
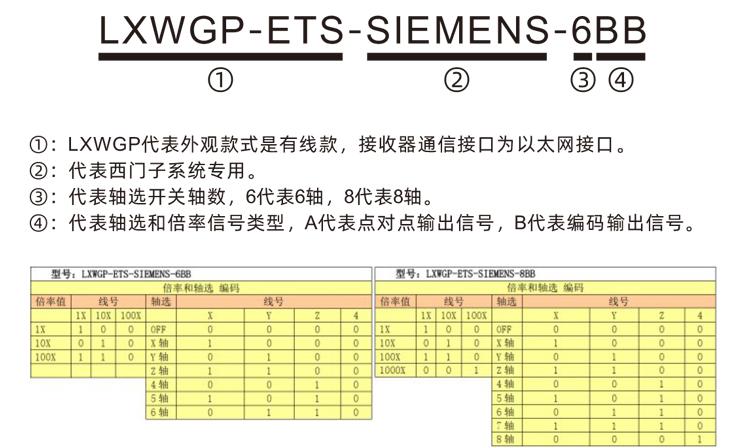
Volante electrónico cableado LXWGP-ETS-SIEMENS
Descripción


El volante electrónico se utiliza para la guía manual de máquinas herramienta CNC.、posición、Operación de ataque。Este modelo de volante electrónico es un volante electrónico cableado Siemens con pantalla real.,El volante está conectado a la interfaz X130 del sistema Siemens a través de un cable de red.,Lea las coordenadas del sistema y muéstrelas en la pantalla LCD del volante a través del protocolo de comunicación S7.,Y la selección del eje del sistema de control del volante se puede realizar a través de la comunicación.、aumento、Botón y otras señales.。

1.Conectado mediante un cable de enchufe de aviación de 6 núcleos,Longitud del cable del volante 10 metros.。
2.La pantalla del volante puede mostrar las coordenadas de la pieza de trabajo del sistema.、Coordenadas mecánicas、Velocidad de alimentación、Selección de eje、Información como aumento。
3.Apoyo el botón de parada de emergencia,Cantidad de salida de la señal IO,La parada de emergencia mediante volante sigue siendo eficaz。
4.Admite 6 botones personalizados,Cambio de señal IO,Puede enviar señales al sistema a través de cableado o comunicación IO。
5.Admite control de 6 u 8 ejes,Cambio de señal IO,Puede enviar señales al sistema a través de cableado o comunicación IO。
6.Admite 3 o 4 niveles de control de aumento,Cambio de señal IO,Puede enviar señales al sistema a través de cableado o comunicación IO。
7.Codador de pulso de soporte,100Pulso/círculo,La señal se puede enviar al sistema a través del cableado de pulso AB.。
8.Soporta protocolo Siemens S7,Soporte Siemens 828D、840ADSL、ONE y otros sistemas modelo。

| Tensión de alimentación de trabajo del volante | CC 24 V/1 A. |
| Voltaje de la fuente de alimentación del receptor | CC 24 V/1 A. |
| Rango de carga de salida IO del receptor |
CC 24 V
|
| Longitud del cable del extremo del volante |
10metro
|
| Longitud del cable del extremo del receptor |
1metro
|
| Longitud del cable de red del extremo del receptor |
3metro
|
| Temperatura de funcionamiento |
-25℃<incógnita<55℃
|
| Altura contra la caída |
1metro
|
| Personalizar la cantidad de botones | 6individual |
| Tamaño del producto | 233*90.7*77.4(mm) |


