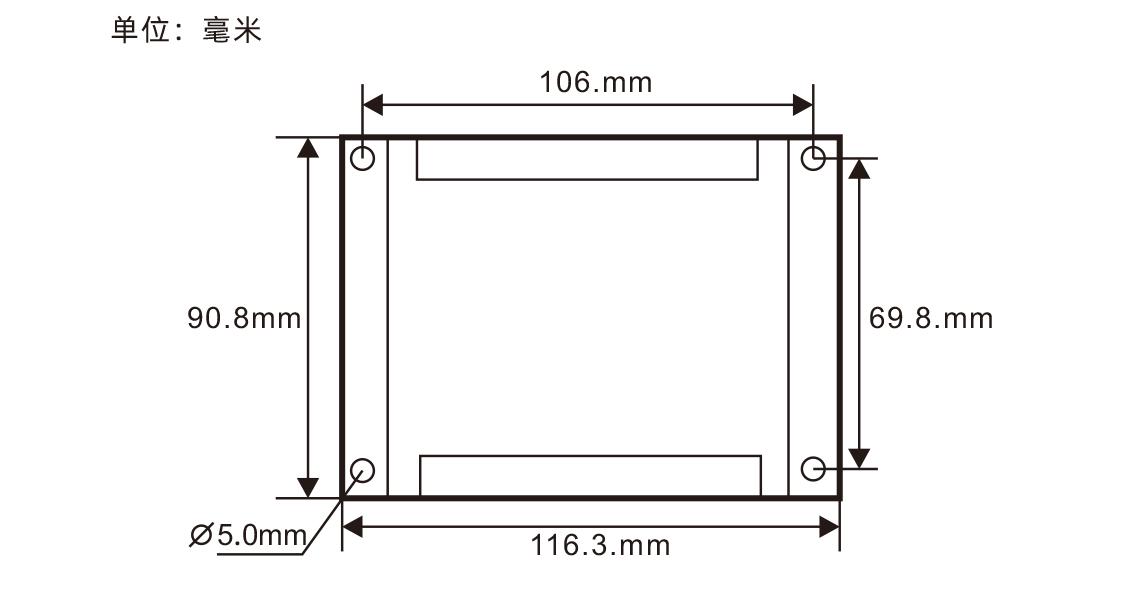
6.2Ukuran instalasi panrima
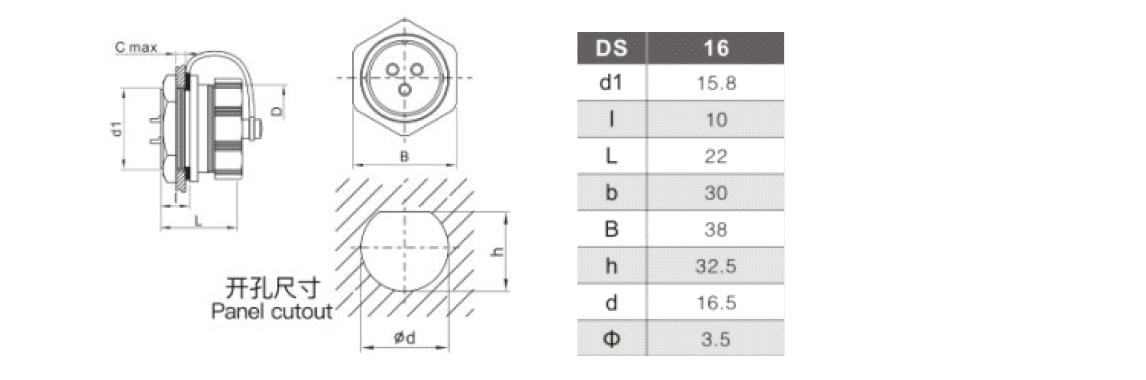
6.3Dimensi instalasi plug penerbangan
6.4Diagram referensi wiring wiring panrima

6.2Ukuran instalasi panrima
6.3Dimensi instalasi plug penerbangan
6.4Diagram referensi wiring wiring panrima

