

Mando a distancia inalámbrico para pulidora de suelos
Molilla de piso Control remoto inalámbrico DH22ST-LE
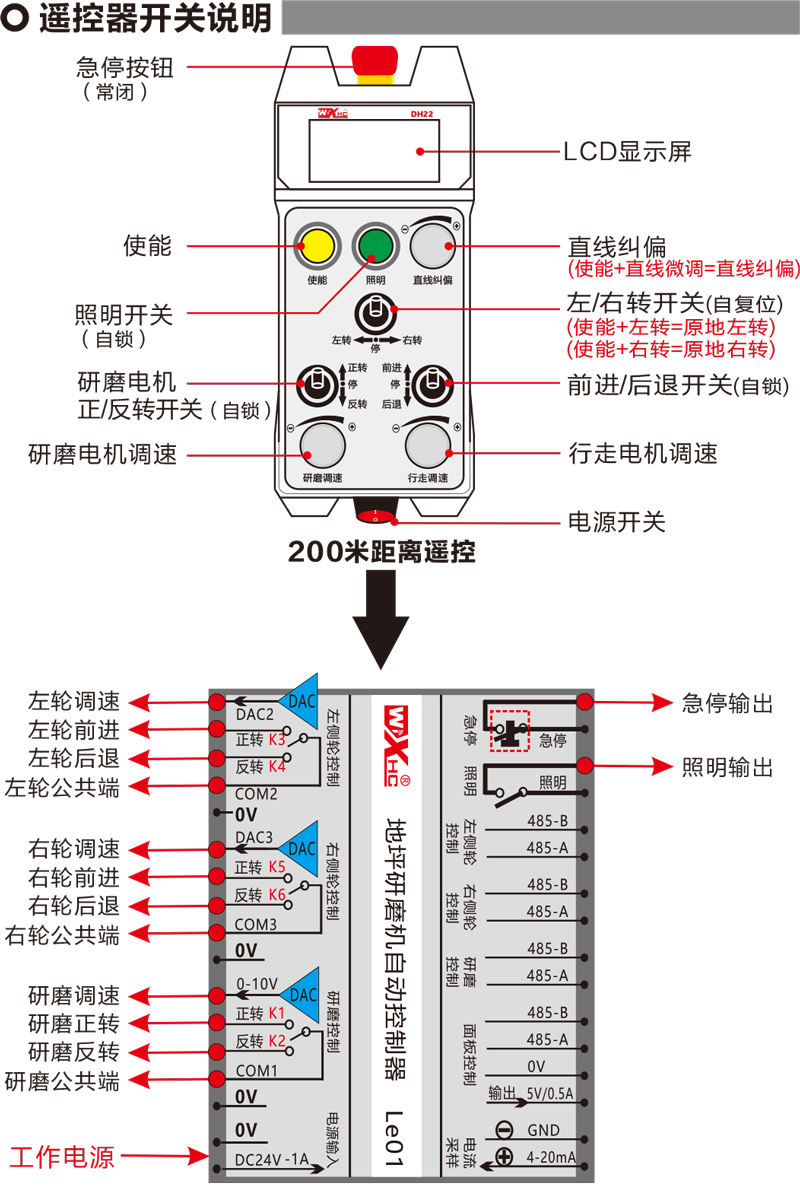
Descripción
![]()

modelo:DH22ST-Le
Equipo adaptativo:Molinillo

Observación:Se pueden seleccionar tres tipos de antenas,La antena de taza de succión predeterminada está equipada con estándar

parada de emergencia:El botón de parada de emergencia fue fotografiado.,Suelte el botón de parada de emergencia.
Baja presión:La batería del control remoto es demasiado baja,Reemplace la batería