Comentario:
Botón de parada de emergencia:
Presione el botón de parada de emergencia,Se desconectan dos grupos de paradas de emergencia IO en el receptor,Y todas las funciones del volante no son válidas。
Después de que se libere la parada de emergencia,STOP DE EMERGENCIA La salida IO cerrada en el receptor,Se restauran todas las funciones del volante。
② pantalla de pantalla:
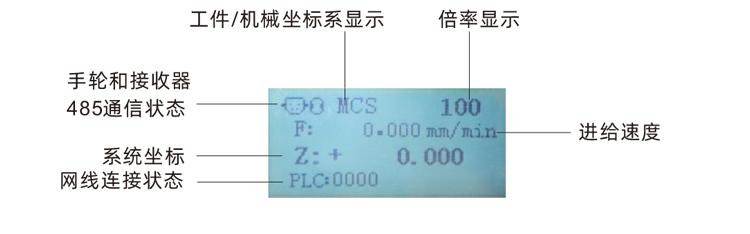
SOCIEDAD ANÓNIMA:0000Significa que el cable de red no está conectado.,SOCIEDAD ANÓNIMA:1010Significa que el cable de red y el sistema PLC están conectados correctamente.,
SOCIEDAD ANÓNIMA:1110Indica que el volante escribe datos del sistema correctamente.,SOCIEDAD ANÓNIMA:0001Indica una conexión exitosa a la computadora。
Botones Custom:
6Botones personalizados,Cada botón corresponde a un punto de salida IO en el receptor,También conectado al sistema a través de comunicación.。
Switch de selección de exis:
Cambiar el interruptor de selección del eje puede cambiar el eje en movimiento controlado por la rueda de mano。
⑤Botón Habilitar:
Mantenga presionado cualquier botón de habilitación en ambos lados,El codificador de pulso de balanceo es efectivo。 Y los dos grupos en el receptor habilitan la conducción de salida de IO,Suelte el botón Habilitar,Habilitar la desconexión de la salida de IO。
⑥Interruptor de aumento:
Cambiar el interruptor de aumento para cambiar la ampliación controlada por la rueda de mano。
⑦Codificador de pulsos:
Mantenga presionado el botón Habilitar,Codador de pulso tembloroso,Enviar una señal de pulso,Controlar el movimiento del eje de la máquina。
⑧Cable del volante:
Cable que conecta el volante y el receptor,enchufe de aviación,Para alimentación y comunicación mediante volante。



