
Wireless remote control automatic secans filum vidit
Lorem secans Wireless remotis imperium filum vidit apparatus DH12s-P6s
Descriptio


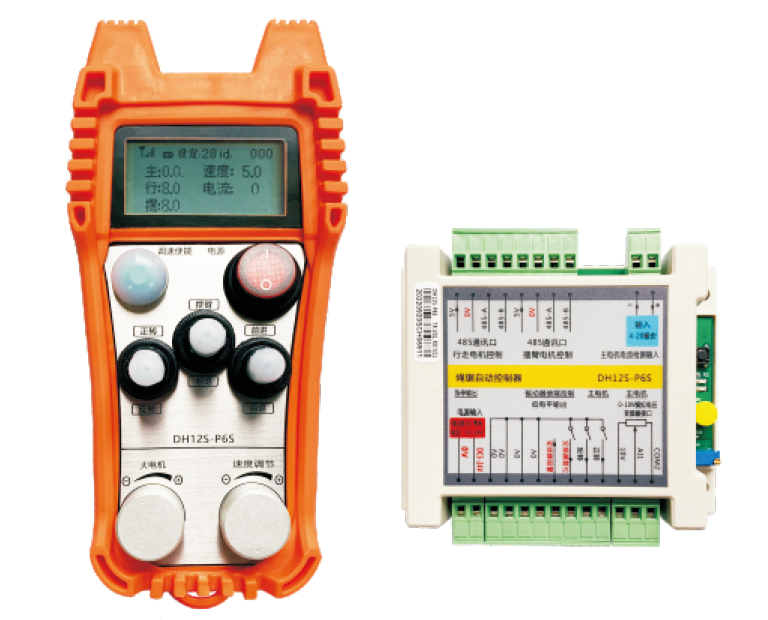
exemplar:Dh12s-P6s Adapter Equipment:Wire vidit / Mundi vidit apparatus


Adnotatio:Tria Antennas potest electus,Default Suction Cup Antenna instructum est vexillum


Main motor celeritate:exercitus:0-50
Ambulans motricium celeritate:Ok:0-50
Automatic secans ambulans motricium maximam celeritate terminum:celeritate:0-30(Quod parametri sunt Novifacta)
Automatic secans Main motor set current:profectus:28(Quod parametri sunt Novifacta)
OSCILLATIO Arm Motor celeritate:inpono:0-50

Humilis pressura:Pugna remotis imperium nimis,Placere reponere in altilium

Ex interrete:Wireless signum interruptio,Placere reprehendo recipiens potentia copia,Power in Iterum,Sileo in remotis imperium

