
Control remoto inalámbrico de corte automático para sierra de cuerda rastreadora
DH12S-2R-LD-485 Cuerda de rastreo Corte de sierra controlado control remoto
Descripción


Control remoto de corte automático para sierras de alambre de rastreador adecuadas para máquinas de corte de sierra de alambre de rastreador,Use el protocolo 485Modbus RTU para controlar los convertidores de frecuencia de rastreadores izquierdo y derecho,Así como el arranque de la velocidad de conversión de frecuencia de motor grande y el controlador de dirección de la izquierda en el trasero。Y la corriente de funcionamiento del inversor motor grande se puede leer a través del protocolo RTU 485-Modbus,Análisis y comparación de la corriente de motores grandes,Ajuste automáticamente la velocidad de la pista izquierda y derecha en tiempo real,Implementar la función de corte automático。

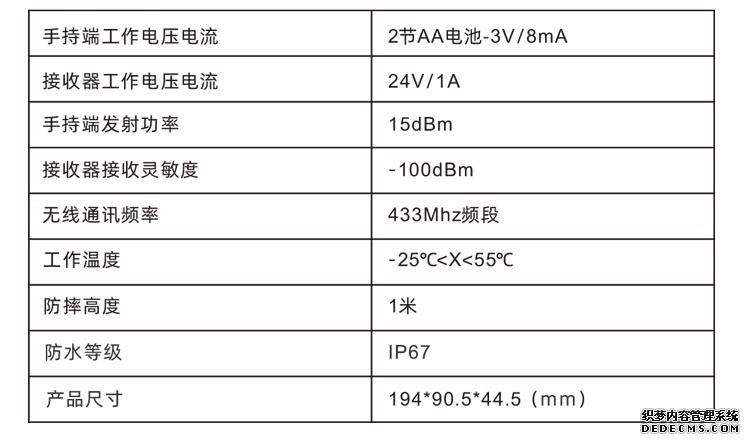
1.Adoptar tecnología de comunicación inalámbrica de 433MHz,Distancia de operación inalámbrica 100 metros。
2.Adoptar la función de salto de frecuencia automática,Use 32 conjuntos de controles remotos inalámbricos al mismo tiempo,No hay efecto el uno en el otro。
3.Admite todos los convertidores de frecuencia con 485-Modbus RTU Protocolo,Actualmente, las marcas de inversores adaptadas incluyen: Shanghai Xielin、Fuji、Huichuan、Zhongchen、Injurido、Yaskawa Tatsu。Si no tiene una marca, contáctenos para personalizarla.。
4.Admite el arranque de grandes inversores de motores、Ajuste de velocidad、Lectura actual。
5.Admite la regulación de velocidad de los inversores de rastreadores izquierdo y derecho、puesta en marcha、Control delantero, trasero, izquierdo y derecho。
6.Admite la corrección de desviación lineal de los inversores de rastreadores izquierdo y derecho,Mantenga la máquina funcionando en línea recta。
7.Admite la función de corte automática de la sierra de alambre,Según la información de corriente motor grande,Ajuste automáticamente la velocidad de la pista izquierda y derecha en tiempo real。
8.También admite la salida de IO directa para controlar la parada de arranque del motor,Controles de salida de voltaje analógico Velocidad del motor。