6.1Pasos de instalación de productos
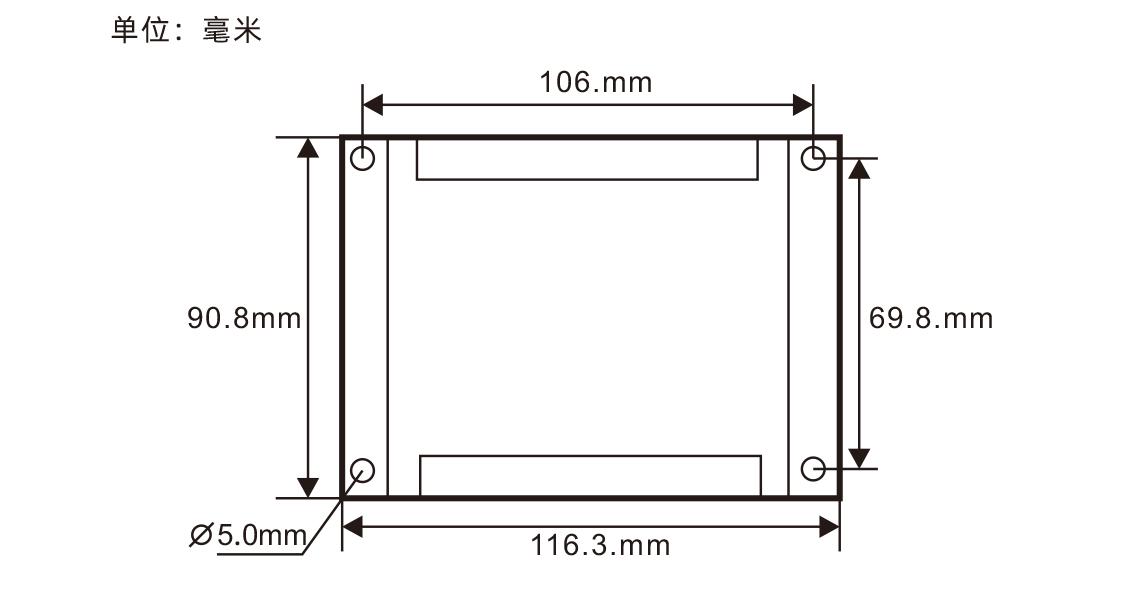
1.Instale el receptor en el gabinete eléctrico a través de los orificios para tornillos en las cuatro esquinas.。
2.Consulte nuestro diagrama de cableado del receptor,Compare su equipo en el sitio,Conecte el dispositivo a través del cable y el receptor.
conectar,Utilice un cable de red para conectar el receptor a la interfaz X130 del sistema。
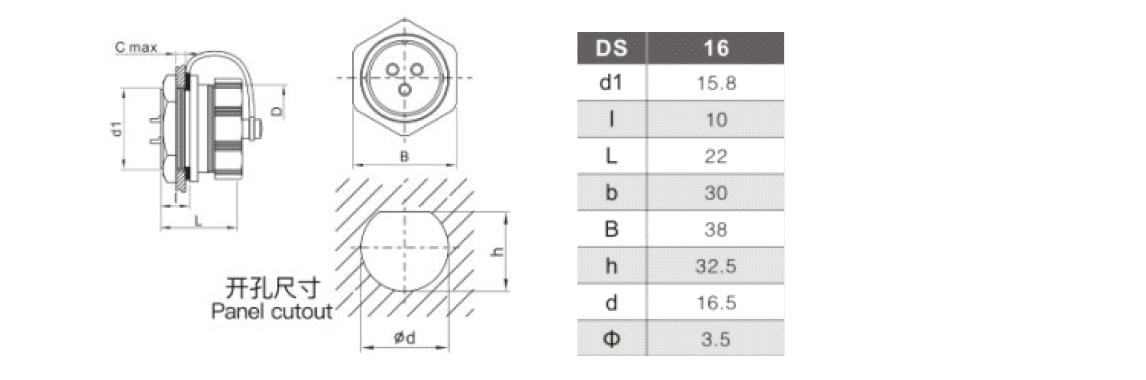
3.Después de que el receptor sea arreglado,Instale la base del enchufe de aviación en la abertura del volante en el panel.,otra base
La regleta de terminales se enchufa en la interfaz del volante del receptor.。Luego inserte el enchufe de aviación del cable del extremo del volante en la base.,Apretar
accesorios。
6.2Tamaño de instalación del receptor
6.3Dimensiones de instalación del enchufe de aviación
6.4Diagrama de referencia de cableado del receptor

6.2Tamaño de instalación del receptor
6.3Dimensiones de instalación del enchufe de aviación
6.4Diagrama de referencia de cableado del receptor

1.El receptor está encendido,La luz de operación del receptor está encendida,Conecte el receptor a la computadora usando un cable de red,Establezca una dirección IP fija para su computadora,Utilice el software de la herramienta de configuración de red para configurar los parámetros de red para la función del volante,Configuraciones específicas
Para conocer el método, consulte las "Instrucciones de uso del volante con cable LXWGP-ETS".。
2.Una vez completada la configuración del receptor,El sistema requiere programación del programa PLC.,Para obtener más información, consulte "Métodos de configuración LXWGP-ETS para diferentes sistemas CNC Siemens" y la información de rutina del programa PLC.。
3.Una vez completadas las configuraciones anteriores,Lleve el receptor al armario eléctrico de la máquina e instálelo.,Desenchufe el cable de red de la computadora y conéctelo a la interfaz X130 del sistema.,Conecte los cables de alimentación y pulso del receptor.。
4.La máquina está alimentada,El receptor está encendido,La luz de operación del receptor está encendida,Encienda el interruptor de encendido del volante,Arranque de pantalla de volante,PLC de visualización de pantalla:1010,Indica una comunicación exitosa entre el volante y el sistema.。
5.Seleccionar selección de eje:Interruptor de selección del eje del interruptor,Seleccione el eje que desea operar。
6.Seleccione el multiplicador:Cambiar el interruptor de aumento,Seleccione el multiplicador que necesita。
7.Mover el eje:Mantenga presionado el botón Habilitar,Seleccione el eje y el interruptor,Seleccione el interruptor multiplicador,Luego gire el codificador de pulso,Gire el eje de movimiento hacia adelante en el sentido de las agujas del reloj,Gire el eje negativo del eje en sentido antihorario。
8.Mantenga presionado cualquier botón personalizado,La salida del botón IO correspondiente del receptor está encendida,Libere la salida del botón Cerrar。
9.Presione el botón de parada de emergencia,El receptor desconecta la salida de parada de emergencia IO,La función del volante falla,Suelte el botón de parada de emergencia,STOP DE EMERGENCIA SALIDA DE IO CERRADO,Recuperación de la función de volante。


