
Kontrol remote nirkabel pemotongan otomatis untuk gergaji tali crawler
Dh12s-2r-ld-485 crawler rope melihat pemotongan remote control
Keterangan


Remote control pemotongan otomatis gergaji kawat perayap cocok untuk mesin pemotong gergaji kawat perayap,Gunakan protokol 485Modbus RTU untuk mengontrol inverter perayap kiri dan kanan,Serta pengatur kecepatan konversi frekuensi motor besar start dan pengontrol arah depan, belakang, kiri dan kanan。Dan arus kerja inverter motor besar dapat dibaca melalui protokol 485-Modbus RTU,Analisis dan perbandingan arus motor besar pada saat startup,Secara otomatis menyesuaikan kecepatan trek kiri dan kanan secara real time,Sadarilah fungsi pemotongan otomatis。

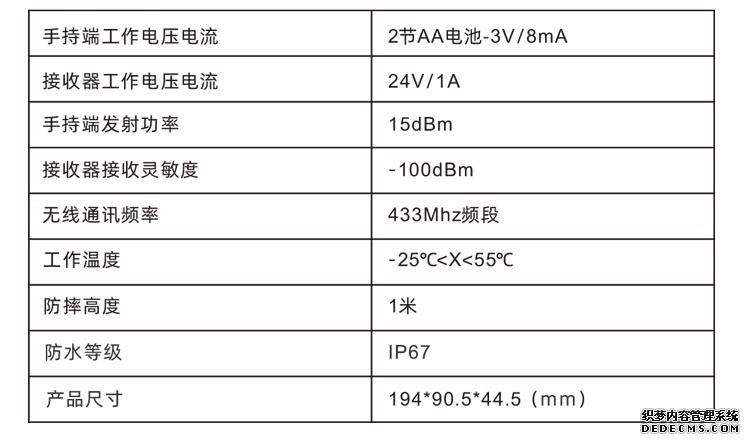
1.Mengadopsi teknologi komunikasi nirkabel 433MHz,Jarak pengoperasian nirkabel 100 meter。
2.Mengadopsi fungsi hopping frekuensi otomatis,Gunakan 32 set remote control nirkabel secara bersamaan,Tidak ada efek satu sama lain。
3.Mendukung semua konverter frekuensi dengan protokol 485-Modbus RTU,Merek inverter yang diadaptasi saat ini meliputi: Shanghai Xielin、Fuji、Huichuan、Zhongchen、INVT、Yasukawa Tatsu。Jika merek tidak disesuaikan, silakan hubungi kami untuk penyesuaian.。
4.Mendukung startup inverter motor besar、pengaturan kecepatan、Bacaan saat ini。
5.Mendukung penyesuaian kecepatan inverter perayap kiri dan kanan、rintisan、Kontrol depan dan belakang kiri dan kanan。
6.Mendukung koreksi linier inverter perayap kiri dan kanan,Jaga agar mesin tetap bergerak dalam garis lurus。
7.Kawat pendukung melihat fungsi pemotongan otomatis,Menurut informasi motor besar saat ini,Secara otomatis menyesuaikan kecepatan trek kiri dan kanan secara real time。
8.Ini juga kompatibel dengan output IO langsung untuk mengontrol start dan stop motor.,Output tegangan analog mengontrol kecepatan motor。