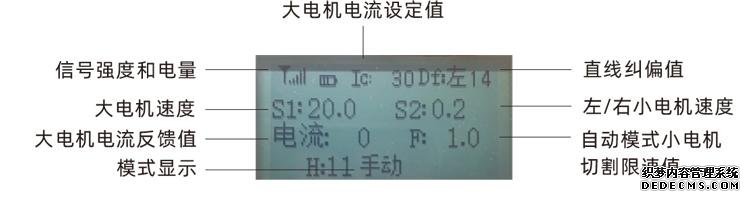
Comentario: ① Pantalla de pantalla:
② Switch Mode:
Use un interruptor de 2 velocidades,Puede cambiar entre modos automáticos y manuales,Habrá un interruptor de modo correspondiente en la pantalla。
③ Habilitar:
Botones combinados,Algunas operaciones requieren que presione y mantenga presionado el botón Habilitar para operar,Vea las instrucciones para cada interruptor。
④ Interruptor de motor grande:
Use un interruptor de reinicio de 3 velocidades,Gire este interruptor,Puede controlar la rotación hacia adelante e inversa de motores grandes,Después de dejar ir, el estado permanecerá,Habrá una pantalla correspondiente en la pantalla,↑ flecha indica rotación positiva,↓ Flecha indica la inversión。
⑤ Interruptor de avance/reverso del motor pequeño:
Adoptar un interruptor de auto-bloqueo de 3 velocidades,Gire este interruptor,Puede controlar el avance y el retroceso de los motores pequeños,Habrá una pantalla correspondiente en la pantalla,↑ flecha indica progreso,↓ flecha indica hacia atrás。
⑥ interruptor de encendido de control remoto:
El valor de velocidad del motor grande cambia en aproximadamente 0.2 unidades, Use la perilla de codificador de múltiples vueltas,Girar la perilla,Ajuste la gran velocidad del motor S1。1 caja por rotación, La rotación rápida puede modificar rápidamente el gran valor de velocidad del motor。
⑦ Interruptor de giro del motor pequeño:
Use un interruptor de reinicio de 3 velocidades,Gire este interruptor en modo manual,Puede controlar el giro izquierdo y derecho del motor pequeño,Después de relajarse, el control remoto detendrá automáticamente esta acción。 En el estado anticipado,Gire este interruptor,Habrá una pantalla correspondiente en la pantalla,← Las flechas indican el giro a la izquierda,→ Flecha significa girar a la derecha。 En el estado atrasado,Gire este interruptor,Habrá una pantalla correspondiente en la pantalla,← Las flechas indican el giro a la izquierda,→ Flecha significa girar a la derecha。 Mantenga presionando habilitar,Luego gire el interruptor,Puede realizar la función de giro en el sitio,Girar más rápido。
⑧ Gran regulación de velocidad del motor :
El valor de velocidad del motor grande cambia en aproximadamente 0.2 unidades, Use la perilla de codificador de múltiples vueltas,Girar la perilla,Ajuste la gran velocidad del motor S1。1 caja por rotación, La rotación rápida puede modificar rápidamente el gran valor de velocidad del motor。
⑨ Regulación de velocidad del motor pequeño:
(Corrección de línea recta) Use la perilla del codificador de múltiples vueltas,En modo manual,Una caja para cada rotación de la perilla,El valor de velocidad del motor pequeño cambia en aproximadamente 0.1 unidad,La rotación rápida puede modificar rápidamente el pequeño valor de velocidad del motor。En modo automático,Presione el botón Habilitar,Luego gire 1 bloque cada vez,El valor del límite de velocidad F del motor pequeño cambia en aproximadamente 0.1 unidad,La rotación rápida puede modificar rápidamente el límite de velocidad de los motores pequeños。Presione el botón Habilitar,Girar la perilla derecha,Pantalla de corrección lineal:Df:izquierda,Agregar 1 unidad por unidad de perilla;Girar la perilla izquierda,Pantalla de corrección lineal:Df:bien,Agregar 1 unidad por unidad de perilla;Cada unidad de corrección de desviación corresponde al voltaje AVI de la regulación de la velocidad del motor de aproximadamente 0.02V。