Caer de Internet:Interrupción de señal inalámbrica,Verifique la fuente de alimentación del receptor,Encender de nuevo,Reiniciar el control remoto
![]()
1、Control remoto encendido
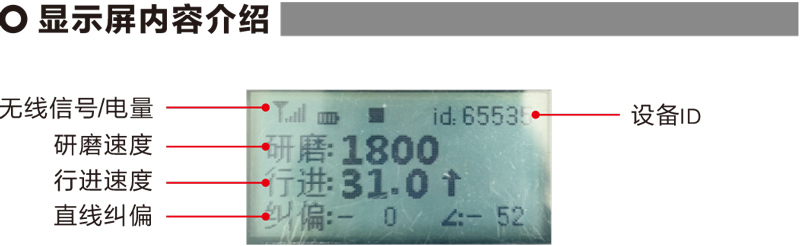
El receptor está encendido,La luz dirigida por RF en el receptor comienza a parpadear;Dos baterías No. 5 instaladas en el control remoto,Encienda el interruptor de encendido,Pantalla Velocidad del motor,Significa que la inicio es exitosa。
2、iluminación
Haga clic en el botón "Iluminación",La salida de iluminación del receptor está encendida,Aparece un icono de iluminación en la pantalla.
Haga clic en el botón Luz nuevamente,La salida de iluminación del receptor está apagada,El icono de foto desaparece de la pantalla。
3、Motor de molienda y regulación de velocidad.
Gire el interruptor "hacia adelante/reverso" hacia adelante,El receptor avanza hacia adelante y se abre.,La pantalla muestra la rotación hacia adelante
Gire el interruptor "hacia adelante/reverso" a revertir,Inversión de molienda del receptor abierta,Pantalla de inversión de visualización
Gire el interruptor "hacia adelante/reverso" a revertir,Inversión de molienda del receptor abierta,Pantalla de inversión de visualización
Gire la perilla "Velocidad de molienda",Puede ajustar el voltaje de salida de la velocidad de molienda del receptor 0-10V;
4、Motor de desplazamiento y regulación de velocidad.
Gire el interruptor "hacia adelante/reverso" hacia adelante,Progreso del revólver del receptor y progreso correcto Abierto,Mostrar adelante
Gire el interruptor "hacia adelante/reverso" a la parte posterior,Reversión del receptor y reversión de la rueda derecha,Volver a visualizar 
Gire la perilla de "ajuste de velocidad de marcha",Puede ajustar el voltaje de salida de velocidad de las ruedas izquierda y derecha del receptor de 0 a 10 V.;
5、Gire a la izquierda y a la derecha
Gire el interruptor de "izquierda/derecha" hacia la izquierda,Receptor La rueda derecha avanza para abrir,La pantalla de visualización gira a la izquierda 
Gire el interruptor de "izquierda/derecha" hacia la derecha,Se abre el avance del revólver del receptor,La pantalla de visualización gira a la derecha
6、Girando en su lugar
Gire a la izquierda en su lugar:Mantenga presionado el botón Habilitar,Mueva el interruptor "girar a la izquierda/derecha" a la posición de giro a la izquierda,Receptor rueda izquierda marcha atrás y rueda derecha adelante abierta,Empiece a girar a la izquierda en su lugar;
Gire a la derecha en su lugar:Mantenga presionado el botón Habilitar,Mueva el interruptor "girar a la izquierda/derecha" a la posición de giro a la derecha,Receptor rueda izquierda adelante y rueda derecha atrás abierta,Empiece a girar a la derecha en su lugar;
7、parada de emergencia
Tome el botón de parada de emergencia,La salida de parada de emergencia del receptor está desconectada;Todos los interruptores están apagados,Todas las velocidades borradas;
8、Corrección de línea recta
Cuando el motor izquierdo y derecho se mueve hacia adelante y hacia atrás,Hay una diferencia en las velocidades de izquierda y derecha.,Caminar en línea recta se compensa,Se puede utilizar la función de corrección de desviación lineal del control remoto,Tin une la velocidad de las ruedas izquierda y derecha;
Principio de corrección:A través de la función de corrección de sesgo,Velocidad del revólver de ajuste fino,Para lograr la misma velocidad que la rueda derecha,Darse cuenta de la sincronización de las velocidades de la rueda izquierda y derecha,Eliminar las compensaciones;
Método de operación de corrección:Mantenga presionado el botón Habilitar,Gire lentamente la perilla de "Corrección lineal";
Girar en sentido horario,Aumentar el voltaje de velocidad del revólver,Mayor valor de corrección de desviación de la pantalla;
Girar en sentido antihorario,Reducir el voltaje de velocidad del revólver,El valor de corrección de desviación de la pantalla se reduce;
Rango de corrección:Valor de corrección -90 a 90;1El voltaje de corrección de una unidad de corrección es de aproximadamente 0,04 V.;
9、Menú de parámetros (el usuario prohíbe la modificación privada)
Ingrese al modo de menú de parámetros:Cuando la molienda es 0,Rotación hacia adelante/hacia atrás 3 veces seguidas,Rómpelo 3 veces más;
método de salida:Elige guardar o no guardar,Confirme presionando el botón habilitar;
Rango de ajuste fino lineal:0-120;
Velocidad de molienda:0-3000;
velocidad al caminar:0-1000;
![]()
| Fuente de alimentación operativa del receptor |
DC24V/1A (fuente de alimentación independiente)
|
| Carga de punto de salida del receptor | CA0-250V/3A CC0-30V/5A |
| Voltaje de salida de regulación de la velocidad del receptor | DC0-10V |
El derecho final a interpretar este producto pertenece a Chengdu Xinshen Technology Co., Ltd.。