| Situación de falla | Causa posible |
Métodos de solución de problemas
|
|
|
Métodos de solución de problemas
|
1.Si el cable de aviación entre el volante y el receptor está conectado de forma correcta y fiable
2.¿Es suficiente el voltaje de alimentación del receptor?
3.Falla del volante
|
1.Comprobar la conexión del cable de aviación entre el volante y el receptor.
2.Verifique la potencia de entrada del receptor
3.Póngase en contacto con el fabricante para regresar a la fábrica para su mantenimiento
|
|
| No hay respuesta al operar el volante |
1.¿Están conectados los cables de red entre el receptor y el sistema?
2.¿Está bien escrito el programa del PLC del sistema?
3.¿Está correctamente configurada la configuración del receptor?
4.¿Ha fallado el ícono de comunicación 485 que se muestra en la pantalla del volante?
5.Al operar el volante,Debes mantener presionados los botones de activación en ambos lados
6.¿Se ha soltado el botón de parada de emergencia?
|
1.Compruebe si el receptor y el puerto de red X130 del sistema están conectados con un cable de red
2.Verifique y confirme si el PLC del sistema está escrito de acuerdo con los materiales de referencia que proporcionamos.
3.Compruebe si el receptor hace referencia a nuestra información y al software de herramientas proporcionado,Configure correctamente los parámetros de red y la dirección DB del receptor, etc.
4.Verificación entre el volante y el receptor
6núcleo verde zócalo,Dos de las líneas de comunicación.:485-A y 485-B,¿Está conectado de forma correcta y segura?,¿Hay alguna interrupción del circuito?
|
|
|
Después de que el receptor se enciende,La luz de trabajo del receptor no se enciende
|
1.Anormalidad de la fuente de alimentación
2.Error de cableado de potencia
3.Insuficiencia receptora
|
1.Verifique si la fuente de alimentación tiene voltaje,
¿El voltaje cumple con los requisitos?
2.Verifique si los polos positivos y negativos de la fuente de alimentación están conectados en reversa
3.Volver al mantenimiento de fábrica
|

1.Por favor a temperatura ambiente y presión,Utilizado en ambientes secos,Extender la vida útil。
2.Evite mojarse bajo la lluvia、Utilizado en entornos anormales como ampollas,Extender la vida útil。
3.Por favor mantenga la rueda de mano limpia,Extender la vida útil。
4.Por favor evite apretar、Caer、Topes, etc.,Evitar accesorios de precisión dentro del volante por daños o errores de precisión。
5.No se usa durante mucho tiempo,Guarde el volante en un lugar limpio y seguro。
6.Preste atención a la humedad a prueba de humedad y a prueba de golpes durante el almacenamiento y el transporte。

1.Lea las instrucciones para su uso en detalle antes de usar,El personal no profesional está prohibido。
2.Después de que ocurra cualquier situación anormal en el volante,Por favor deja de usarlo inmediatamente.,y solucionar problemas,Antes de solucionar problemas,Está prohibido volver a utilizar el volante defectuoso.,Evite accidentes de seguridad debido a fallas desconocidas en el volante;
3.Si se requiere reparación,Póngase en contacto con el fabricante,Si el daño causado por la propia reparación,El fabricante no proporcionará una garantía。