1、Remote control conversus in
Receptor est Powered,In D2 potentia copia lux in recipientis semper,D1 Signum lux incipit ad Flash;Duo No. V batteries installed in remotis imperium,Turn in virtute switch,Display Display motricium celeritate,Hoc est in startup est felix。
2、Main motricium et celeritate ordinacione
Torcular et tenere "celeritate adjust activare",Turn "deinceps / Reverse" SWITCH PB,Pelagus motricium de recipientis est in;
Torcular et tenere "celeritate adjust activare",Turn "deinceps / Reverse" SWITCH PB,Pelagus motricium de recipientis est in;
Torcular et tenere "celeritate adjust activare",Turn in "deinceps / Reverse" Switch ad Reverse,Receptivum Main motricium revocatas;
Convertam switch directe in medium vel e converso,Pelagus motor sistit statim,Nulla necessitate ad instare celeritate ad enable eam;
Rotate "Big Motor" Knob,Celeritas ordinacione voltage de recipientis Main motor inverter potest esse adaequatum 0-10v;
3、Ambulans motricium
3、Ambulans motricium
Torcular et tenere "celeritate adjust activare",Turn in "deinceps / Reverse" switch ad deinceps vel retrorsum,Ambulans motricium movebo ad altum celeritatem L;
4、Auctura Arm Motor et celeritate ordinacione
Turn in "adductius brachium / reditus" switch ad adductius brachium et retro,Et adductius brachium motricium de recipiente incipit;Tum conversus "celeritate temperatio" Knob,Potest adjust celeritas in adductius brachium motricium;
Torcular et tenere "celeritate adjust activare",Turn in "Swing Armate / receptum" SWITCH iterum:,Et adductius brachium motor erit movere ad altum celeritate L;
5、Celeritas terminus temperatio ambulans motricium
Torcular et tenere "celeritate adjust activare" button,Rotating "celeritate temperatio" potest adjust maximam celeritate terminus de ambulando motricium per automatic secans;
6、CAECORUM
primus gradus,Satus principalis motricium;Gradus II,Adjust maximam celeritate terminum de ambulando motricium;Gradus III,Turn "deinceps / Reverse" SWITCH PRINATOR vel retrorsum,Intra automatic secans modus;
7、Parametri Occasus (users prohibere privata immutatio)
Intra parametri menu:In manual modus,Cum pelagus motor celeritate est 0,Porro / Reverse switch est inclinatum III temporibus in ordine,Tunc conteram illud III tempora in ordine,Intra parametri menu;
Exit parametri menu:Celeritas temperatio Knob Page Turn,Eligere nisi salvare,Torcular ad Admitte ipsum ad confirmandas;
Current Rated:Maximum valorem de Main motor current,Unitas ampere;
Celeritate ordinatione parametri:Automatic secans imperium parametri,Default DCCC,Unitas milliseconds,Mutatio est prohibitus;
Reticulumque parametri:Cum cutting current mutatio valorem excedit hoc valore,Satus ad torpet cursim,Unitas ampere;
Acceleratio A1:Cum autem cutting current est inferior quam set secans current,Celeritas valorem de ambulando motricium crescit ad invicem acceleratio;
A2 torpet: Cum cutting current est altior quam set secare current,Celeritas valorem de walking motricium reduces per se tempus illud decelerates;
Current Current adductius:default valorem,Mutatio est prohibitus;
Subsisto tempore:Lorem Modus Current ONERO Post shutdown,In current deprehenditur iterum omnis semel in a dum,Si minus quam positus current,Automatice incipit ambulans motricium;Unitas seconds,default valorem,Mutatio est prohibitus;
Subsisto tempore:Lorem Modus Current ONERO Post shutdown,In current deprehenditur iterum omnis semel in a dum,Si minus quam positus current,Automatice incipit ambulans motricium;Unitas seconds,default valorem,Mutatio est prohibitus;
Maximus current:Range of Feedback Current of Main motricium,Unitas ampere;
Maximum exercitum:Celeritas Imperium Display Range of Longinquus Imperium Main Motor;
Maximum ambulans:Aliquam parametri;
Celeritate terminum offset:Cum cutting automatice,Celeritate terminum de peregrinatione motricium in remote control ostentationem = L% of hoc modularis;
ADFRIGERATIO:Cum feedback current de principalis motricium crescit,De valore auctus per tempus excedit hoc valore,Ambulans motor acceleratio;
Redigo sensibilitate:Main motricium videre current decrescit,Valorem reducitur quisque tempus excedit hanc valorem,Ambulans motricium retardat;
Sensus Offset:Et offset incremento addendo et subtrahendo sensitivity parametri;
Set current:CAECORUM,In limine ad feedback current de Main motricium,Plus quam hoc valore,Ambulans motor incipit tardius;Infra hanc valorem,Ambulans motricium incipit accelerate;Unitas ampere;
Set current:CAECORUM,In limine ad feedback current de Main motricium,Plus quam hoc valore,Ambulans motor incipit tardius;Infra hanc valorem,Ambulans motricium incipit accelerate;Unitas ampere;
Vacua:Quando autem automatic modus incipit,Si feedback current de principalis motricium est minus quam hoc valore,Vacua,Maior quam valore,Exitus inanis modus,Intra secans modus,Unitas ampere;
Non onus current:Quando autem automatic modus incipit,Si feedback current de principalis motricium est minus quam hoc valore,In non onus modus,Maior quam valore,Exitus non-onus modus,Intra secans modus,Unitas ampere;
CELESCO:Celeritas initial Auctius Armate Motor Satus;
Secans modus:Switch inter ferrum vidit et filum vidit,Post switching parametri, et parametri etiam switched sic erit.;In ferrum vidit modus,Longinquus imperium ostentationem addit adductius brachium motor,Non est nihil adductius motricium in filum vidit modus;
Somno tempore:Cum feedback current de principalis motricium excedit in subsisto current,Feedback current et deprehendi continuously,Debounce tempus est durationem continua deprehendatur,Plus hoc,Deprehendere principalis motor current adhuc excedit ad subsisto current,ambulateEt motricium non prohibere;Alioquin ambulans motricium et continue procedere;
Current nolite:In feedback current de principalis motricium excedit hoc valore,Et ambulans motor non prohibere;Unitas ampere;
Default offset:Initial valorem celeritas terminum de iter motricium cum remote control est in = L% de hac valore;
![]()
| Reciperit operating potentia copia |
DC24V / 1a (Lorem Power copia)
|
| Receptor output parte onus | AC0-250V / 3A DC0-30V / 5A |
| Receptoris celeritate ordinatione output intentione | Dc0-10v |

Quod ultima ius interpretari productum pertinet ad Chengdu Xinshen Technology Co., Ltd.。