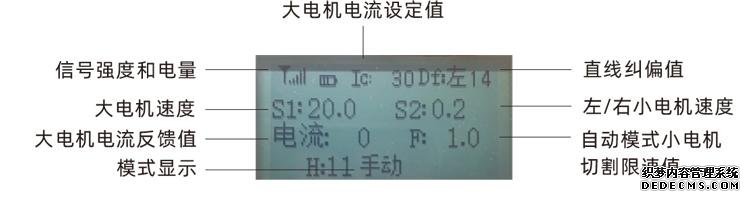
Komentar: ①Tampilan layar:
②Sakelar mode:
Mengadopsi saklar 2 kecepatan,Dapat beralih antara mode otomatis dan manual,Akan ada peralihan tampilan mode yang sesuai pada tampilan layar.。
③ Aktifkan:
Tombol kombinasi,Beberapa pengoperasian memerlukan menekan dan menahan tombol aktifkan untuk beroperasi,Lihat deskripsi setiap sakelar untuk detailnya.。
④ Sakelar motor besar:
Mengadopsi saklar reset 3 kecepatan,balikkan tombol ini,Dapat mengontrol putaran maju dan mundur motor besar,Statusnya akan tetap ada setelah dilepaskan,Akan ada tampilan yang sesuai di layar,↑Panah menunjukkan rotasi ke depan,↓Panah menunjukkan pembalikan。
⑤ Sakelar maju/mundur motor kecil:
Mengadopsi sakelar pengunci otomatis 3 kecepatan,balikkan tombol ini,Dapat mengontrol motor kecil untuk bergerak maju dan mundur,Akan ada tampilan yang sesuai di layar,↑Panah berarti bergerak maju,↓Panah menunjukkan kembali。
⑥ Sakelar daya kendali jarak jauh:
Besarnya nilai kecepatan motor berubah sekitar 0,2 satuan, Menggunakan kenop encoder multi-putaran,Putar kenopnya,Sesuaikan besar kecepatan motor S1。1 bingkai per putaran, Rotasi yang cepat dapat dengan cepat mengubah nilai kecepatan motor yang besar。
⑦Saklar pemutar motor kecil:
Mengadopsi saklar reset 3 kecepatan,Putar sakelar ini dalam mode manual,Dapat mengendalikan motor kecil untuk belok kiri dan kanan,Remote control akan secara otomatis menghentikan tindakan ini setelah dilepaskan.。 Dalam keadaan maju,balikkan tombol ini,Akan ada tampilan yang sesuai di layar,←Panah menunjukkan belok kiri,→Panah menunjukkan belok kanan。 Dalam keadaan mundur,balikkan tombol ini,Akan ada tampilan yang sesuai di layar,←Panah menunjukkan belok kiri,→Panah menunjukkan belok kanan。 Tekan dan tahan untuk mengaktifkan,Kemudian balikkan tombol ini,Dapat melakukan fungsi pembubutan di tempat,Berputar lebih cepat。
⑧Pengaturan kecepatan motor besar :
Besarnya nilai kecepatan motor berubah sekitar 0,2 satuan, Menggunakan kenop encoder multi-putaran,Putar kenopnya,Sesuaikan besar kecepatan motor S1。1 bingkai per putaran, Rotasi yang cepat dapat dengan cepat mengubah nilai kecepatan motor yang besar。
⑨Pengaturan kecepatan motor kecil:
(Koreksi deviasi linier) mengadopsi kenop encoder multi-putaran,Dalam mode manual,Setiap kali kenop diputar 1 langkah,Nilai kecepatan motor kecil berubah sekitar 0,1 satuan,Rotasi cepat dapat dengan cepat mengubah nilai kecepatan motor kecil。Dalam mode otomatis,Tekan tombol aktifkan,Kemudian putar 1 frame setiap kali,Nilai batas kecepatan motor kecil F berubah sekitar 0,1 satuan,Rotasi cepat dapat dengan cepat mengubah nilai batas kecepatan motor kecil。Tekan tombol aktifkan,Putar kenop ke kanan,Tampilan koreksi garis lurus:Df:kiri,Setiap putaran kenop bertambah 1 satuan.;Putar kenop ke kiri,Tampilan koreksi garis lurus:Df:Kanan,Setiap putaran kenop bertambah 1 satuan.;Setiap unit koreksi sesuai dengan tegangan AVI pengaturan kecepatan motor sekitar 0,02V.。