Pasos de instalación de productos
1.Instale el receptor en el gabinete eléctrico a través del Snap-On en la parte posterior,O instálelo en el gabinete eléctrico a través de los agujeros de los tornillos en las cuatro esquinas del receptor.。
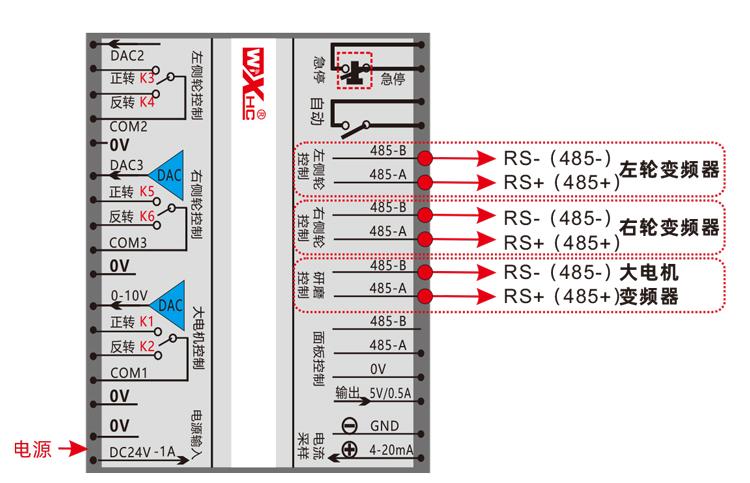
2.Consulte nuestro diagrama de cableado del receptor,Compare su equipo en el sitio,Conecte el dispositivo a través de cables y receptores。
3.Después de que el receptor sea arreglado,La antena equipada con el receptor debe estar conectada,E instale el extremo exterior de la antena o colóquela fuera del gabinete eléctrico,Se recomienda colocar la señal en la parte superior del gabinete eléctrico.,No se le permite desconectar la antena,O coloque la antena dentro del gabinete eléctrico,Puede hacer que la mala señal sea inutilable。
4.Finalmente instale la batería en el control remoto,Tapa de la batería apretada,Luego encienda el interruptor de encendido de control remoto,La pantalla de control remoto mostrará la interfaz de trabajo normal,Puede realizar la operación de control remoto。
Tamaño de instalación del receptor
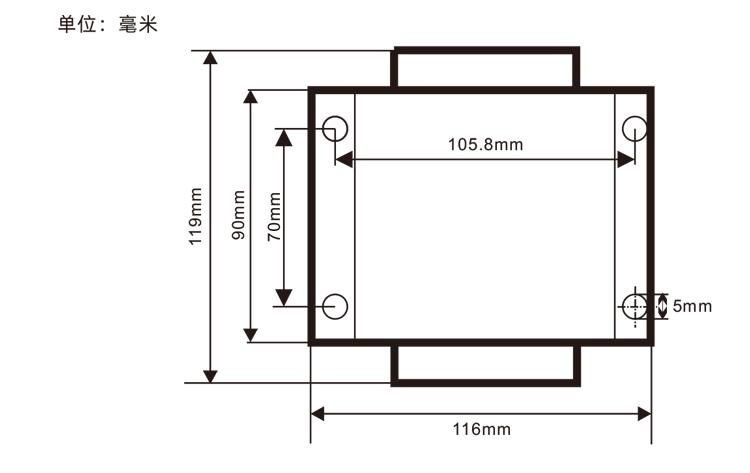
Diagrama de referencia de cableado del receptor