1.Panrima wis digunakake ing,Lampu operasi panrima urip,Sambungake panrima menyang komputer nggunakake kabel jaringan,Setel alamat IP tetep kanggo komputer sampeyan,Gunakake piranti lunak alat konfigurasi jaringan kanggo nyetel paramèter jaringan kanggo fungsi handwheel,Setelan tartamtu
Kanggo cara kasebut, waca "Pandhuan kanggo Nggunakake Roda Tangan Kabel LXWGP-ETS"。
2.Sawise persiyapan panrima rampung,Sistem kasebut mbutuhake program program PLC,Kanggo rincian, waca "Metode Setelan LXWGP-ETS kanggo Sistem CNC Siemens sing Beda" lan informasi rutin program PLC。
3.Sawise setelan ing ndhuwur rampung,Njupuk panrima menyang kabinèt electrical mesin lan nginstal,Copot kabel jaringan saka komputer lan copot menyang antarmuka X130 sistem,Tancepake daya panrima lan kabel pulsa。
4.Mesin kasebut dikuasai,Panrima wis digunakake ing,Lampu operasi panrima urip,Nguripake saklar daya handwheel,Handwheel layar boot,Tampilan layar PLC:1010,Nuduhake komunikasi sukses antarane handwheel lan sistem.。
5.Pilih pilihan axis:Ngalihake Pilihan Axle Milih,Pilih sumbu sing pengin digunakake。
6.Pilih multiplier:Ngalih switch,Pilih multiplier sing sampeyan butuhake。
7.Mindhah sumbu:Pencet terus tombol Aktifake,Pilih sumbu lan saklar,Pilih Ngalam Multiplayer,Banjur genti encoder pulsa,Giliran sumbu gerakan maju kanthi jam,Pateni Gerakan Axis Negatif Negatif。
8.Pencet terus tombol apa wae,Tombol sing cocog karo panrima diuripake,Output tombol rilis。
9.Pencet tombol mandeg darurat,Panrima Sambungake output iO Darurat Darurat,Fungsi tangan Handwheel gagal,Rilis tombol mandeg darurat,Output mandheg darurat ditutup,Pemulihan Fungsi Handwheel。


| Kahanan kesalahan | Sabab bisa |
Cara ngatasi masalah
|
|
|
Cara ngatasi masalah
|
1.Apa kabel penerbangan antarane handwheel lan panrima disambungake kanthi bener lan andal
2.Apa voltase daya panrima cukup?
3.Gagal handwheel
|
1.Priksa sambungan kabel penerbangan antarane handwheel lan panrima
2.Priksa daya input panrima
3.Hubungi pabrikan kanggo bali menyang pabrik kanggo pangopènan
|
|
| Ora ana respon nalika ngoperasikake roda tangan |
1.Apa kabel jaringan antarane panrima lan sistem disambungake?
2.Apa program sistem PLC ditulis kanthi apik?
3.Apa konfigurasi panrima disetel kanthi bener?
4.Apa lambang komunikasi 485 ditampilake ing tampilan handwheel gagal?
5.Nalika operasi handwheel,Sampeyan kudu menet terus tombol aktif ing loro-lorone
6.Apa tombol mandheg darurat dirilis?
|
1.Priksa manawa panrima lan port jaringan sistem X130 disambungake karo kabel jaringan
2.Priksa lan konfirmasi manawa sistem PLC ditulis miturut bahan referensi sing diwenehake.
3.Priksa manawa panrima nuduhake informasi lan piranti lunak alat sing diwenehake,Nyetel paramèter jaringan lan alamat DB panrima kanthi bener, lsp.
4.Priksa antarane handwheel lan panrima
6soket ijo inti,Loro jalur komunikasi:485-A lan 485-B,Apa disambungake kanthi bener lan aman?,Apa ana break sirkuit?
|
|
|
Sawise panrima wis ana,Lampu kerja ing panrima ora murup
|
1.Kelainan sumber daya
2.Kesalahan wiring daya
3.Gagal panrima
|
1.Priksa manawa sumber daya duwe voltase,
Apa voltase cocog karo syarat kasebut
2.Priksa apa cagak positif lan negatif saka sumber daya sing cocog karo mbalikke
3.Bali menyang pangopènan pabrik
|

1.Mangga ing suhu kamar lan tekanan,Digunakake ing lingkungan garing,Ngembangake Urip Layanan。
2.Aja nganti udan ing udan、Digunakake ing lingkungan sing ora normal kayata blister,Ngembangake Urip Layanan。
3.Tulung tulung tangan,Ngembangake Urip Layanan。
4.Aja nganti nyepelekake、Tiba、Bumping, lsp.,Nyegah aksesoris presisi ing njero tangan saka kerusakan utawa akurasi kesalahan。
5.Ora digunakake kanggo wektu sing suwe,Mangga simpen tangan ing papan sing resik lan aman。
6.Pay manungsa waé kanggo bukti-bukti kelembapan lan bukti-bukti nalika panyimpenan lan transportasi。

1.Mangga maca pandhuan kanggo nggunakake kanthi rinci sadurunge digunakake,Personel sing ora profesional dilarang。
2.Sawise kahanan ora normal ana ing handwheel,Mangga mungkasi nggunakake langsung,lan ngatasi masalah,Sadurunge ngatasi masalah,Dilarang nggunakake handwheel sing rusak maneh,Ngindhari kacilakan safety amarga gagal handwheel sing ora dingerteni;
3.Yen ndandani dibutuhake,Hubungi pabrikan,Yen karusakan sing disebabake dening ndandani dhiri,Pabrikan ora bakal menehi garansi。



-500x650.png)