Langkah Instalasi Produk
1.Pasang penerima di lemari listrik melalui snap-on di bagian belakang,Atau pasang di kabinet listrik melalui lubang sekrup di keempat sudut receiver。
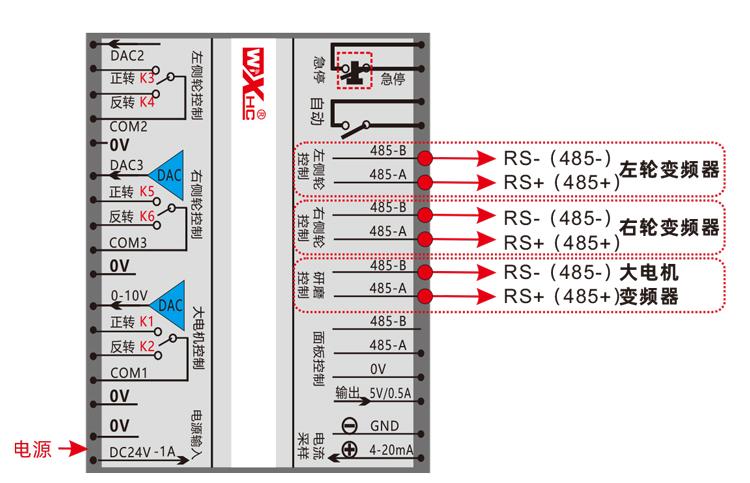
2.Lihat Diagram Pengkabelan Penerima kami,Bandingkan peralatan di tempat Anda,Hubungkan perangkat ke penerima melalui kabel。
3.Setelah penerima diperbaiki,Antena yang dilengkapi dengan penerima harus terhubung,Dan pasang atau letakkan ujung luar antena di luar kabinet listrik,Dianjurkan untuk menempatkan sinyal di bagian atas lemari listrik.,Tidak diperbolehkan memutuskan antena,Atau letakkan antena di dalam kabinet listrik,Hal ini dapat mengakibatkan sinyal buruk dan tidak dapat digunakan。
4.Terakhir, pasang baterai di remote control,Kencangkan penutup baterai,Kemudian hidupkan sakelar daya kendali jarak jauh,Tampilan kendali jarak jauh akan menunjukkan antarmuka kerja normal.,Anda dapat melakukan operasi kendali jarak jauh。
Ukuran pemasangan penerima
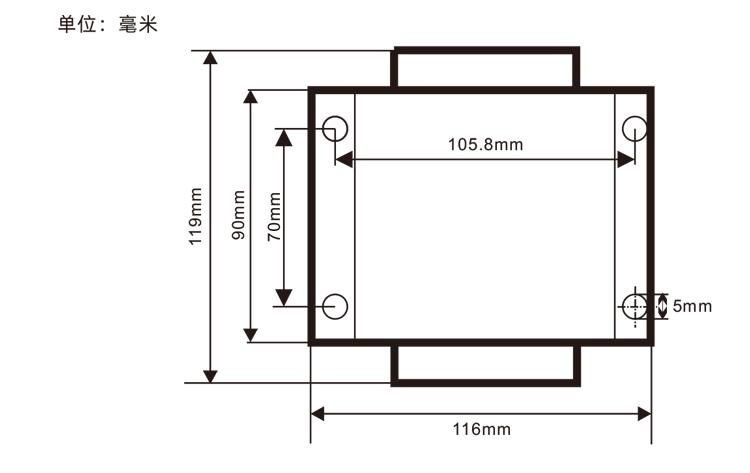
Diagram referensi kabel penerima