Configuración de parámetros de control remoto
Método para ingresar el parámetro de fondo del control remoto:El interruptor de modo se convierte en modo manual,La velocidad del motor pequeño se ajusta a 25, O 0、10、20、40、50,El interruptor hacia adelante del motor grande se eleva hacia arriba durante 3 veces consecutivas,Gire hacia abajo 3 veces seguidas;
Use la perilla "Regulación de velocidad del motor pequeño" para girar las páginas,Presione habilitar y gire la pequeña perilla de control de velocidad del motor para modificar los parámetros; Después de la modificación,Gire la página al final,Seleccione Guardar para salir,Presione el botón Habilitar para salir del menú;
Los parámetros son los siguientes: Corriente máxima:Rango de valor de retroalimentación de corriente de corriente grande,Rango de ajuste 15-200A,Predeterminado 60;
Parámetros de ajuste de velocidad:Modo automático El motor pequeño acelera rápida y lentamente,Cuanto más pequeño mas rápido,Rango de configuración 200-1500, Predeterminado 1000;
Parámetros de reducción de velocidad:Establezca el límite superior que permite el cambio de velocidad del motor,Cuando los cambios actuales exceden este valor,Se ralentizará。 Cuanto más pequeño es,Cuanto más rápido se desaceleran los motores izquierdo y derecho,Rango 05-12,Predeterminado 06;
Empiece a la madrugada: Velocidad A1:Cuanto mayor sea la velocidad del motor aumenta más rápido,Rango 00-06,Predeterminado 01;
Disminuir la velocidad A2:Cuanto mayor sea la velocidad del motor, más rápido disminuirá,Rango 00-06,Predeterminado 02;
Habilitar la regulación de la velocidad:¿Es necesario presionar la velocidad del motor pequeño para habilitarlo?,00No habilitado,01Permitir,Predeterminado 01;
Si el interruptor hacia adelante e inverso del motor grande permanecerá automáticamente a sí mismo después de que se libere,00No lo guarde,01Mantener,Predeterminado 01;
La caminata más grande:Velocidad máxima del motor,Rango 10-100,Predeterminado 50;
Corriente de corte:Corriente máxima de corte,La pantalla muestra el valor de IC,Rango 15-160,Predeterminado 30,La pantalla muestra el IC correspondiente:30。Límite superior de este parámetro = corriente máxima x80%;
Límite de velocidad predeterminado:Velocidad de corte automática de motor pequeño predeterminado,Rango 00-100,Predeterminado 10,La pantalla muestra f1.0,Este parámetro solo es preciso cuando la caminata máxima se establece en 50。
Canal inalámbrico:Predeterminado 10,Cuando la señal de control remoto es inestable,O cuando hay interferencia de señal en el sitio,Este parámetro se puede modificar,Canales de cambio,Evite la interferencia;
Desplazamiento del límite de velocidad:Límite de velocidad de corte automático mínimo para motor pequeño,Rango 00-200,Predeterminado 60,La pantalla correspondiente muestra 6.0;Valor de visualización límite superior = desplazamiento del límite de velocidad × 0.1;
Anfitrión más grande:Velocidad máxima del motor grande,Rango 10-100,Predeterminado 50;
Equipo MBUS (requerido):Selección de modelo de convertidor de frecuencia de motor grande,Rango 00-03,Predeterminado 03;
00-Shanghai Xielin 01-Fuji
02-Yingweiteng 03-Huichuan (Zhongchen、Robincon)
Equipo SBUS (requerido):Selección de modelo de convertidor de frecuencia de motor pequeño,Rango 00-05,Predeterminado 03;
00-Shanghai Xielin 01-Fuji
02-Yingweiteng 03-Huichuan (Zhongchen、Robincon)
04-Yaskawa tatsuya 05 no todavía
Configuración de parámetros del inversor
1.Selección de fuente de comando:Canal de comando de comunicación
2.Selección de fuente de frecuencia principal:Comunicación dada
3.Tasa de baudios:19200
4.Formato de datos:Sin verificación,Formato de datos<8-N-1>
5.Dirección local:El convertidor de frecuencia izquierdo se establece en 1,El convertidor de frecuencia correcto se establece en 2,El convertidor de frecuencia de motor grande se establece en 3
Instrucciones de operación de control remoto
1.La máquina está alimentada,Control remoto encendido,Ingrese el fondo de control remoto,Establezca los parámetros de fondo del control remoto,Principalmente, establezca modelos de motor de motor pequeño y motores grandes (el fabricante de la máquina ha establecido este paso para omitir este paso);
2.Establezca los parámetros del inversor (omita este paso si el fabricante de la máquina lo ha configurado);
3.El control remoto gira al modo manual,Luego use el control remoto para mover la máquina a la posición de trabajo;
4.En modo manual,Establezca el valor de corriente de corriente de corte grande IC IC,Establezca la velocidad del motor;
5.Gire al modo automático,Establezca el valor F del límite de velocidad de corte del motor pequeño;
6.En modo automático,Gire el interruptor de motor grande hacia adelante y encienda el motor grande,Luego gire el pequeño interruptor del motor hacia adelante o en el engranaje hacia atrás o hacia atrás,El control remoto ingresa al modo de corte automático,Empezar a cortar。


1.Por favor a temperatura ambiente y presión,Utilizado en ambientes secos,Extender la vida útil。
2.Evite mojarse bajo la lluvia、Utilizado en entornos anormales como ampollas,Extender la vida útil。
3.Mantenga limpia el compartimento de la batería y el área de metal de metal。
4.Evite apretar y caer, causando daños al control remoto。
5.No se usa durante mucho tiempo,Retire la batería,Y almacene el control remoto y la batería en un lugar limpio y seguro。
6.Preste atención a la humedad a prueba de humedad y a prueba de golpes durante el almacenamiento y el transporte。

1.Lea las instrucciones para su uso en detalle antes de usar,El personal no profesional está prohibido。
2.Reemplace la batería a tiempo cuando la batería sea demasiado baja,Evite los errores causados por una potencia insuficiente y que hace que el control remoto no pueda operar。
3.Si se requiere reparación,Póngase en contacto con el fabricante,Si el daño causado por la propia reparación,El fabricante no proporcionará una garantía。
(Observación:Actualizaciones o actualizaciones de productos,Póngase en contacto con el vendedor para obtener la información más reciente del producto al comprar productos)