Pengaturan parameter kendali jarak jauh
Masukkan metode parameter latar belakang kendali jarak jauh:Pindahkan sakelar mode ke mode manual,Sesuaikan kecepatan motor kecil menjadi 25, atau 0、10、20、40、50,Tarik sakelar putaran maju motor besar ke atas 3 kali berturut-turut,Tarik ke bawah 3 kali berturut-turut;
Gunakan kenop "Pengaturan Kecepatan Motor Kecil" untuk membalik halaman,Setelah menekan aktifkan, putar kenop pengatur kecepatan motor kecil untuk mengubah parameter.; Setelah modifikasi,Balik halaman sampai akhir,Pilih Simpan dan Keluar,Tekan tombol aktifkan untuk keluar dari menu;
Parameternya adalah sebagai berikut: Arus maksimum:Kisaran nilai umpan balik arus motor besar,Rentang pengaturan 15-200A,Bawaan 60;
Parameter kontrol kecepatan:Mode otomatis motor kecil secara otomatis mempercepat kecepatan,Semakin kecil, semakin cepat,Rentang pengaturan 200-1500, Standarnya 1000;
Parameter perlambatan:Tetapkan batas atas perubahan kecepatan motor yang diperbolehkan,Ketika perubahan saat ini melebihi nilai ini,akan melambat。 Semakin kecil,Motor kiri dan kanan melambat lebih cepat,Kisaran 05-12,Bawaan 06;
Mulailah mengunci diri: Percepatan a1:Semakin besar motor, semakin cepat pula peningkatan kecepatannya.,Rentang 00-06,Bawaan 01;
Perlambatan a2:Semakin besar kecepatan motor maka akan semakin cepat pula penurunannya.,Rentang 00-06,Bawaan 02;
Aktifkan penyesuaian kecepatan:Apakah perlu menekan Enable untuk mengatur kecepatan motor kecil?,00Cacat,01memungkinkan,Bawaan 01;
Apakah motor besar akan secara otomatis mengunci sendiri setelah saklar maju dan mundur dilepaskan?,00jangan pertahankan,01Menyimpan,Bawaan 01;
berjalan maksimal:Kecepatan maksimum motor kiri dan kanan,Kisaran 10-100,Bawaan 50;
Memotong arus:Arus pemotongan maksimum,Layar menampilkan nilai IC,Kisaran 15-160,Bawaan 30,Layar IC tampilan yang sesuai:30。Batas atas parameter ini = arus maksimum x80%;
Batas kecepatan bawaan:Kecepatan potong otomatis motor kecil default saat startup,Kisaran 00-100,Bawaan 10,Layar harus menampilkan F1.0,Parameter ini hanya akurat bila jalan maksimum diatur ke 50。
saluran nirkabel:Bawaan 10,Ketika sinyal remote control tidak stabil,Atau ketika ada gangguan sinyal di lokasi,Parameter ini dapat dimodifikasi,beralih saluran,menghindari gangguan;
Offset Batas Kecepatan:Batas atas kecepatan potong otomatis motor kecil,Kisaran 00-200,Bawaan 60,Layarnya sesuai dengan tampilan 6.0;Nilai tampilan batas atas = offset batas kecepatan × 0,1;
tuan rumah terbesar:Kecepatan maksimum motor besar,Kisaran 10-100,Bawaan 50;
perangkat mbus (wajib):Pemilihan model inverter motor besar,Rentang 00-03,Bawaan 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
perangkat sbus (wajib):Pemilihan model inverter motor kecil,Kisaran 00-05,Bawaan 03;
00-Shanghai Xielin 01-Fuji
02-INVT 03-Huichuan (Zhongchen、Robin Kang)
04-Yasukawa Tatsu 05-Tidak ada
Pengaturan parameter konverter frekuensi
1.Pemilihan sumber perintah:Saluran perintah komunikasi
2.Pemilihan sumber frekuensi utama:komunikasi yang diberikan
3.tingkat baud:19200
4.Format datanya:Tidak ada checksum,Format datanya<8-N-1>
5.Alamat lokal:Konverter frekuensi kiri diatur ke 1,Konverter frekuensi kanan diatur ke 2,Inverter motor besar diatur ke 3
Petunjuk pengoperasian kendali jarak jauh
1.Mesinnya bertenaga,Remote control dihidupkan,Masukkan latar belakang kendali jarak jauh,Atur parameter latar belakang kendali jarak jauh,Yang utama adalah mengatur model inverter motor kecil dan motor besar (lewati langkah ini jika pabrikan mesin sudah mengaturnya);
2.Atur parameter inverter (lewati langkah ini jika produsen mesin telah mengaturnya);
3.Alihkan kendali jarak jauh ke mode manual,Kemudian gunakan remote control untuk memindahkan mesin ke posisi kerja;
4.Dalam mode manual,Atur IC nilai pengaturan arus pemotongan motor besar,Atur kecepatan motor maksimum;
5.Beralih ke mode otomatis,Tetapkan nilai F batas kecepatan potong motor kecil;
6.Dalam mode otomatis,Putar saklar motor besar ke depan untuk menghidupkan motor besar,Kemudian putar saklar motor kecil ke gigi maju atau mundur,Remote control memasuki mode pemotongan otomatis,Mulailah memotong。


1.Silakan pada suhu dan tekanan kamar,Digunakan di lingkungan kering,Memperpanjang masa pakai。
2.Harap hindari basah dalam hujan、Digunakan dalam lingkungan abnormal seperti lecet,Memperpanjang masa pakai。
3.Harap jaga kebersihan tempat baterai dan area pecahan peluru logam。
4.Harap hindari menekan dan menjatuhkan remote control, yang dapat menyebabkan kerusakan.。
5.Tidak digunakan untuk waktu yang lama,Silakan keluarkan baterainya,Dan simpan remote control dan baterainya di tempat yang bersih dan aman。
6.Perhatikan bukti kelembaban dan kejut selama penyimpanan dan transportasi。

1.Harap baca instruksi untuk digunakan secara detail sebelum digunakan,Personel non-profesional dilarang。
2.Harap ganti baterai dalam waktu saat baterai terlalu rendah,Hindari kesalahan yang disebabkan oleh daya baterai yang tidak mencukupi yang menyebabkan remote control tidak dapat dioperasikan.。
3.Jika perbaikan diperlukan,Silakan hubungi produsen,Jika kerusakan yang disebabkan oleh perbaikan diri,Pabrikan tidak akan memberikan garansi。
(Komentar:Peningkatan produk atau situasi peningkatan,Saat membeli produk, silakan hubungi staf penjualan untuk status produk terbaru)
-500x650.png)




